https://zhuanlan.zhihu.com/p/59788528
https://mp.weixin.qq.com/s/wiqfcVrsLgLvLbsTU-qSag
## B樹
一棵m階的B-Tree有如下特性
1. 每個節點最多有m個孩子,m稱為b樹的階
2. 除了根節點和葉子節點外,其它每個節點至少有Ceil(m/2)個孩子
3. 若根節點不是葉子節點,則至少有2個孩子
4. 所有葉子節點都在同一層,且不包含其它關鍵字信息
5. 每個非終端節點包含n個關鍵字(健值)信息
6. 關鍵字的個數n滿足:ceil(m/2)-1 <= n <= m-1
7. ki(i=1,…n)為關鍵字,且關鍵字升序排序
8. Pi(i=1,…n)為指向子樹根節點的指針。P(i-1)指向的子樹的所有節點關鍵字均小于ki,但都大于k(i-1)
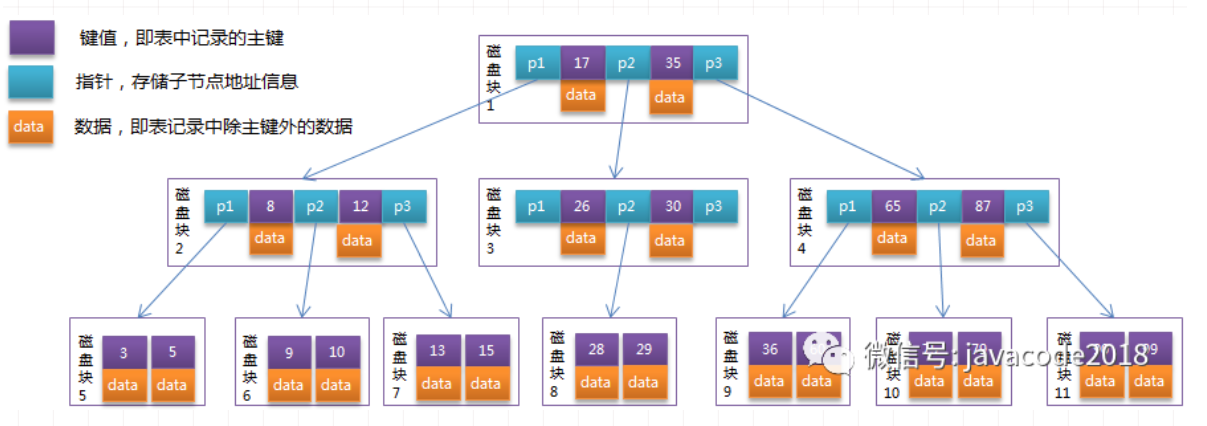
每個節點占用一個盤塊的磁盤空間,**一個節點上有兩個升序排序的關鍵字和三個指向子樹根節點的指針,指針存儲的是子節點所在磁盤塊的地址**。兩個鍵將數據劃分成的三個范圍域,對應三個指針指向的子樹的數據的范圍域。以根節點為例,關鍵字為17和35,P1指針指向的子樹的數據范圍為小于17,P2指針指向的子樹的數據范圍為17~35,P3指針指向的子樹的數據范圍為大于35
模擬查找關鍵字29的過程:
1. 根據根節點找到磁盤塊1,讀入內存。【磁盤I/O操作第1次】
2. 比較關鍵字29在區間(17,35),找到磁盤塊1的指針P2
3. 根據P2指針找到磁盤塊3,讀入內存。【磁盤I/O操作第2次】
4. 比較關鍵字29在區間(26,30),找到磁盤塊3的指針P2
5. 根據P2指針找到磁盤塊8,讀入內存。【磁盤I/O操作第3次】
6. 在磁盤塊8中的關鍵字列表中找到關鍵字29
分析上面過程,發現需要3次磁盤I/O操作,和3次內存查找操作,由于內存中的關鍵字是一個有序表結構,可以利用二分法快速定位到目標數據,而3次磁盤I/O操作是影響整個B-Tree查找效率的決定因素。
**B-不利于范圍查找,比如上圖中我們需要查找\[15,36\]區間的數據,需要訪問7個磁盤塊(1/2/7/3/8/4/9),io次數又上去了,范圍查找也是我們經常用到的,所以b-樹也不太適合在磁盤中存儲需要檢索的數據。**
## B+樹
#### **b+樹的特征**
1.每個結點至多有m個子女
2.除根結點外,每個結點至少有\[m/2\]個子女,根結點至少有兩個子女
3.有k個子女的結點必有k個關鍵字
4.父節點中持有訪問子節點的指針
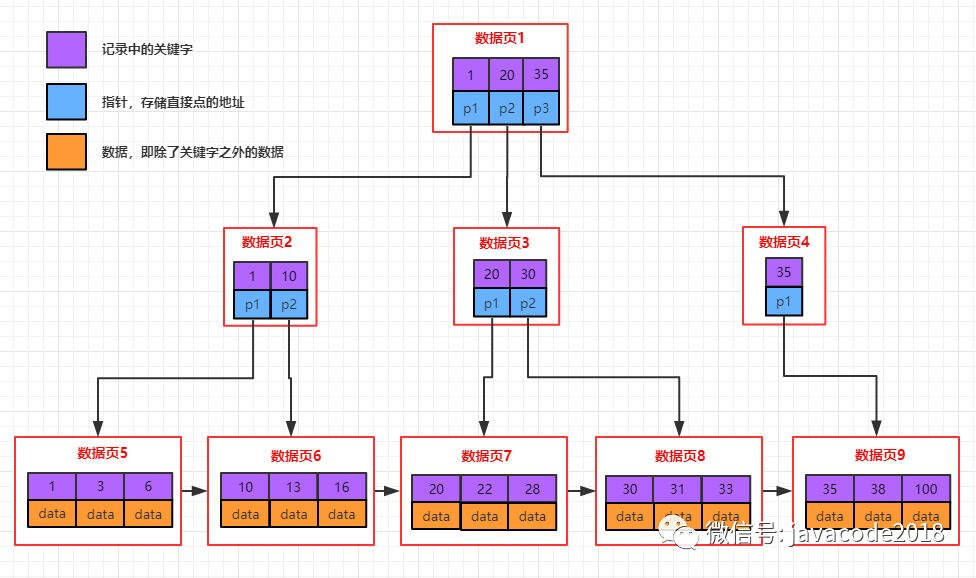
5.父節點的關鍵字在子節點中都存在(如上面的1/20/35在每層都存在),要么是最小值,要么是最大值,如果節點中關鍵字是升序的方式,父節點的關鍵字是子節點的最小值
6.最底層的節點是葉子節點
7.除葉子節點之外,其他節點不保存數據,只保存關鍵字和指針
8.葉子節點包含了所有數據的關鍵字以及data,葉子節點之間用鏈表連接起來,可以非常方便的支持范圍查找
#### **b+樹與b-樹的幾點不同**
##### **核心區別:**
B+樹只有**最底層**的**葉子節點**才**保存數據**,其他的都是非葉子節點,只保存關鍵字和指針,這樣使得**非葉子節點存儲的數據更多**,使樹變矮,這樣內存中可以**存儲更多的指針**,**減少磁盤IO**
b+樹中一個節點如果有k個關鍵字,最多可以包含k個子節點(k個關鍵字對應k個指針);而b-樹對應k+1個子節點(多了一個指向子節點的指針)
b+樹除葉子節點之外其他節點值存儲關鍵字和指向子節點的指針,而b-樹還存儲了數據,這樣同樣大小情況下,b+樹可以存儲更多的關鍵字
b+樹葉子節點中存儲了所有關鍵字及data,并且多個節點用鏈表連接,從上圖中看子節點中數據從左向右是有序的,這樣快速可以支撐范圍查找(先定位范圍的最大值和最小值,然后子節點中依靠鏈表遍歷范圍數據)
#### **B-Tree和B+Tree該如何選擇?**
B-Tree因為非葉子結點也保存具體數據,所以在查找某個關鍵字的時候找到即可返回。而B+Tree所有的數據都在葉子結點,每次查找都得到葉子結點。所以在同樣高度的B-Tree和B+Tree中,B-Tree查找某個關鍵字的效率更高。
由于B+Tree所有的數據都在葉子結點,并且結點之間有指針連接,在找大于某個關鍵字或者小于某個關鍵字的數據的時候,B+Tree只需要找到該關鍵字然后沿著鏈表遍歷就可以了,而B-Tree還需要遍歷該關鍵字結點的根結點去搜索。
由于B-Tree的每個結點(這里的結點可以理解為一個數據頁)都存儲主鍵+實際數據,而B+Tree非葉子結點只存儲關鍵字信息,而每個頁的大小有限是有限的,所以同一頁能存儲的B-Tree的數據會比B+Tree存儲的更少。這樣同樣總量的數據,B-Tree的深度會更大,增大查詢時的磁盤I/O次數,進而影響查詢效率。
