### 單板PLC高速脈沖輸出使用說明
支持最多4路的高速脈沖輸出
建議最高64K輸出頻率,需測試看系統占用率,系統資源占用過大,會有問題。
如果程序比較簡單,也可以提高輸出頻率,極限是多少,要測試一下。
在有高速脈沖指令驅動端口時,Yn端口為脈沖輸出模式,改變Yn線圈狀態不影響實際輸出。
支持三條高速脈沖輸出指令:
1. PLSY/DPLSY:直接頻率脈沖輸出指令,用于直接按某個頻率進行輸出
2. PLSR/DPLSR:多段帶加減速脈沖輸出指令,用于驅動步進或伺服電機
3. PLSA/DPLSA:脈沖輸出配置指令,用于改變當前的輸出狀態,當前未處于輸出狀態無效
特殊寄存器和特殊線圈占用:

當前段輸出量:顯示本段已輸出的脈沖量,在下段開始時清零。
當前輸出狀態:指示脈沖輸出口的工作狀態,在輸出時為1,輸出完成或未輸出時為0
### 指令使用說明
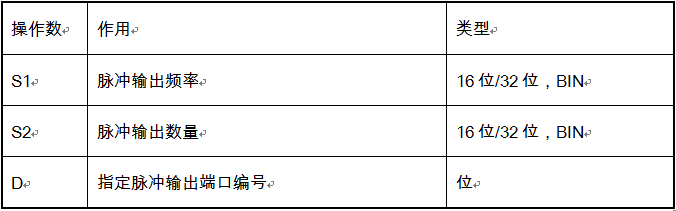
**PLSY**:直接頻率脈沖輸出指令,指令有三個參數。
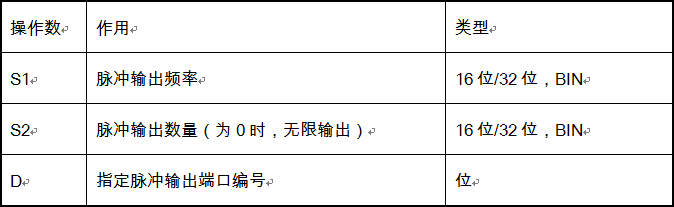
① 本指令支持雙字模式,即DPLSY指令,參數都是雙字。
② 本指令支持對同一端口進行多次驅動,
1) 輸出狀態以最后一次驅動為準。
2) 只要有一條驅動指令斷開,立即停止輸出。
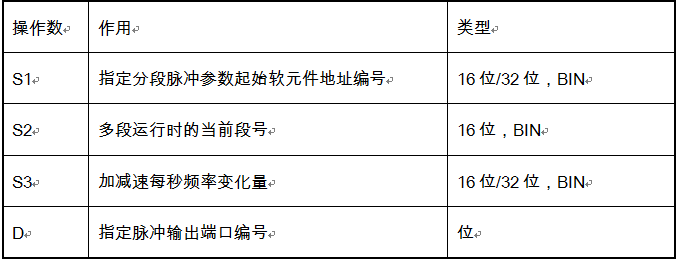
**PLSR/DPLSR**:直接頻率脈沖輸出指令,指令有四個參數。
示例程序如下,本例為6段加減速脈沖輸出,完成后延時5秒,再次啟動6段輸出:
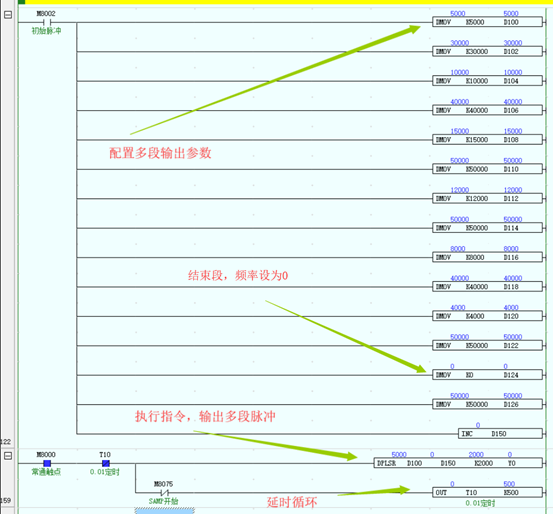
1. 參數地址是以Dn為起始地址的一段區域。(16位指令形式):D100設定第1段脈沖的最高頻率、D101設定第1段脈沖的個數,D102設定第2段脈沖的最高頻率、D103設定第2段脈沖的個數,…… 以Dn設定第(n+2)/2段脈沖的最高頻率、當脈沖頻率設定為0表示分段結束,一共設定了(n+2)/2-1段脈沖;段數不受限制。
2.上例對32位指令DPLSR,D100(雙字)設定第1段脈沖的最高頻率、D102(雙字)設定第1段脈沖的個數,D104(雙字)設定第2段脈沖的最高頻率、D106(雙字)設定第2段脈沖的個數……以Dn設定第(n+4)/4段脈沖的最高頻率、當脈沖頻率設定為0表示分段結束,一共設定了(n+4)/4-1段脈沖;段數不受限制。
3.加減速時間是指從開始到第一段最高頻率的加速時間,同時也定義了所有段的頻率與時間的斜率,從而后面的加減速都按照這個斜率來加速/減速。
4. 脈沖只可在Y0或Y1或Y2或Y3輸出。
5.頻率范圍: 0~32767Hz(16位指令)、0~200KHz(32位指令)。
6.脈沖個數范圍:K0~K32,767(16位指令)、K0~K2,147,483,647(32位指令)。
7.加減速時間范圍:0~65535 ms。
注意:當為n段脈沖時,第1段、第2段、第3段……第n段每段的脈沖頻率和脈沖數的地址必須是依次連續的,且第n+1段的脈沖頻率地址必須為0,用來判斷脈沖段是否結束;加減速時間的地址不能夠緊跟在第n段后面。
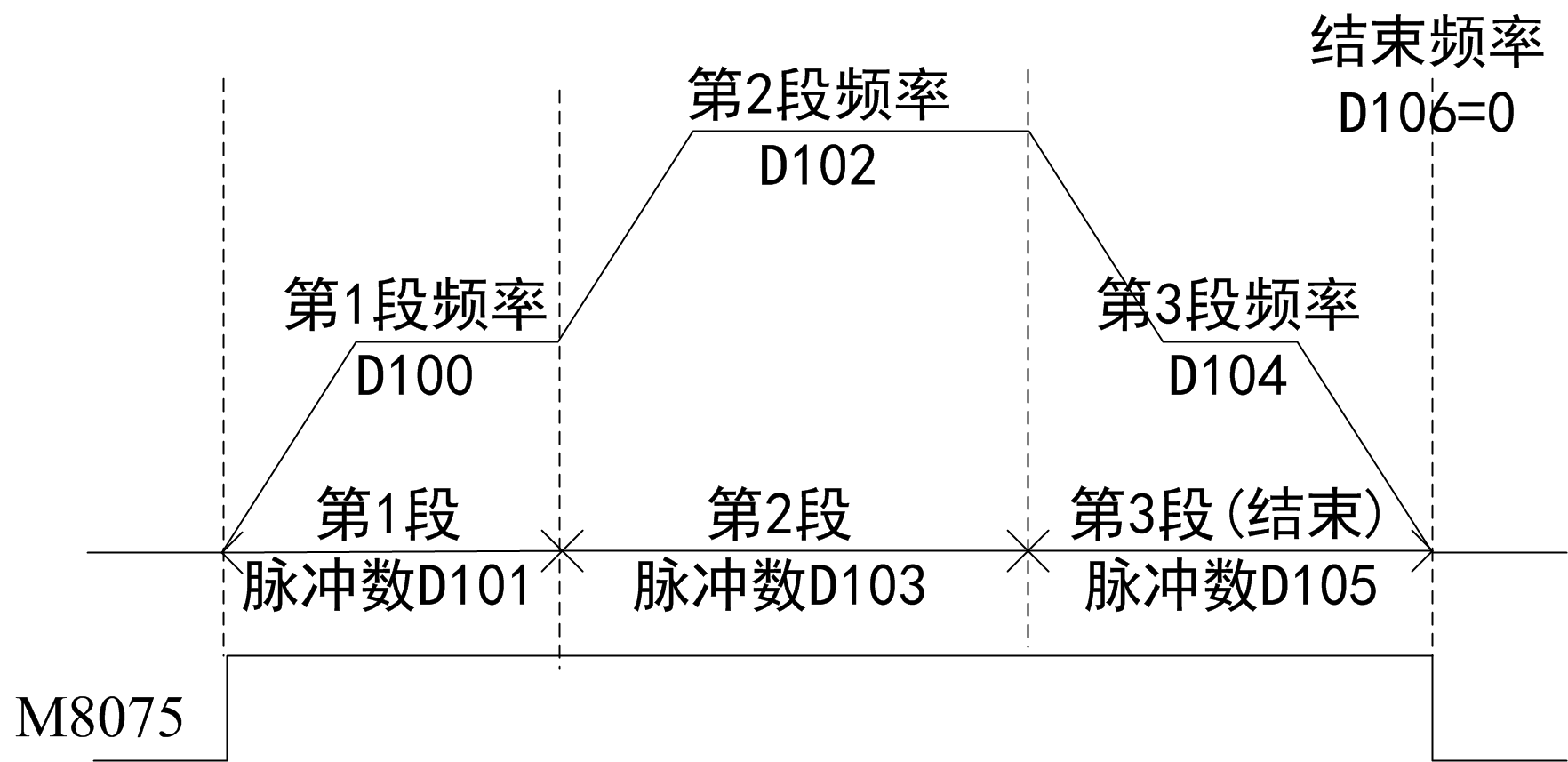
如上圖所示:
1. 每段的頻率值為穩定后平的那一段
2. 每段的脈沖數為加減速段加上穩定段的總和
3. 結束段輸出脈沖包含了從上一個頻率轉換到當前段頻率的加減速過程,還包含了從本段頻率降到0停止的脈沖,此段含有兩個加減速過程。
4. 多段脈沖輸出,要處理好加減速過程的脈沖數配置:
(1) 如果本段的加減速過程已要占用了全部的輸出脈沖數,則本段就沒有穩定狀態,全部為加減速。
(2) 如果連續兩段的脈沖數都不足以實現加減速過程,則這兩段的勻速狀態都不會出現,感覺就像是一個在加減速過程中,跳過了兩兩段。
(3) 如果到最后一段的脈沖數,不足以支持到減速為零,會出生發送脈沖過程中忽然停止,單段使用不存在此問題。
**PLSA/DPLSA**:脈沖輸出配置指令,用于改變當前的輸出狀態,當前未處于輸出狀態無效。
① 本指令的主要作用是在條件未知時,啟動脈沖輸出,當條件達成時,改變輸出狀態,實現指定功能。
② 可以實時改變正在運行中的脈沖輸出狀態,達到動態調整。
③ PLSY和PLSR指令驅動后,處于脈沖輸出狀態時,才能執行本指令
④ 本指令執行后,會直接替代當前正在執行的段,重新進行脈沖數計量。
⑤ PLSY執行直接改變頻率,PLSR執行時帶加減速功能。
## 注:高速脈沖輸出只能放在Y0-Y3上,所以程序驅動時只能配置為Y0-Y3。
