## 說明
匯邦新型PLC系統內嵌標準PID控制庫,具有溫控儀表一樣的控制性能和以及使用方便等特點。帶自整定功能,帶雙向PID控制等儀表所擁有的功能。
PLC的PID控制庫不采用梯形圖指令方式工作,而是采用軟件配置的方法,梯形圖指令工作時,由于指令周期的影響,會造成控制效率不理想。配置方式不僅解決了使用困難的問題,而且控制效果上也與專用的溫控模塊一致,是理想的控制解決方案。
## 注意
在PID輸出中配置的Y輸出口,**不能在梯形圖中以OUT輸出**,會形成雙線圈效應導致程序下載不正常。
## 配置過程
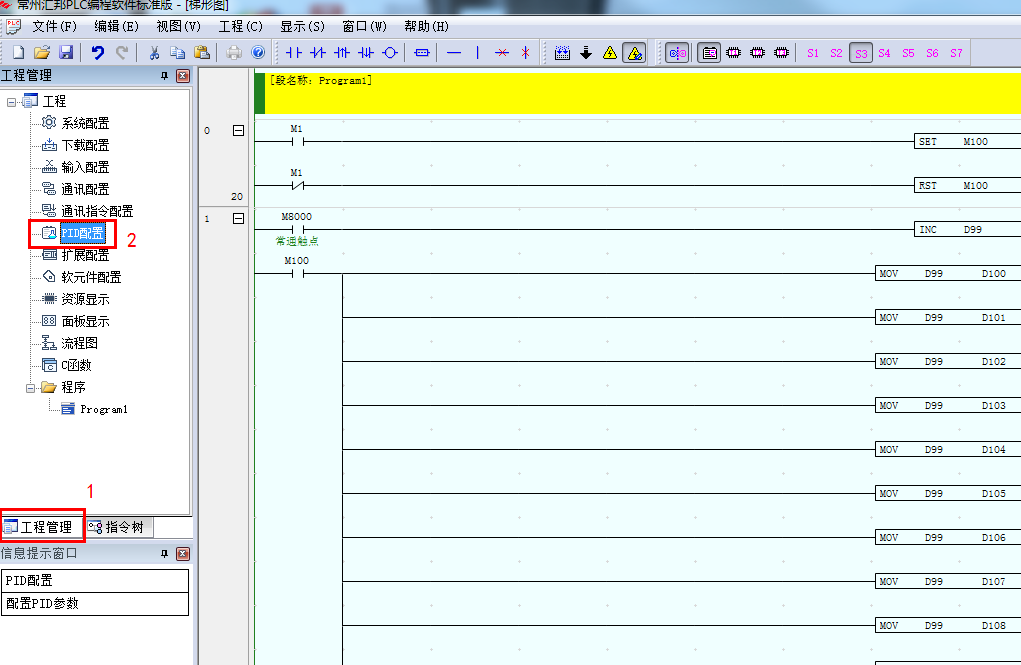
1.在電腦能夠給PLC正常下程序的情況下,鼠標雙擊“工程管理”里“PID配置”即可開始配置。
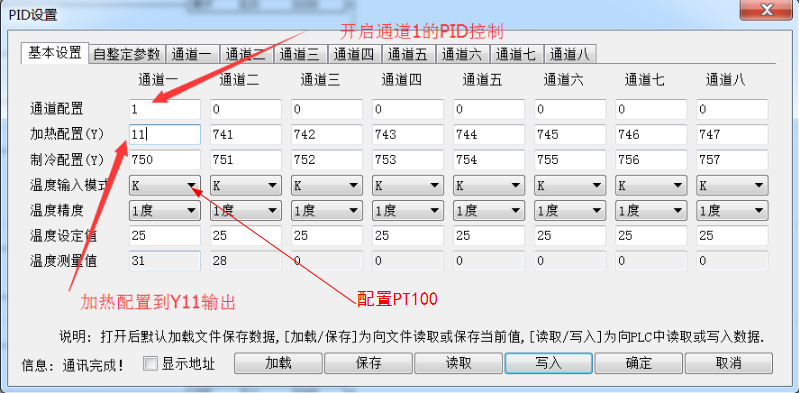
2.根據外部的硬件配置選擇對應的通道進行基本參數配置。
舉例:給通道1進行配置
對通道1的**通道配置**內輸入數字**1**表示打開通道(輸入數字0表示關閉通道);
假設外部硬件的固態加熱輸出為Y11,那么給通道1的**加熱配置**內輸入數字**11**表示配置的是Y11;
假設外部硬件的溫度輸入為熱電阻,客戶選擇的溫度傳感器為PT100,,那么給通道1的**溫度輸入模式**內選擇**PT100**即可;
溫度精度根據實際要求進行選擇,當通道1的基本配置完成后用鼠標再點擊最下方的“**寫入**”即可完成配置寫入,但要注意觀察左下角的信息提示,若顯示通訊完成表示寫入成功,若顯示通訊超時表示寫入失敗,請檢查通訊問題;
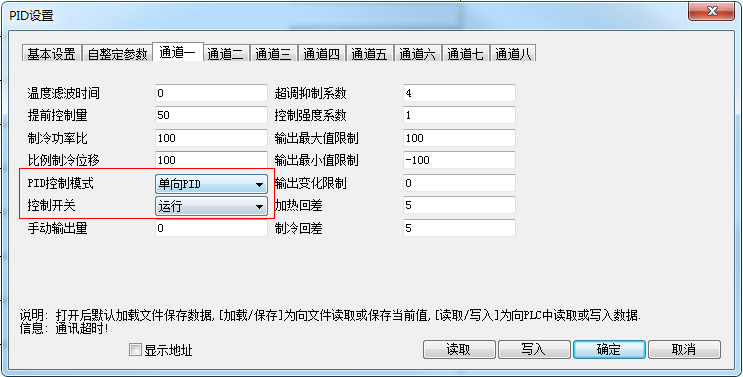
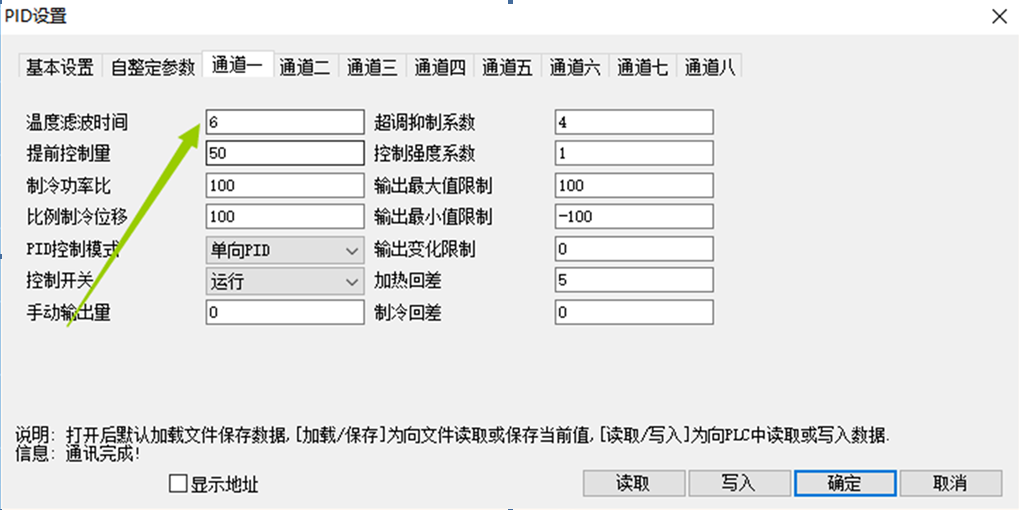
接著點擊對應的通道,對PID控制模式和控制開關進行配置,由于只需要加熱輸出那么PID控制模式選擇“**單向PID**”,
控制開關選擇“**運行**”,(只有選擇運行該通道才能自動控溫),最后就是點擊“寫入”然后點擊“**確定**”即可完成。
## PV外部來源模式:即不從測量板獲取PV值的PID控制配置方法
上文的配置過程為PV內部來源模式,下面開始PV外部來源模式
1. 將F0 - F7 的值設置為PV來源的D寄存器序號,大于1的值時:
① 將F0設為100時,將第一通道的PID控制器PV值從D100得到
② 將F1設為101時,將第二通道的PID控制器PV值從D101得到,其它類推。
2. 來源的D寄存器為有符號16位整數,占一個地址。
3. 配置為此模式時,本身測量的PV值就不參與PID運算,變的無意義了。
① 如第一通道的F505,第二通道的F569等,只要配置成外部來源就不再起作用,
② PV直接從你的D寄存器中取。
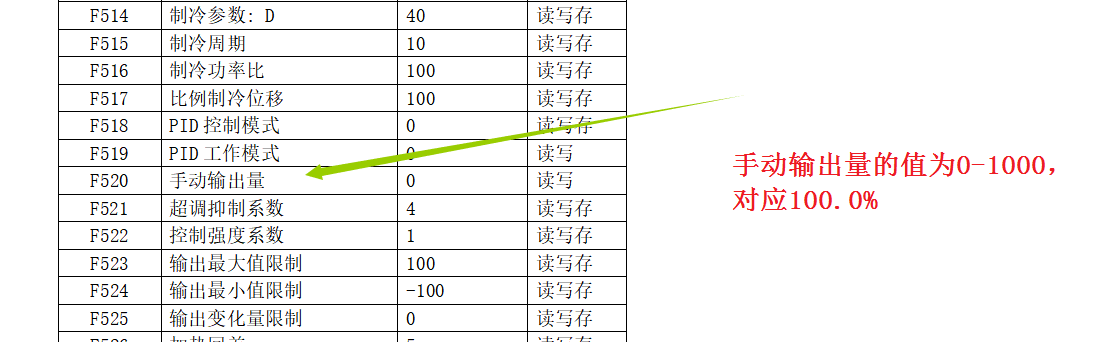
4. PV值為無小數點模式,如數據過來有小數點,則在SV也增加小數點
① 如PV有一個小數,100.0度時,D寄存器實現值為1000
② 這時,就要求SV值也是有小數點的,即配置1000時,即控制100.0度
5. 其它配置無變化
## **注:**
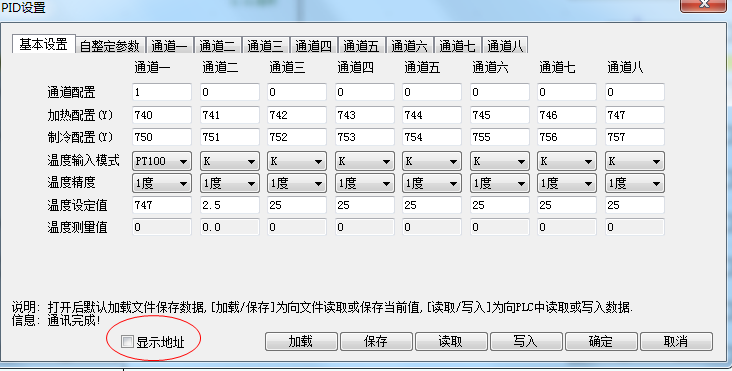
1.關于PID配置的地址為寄存器,查看具體每個參數的地址可以點擊PID設置界面左下角的“**顯示地址**”就可以了;
2.鎖碼配置:將對應通道的溫度濾波時間參數的功能改為鎖碼度數,輸入數字2就是鎖兩度,輸入5就是5度,和小數點配置無關。
3.關于自整定需要注意的是,打開自整定只需要對該寄存器的地址寫1即可,只需寫一次就可以了,但打開自整定不可以一直連續給該地址寫1,因為一旦打開自整定,當自整定結束后PLC會自動給自整定的地址寫一次0(關閉自整定),若打開自整定一直連續給該地址寫1會讓PLC自整定結束后又繼續重新開始自整定那就沒有意義了。
下圖是表示當M1導通的上升沿給通道1的自整定地址寫一次1,

4.關于手動輸出的配置
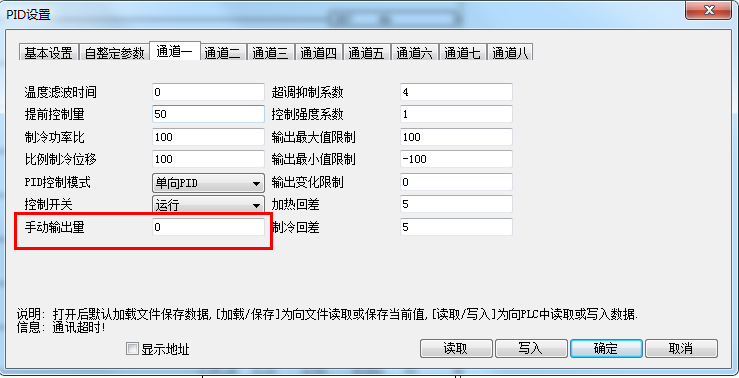
>注:配置完后只有進行下載程序才可以寫入觸摸一體機的plc中。
