
# 三、Lars-DNS Service開發
## **1) 簡介**
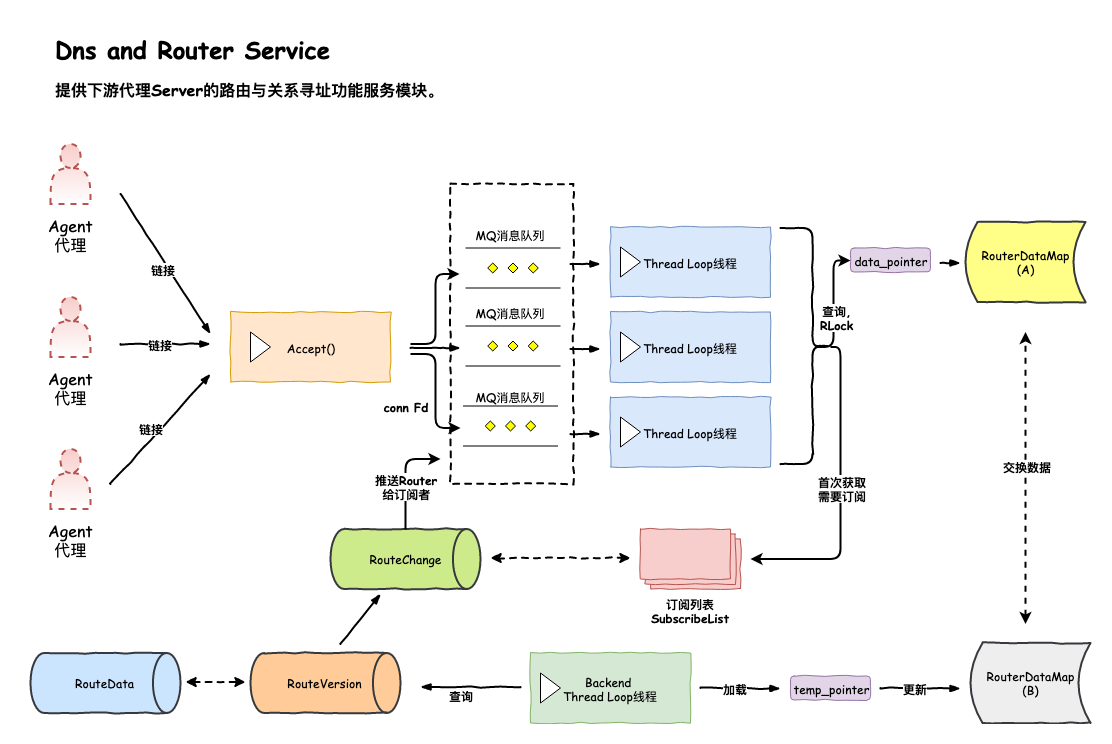
負責接收各agent對某modid、cmdid的請求并返回該modid、cmdid下的所有節點,即為agent提供獲取路由服務
### 1.1 架構
### **1.2 網絡模塊**
? DnsService服務模型采用了one loop per thread TCP服務器,主要是基于Lars-Reactor:
- 主線程Accepter負責接收連接(agent端連接)
- Thread loop們負責處理連接的請求、回復;(agent端發送查詢請求,期望獲取結果)
### **1.3 雙map模型**
? DnsServer使用兩個map存儲路由數據(key = `modid<<32 + cmdid` , value = set of `ip<<32 + port`)
- 一個`RouterDataMap_A`:主數據,查詢請求在此map執行
- 另一個`RouterDataMap_B`:后臺線程周期性重加載路由到此map,作為最新數據替換掉上一個map
這兩個map分別由指針`data_pointer`與`temp_pointer`指向.
### 1.4 Backend Thread守護線程
**dns service還有個業務線程:**
1、負責周期性(default:1s)檢查`RouteVersion`表版本號,如有變化,說明`RouteData`有變更,則重加載`RouteData`表內容;然后將`RouteChange`表中被變更的`modid`取出,根據訂閱列表查出`modid`被哪些連接訂閱后,向所有工作線程發送任務:要求訂閱這些`modid`的連接推送`modid`路由到agent
2、此外,還負責周期性(default:8s)重加載`RouteData`表內容
**PS:重加載`RouteData`表內容的細節**
重加載`RouteData`表內容到`temp_pointer`指向的`RouterDataMap_B`,而后上寫鎖,交換指針`data_pointer`與`temp_pointer`的地址,于是完成了路由數據更新
### **主業務**
1. 服務啟動時,`RouteData`表被加載到`data_pointer`指向的`RouterDataMap_A`中, `temp_pointer`指向的`RouterDataMap_B`為空
2. 服務啟動后,agent發來Query for 請求某`modid/cmdid`,到其所在Thread Loop上,上讀鎖查詢`data_pointer`指向的`RouterDataMap_A`,返回查詢結果;
3. 如果此`modid/cmdid`不存在,則把`agent ip+port`+`moid/cmdid`發送到Backend thread loop1的隊列,讓其記錄到ClientMap
后臺線程Backend thread每隔10s清空`temp_pointer`指向的`RouterDataMap_B`,再加載`RouteData`表內容到`temp_pointer`指向的`RouterDataMap_B`,加載成功后交換指針`data_pointer`與`temp_pointer`指針內容,于是完成了路由數據的更新.
---
### 關于作者:
作者:`Aceld(劉丹冰)`
mail: [danbing.at@gmail.com](mailto:danbing.at@gmail.com)
github: [https://github.com/aceld](https://github.com/aceld)
原創書籍: [http://www.hmoore.net/@aceld](http://www.hmoore.net/@aceld)

>**原創聲明:未經作者允許請勿轉載, 如果轉載請注明出處**
- 一、Lars系統概述
- 第1章-概述
- 第2章-項目目錄構建
- 二、Reactor模型服務器框架
- 第1章-項目結構與V0.1雛形
- 第2章-內存管理與Buffer封裝
- 第3章-事件觸發EventLoop
- 第4章-鏈接與消息封裝
- 第5章-Client客戶端模型
- 第6章-連接管理及限制
- 第7章-消息業務路由分發機制
- 第8章-鏈接創建/銷毀Hook機制
- 第9章-消息任務隊列與線程池
- 第10章-配置文件讀寫功能
- 第11章-udp服務與客戶端
- 第12章-數據傳輸協議protocol buffer
- 第13章-QPS性能測試
- 第14章-異步消息任務機制
- 第15章-鏈接屬性設置功能
- 三、Lars系統之DNSService
- 第1章-Lars-dns簡介
- 第2章-數據庫創建
- 第3章-項目目錄結構及環境構建
- 第4章-Route結構的定義
- 第5章-獲取Route信息
- 第6章-Route訂閱模式
- 第7章-Backend Thread實時監控
- 四、Lars系統之Report Service
- 第1章-項目概述-數據表及proto3協議定義
- 第2章-獲取report上報數據
- 第3章-存儲線程池及消息隊列
- 五、Lars系統之LoadBalance Agent
- 第1章-項目概述及構建
- 第2章-主模塊業務結構搭建
- 第3章-Report與Dns Client設計與實現
- 第4章-負載均衡模塊基礎設計
- 第5章-負載均衡獲取Host主機信息API
- 第6章-負載均衡上報Host主機信息API
- 第7章-過期窗口清理與過載超時(V0.5)
- 第8章-定期拉取最新路由信息(V0.6)
- 第9章-負載均衡獲取Route信息API(0.7)
- 第10章-API初始化接口(V0.8)
- 第11章-Lars Agent性能測試工具
- 第12章- Lars啟動工具腳本