
## 產業背景

> 隨著《中國制造2025》、《機器人產業發展規劃(2016-2020年)》等文件正式發布,明確指出要組織實施智能制造產業人才培養計劃,加強各大高校智能制造相關學科專業建設,加大智能制造相關專業培訓教育力度,加快培養高新科技行業急需的高層次技術研發、管理、操作、維修等各類人才。
> 國家實施創新驅動發展、“中國制造2025”、“互聯網+”、“一帶一路”等重大戰略,以新技術、新業態、新產業為特點的新經濟蓬勃發展,要求工程科技人才具備更高的創新創業能力和跨界整合能力,加快新工科建設,助力經濟轉型升級。
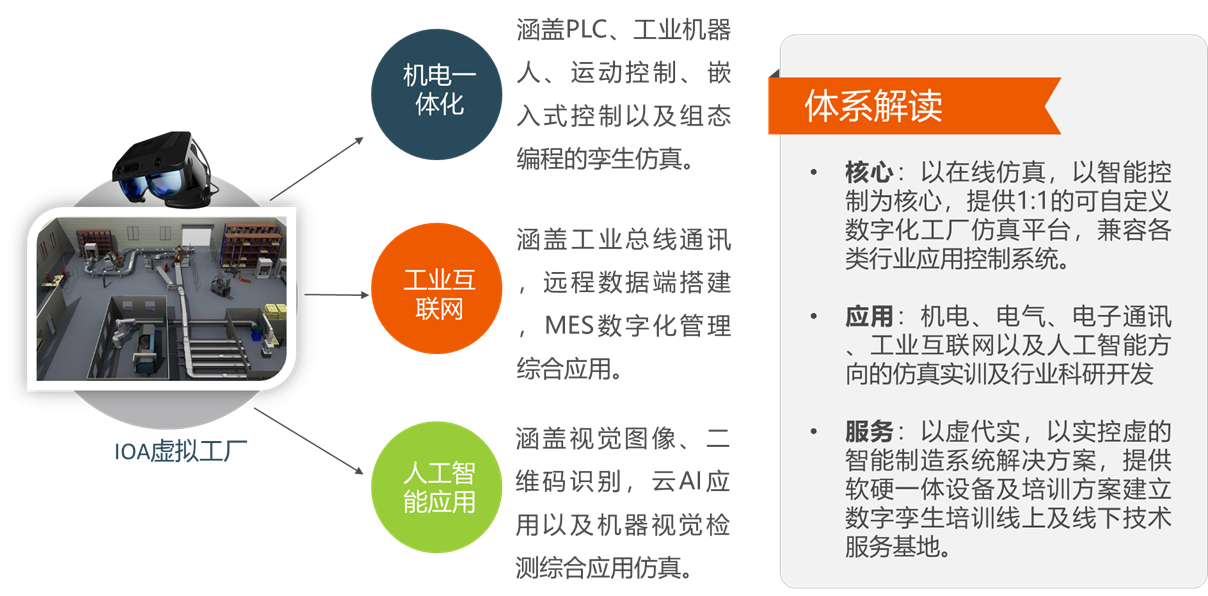
> 圍繞智能制造是一套綜合性的人才培養機制,各個專業學科之間具有交叉,且基礎學科之間也具有一定的培養方向性,**該方案圍繞現有的高等教育的電氣自動化、計算機、機械自動化、電子信息工程四個專業,以智能控制為方向建立虛實一體化的綜合人才培養機制。**
## 虛實孿生的建設思路優勢

> 數字孿生完成的是現實世界中物理模型在虛擬空間的映射。物理模型指的是現實世界中的各種設備:人、機械臂、數控機床、自動化儀表、手機等,虛擬世界您可以簡單的理解為由各種智能計算設備構成的數字世界;通過數字孿生技術,我們現實世界中的每個設備都將在虛擬世界中有一個無論外觀還是內部構造都與其一模一樣的數字實體。
> 解決傳統教儀設備“不直觀”,“用不好”,“成本高”等難題;
> 1、解決從行業需求到實訓人才培養脫節問題
> 通過數字孿生仿真技術,能夠將行業的典型示范性工廠,半實物虛擬化,并結合虛實仿真技術,保留其原有的控制系統以及機電系統,將企業需求的控制,編程應用人才與校內實訓課程結合,實際解決,學生實訓過程中無示范性,應用性等問題。
> 2、解決教學實訓中“三高四難”問題
> 數字孿生仿真技術特點是使用者可以進行交互,因此,可以作為增強教學培訓和演練效果的有效手段,解決智能制造實訓應用過程中的“三高”(高危險、高成本、高污染)與“四難”(難看到、難動作、難進入、難再現)問題。
> 3、學科交叉與產業融合
> 通過數字孿生技術引入企業實際工作任務,設計教學和競賽項目。實訓內容設計圍繞智能制造工業應用情景和核心技能點,覆蓋了機器人、人工智能、通訊技術、數控技術、自動線等典型應用。技能要點與行業用人、崗位需求、技術進步以及教學建設相結合,系統裝調、現場工藝規范系統接線、工藝過程分析、系統編程等相互結合進行安排,引導智能制造技術相關專業專項實訓教學的設計與實施,系統化培養復合型技能型人才。
> 4、減少設備投入成本,易維護,易保養
> 虛實結合智慧工廠能夠采用真實的自動化控制系統,如PLC、機器人示教器、運動控制器等,采用虛擬控制對象,大大減小了設備所需要的投入成本及維護成本,且具有更為靈活的內容資源庫,通過硬件模擬技術打通控制器與虛擬化的通信,即學生操作實訓采用PLC編程控制,工業機器人示教編程應用,MES調度以及數控設備的實操,通過虛擬裝備的3D展示,達到與真實的智慧工廠同樣的實訓效果。
## 服務專業類別
| 專業大類 | 實訓技能 |
| --- | --- |
| 電氣自動化 | PLC編程、電氣CAD、機器人技術、組態編程、運動控制開發 |
| 工業機器人 | 機器人編程技術、機器人電氣自動化、機器人人工智能應用 |
| 組態編程與計算機軟件 | C#上位機開發、C++編程、嵌入式編程開發、數據庫開發、JAVA開發 |
| 工業物聯網技術 | 單片機開發、C語言、電子通訊技術、無線傳感網、物聯網應用技術 |
| 人工智能技術 | 圖像識別云AI實訓,基于硬件的圖像識別,語音識別與控制 |
| 移動互聯技術 | JAVA編程、數據庫編程、網絡通訊與控制、前端WEB設計開發 |
## 崗位能力培養
* 電氣自動化:
培養培養熟悉電氣工程及自動化領域相關基礎知識及專業知識,能夠從事與電氣工程有關的安裝、調試、運 行、檢修及一般工程設計和技術管理工作的工程技術應用型人才。
* 工業機器人:
能夠掌握一般工業機器人的結構、運動原理等基本知識,掌握機器人的安裝調試、編程操作、維護與維修的技能,并具有良好的實際生產水平,滿足工業機器人應用的技能要求。
* 計算機軟件開發:
熟悉計算機系統常用軟硬件工具,具有一定的硬件維護能力和較強的軟件開發能力的應用型人才。學生除須掌握計算機軟件領域的基本理論知識外,重點學習國際軟件工業界最新的軟件開發設計技術和軟件項目管理方法,能熟練使用國際軟件工業界最新的流行軟件工具,高質量地開發大中型軟件項目。
VB編程、C#編程、JAVA編程以及C++編程應用
* 移動互聯開發:
JAVA編程、數據庫編程、網絡通訊與控制、前端WEB設計開發、移動互聯設備安裝與調試、移動互聯應用系統集成與測試、移動互聯應用程序設計、移動互聯應用程序綜合應用等
* 人工智能開發:
培養掌握人工智能理論與工程技術的專門人才為目標,學習機器學習的理論和方法、深度學習框架、工具與實踐平臺、自然語言處理技術、語音處理與識別技術、視覺智能處理技術。
## 產學研服務
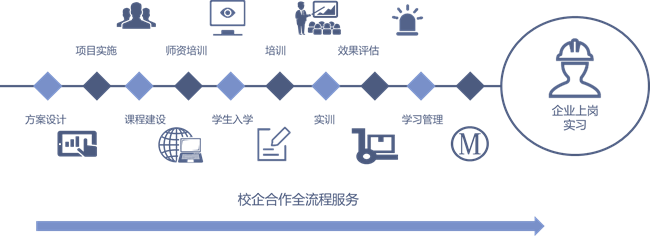
**引入企業實際工作任務,設計教學和競賽項目。**實訓內容設計圍繞智能制造工業應用情景和核心技能點,覆蓋了機器人、人工智能、通訊技術、數控技術、自動線等典型應用。堅持技能要點與行業用人、崗位需求、技術進步以及教學建設相結合,系統裝調、現場工藝規范系統接線、工藝過程分析、系統編程等相互結合進行安排,引導智能制造技術相關專業專項實訓教學的設計與實施,系統化培養高端技能型人才。
* **技能實訓:**滿足從工業4.0認知到基礎實操,再到維護,集成達到企業對智慧工廠應用型人才需求的技能實訓需求。
* **國家先進虛擬仿真中心:**具有線上直播,線下實訓,虛實結合特點的智能制造仿真中心平臺。
* **技能鑒定:**滿足對工業4.0應用型人才,智能制造集成人才的相關專業技能鑒定需求。
* **大賽:**滿足相關職業技能大賽的培訓及賽項實訓應用需求。
* **社會人員校外培訓:**滿足對校外相關從業人員或企業的相關技能培訓及培訓證書的認證。
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝