

精化是指激光雷達點云精度改善,精化模塊是Alundar Platform軟件提供的獨特的點云精度改善模塊,目的是通過不同航帶/條帶或者不同架次的點云同名匹配,建立同名約束進行平差,修復點云的內部不一致性,使同一地物趨于吻合;同時,可以在平差中加入地面控制點,提高點云的絕對精度。說明:奧倫達CBI系列硬件系統采集的數據可達到10cm絕對精度,可滿足常規區域1:1000、1:2000大比例尺和山區1:500大比例尺地形圖制作,基本無需精化即可滿足項目需求;在精度要求較高的情況下,如需要絕對精度優于5cm,則可以采用精化后處理方式獲得。
#### 航帶分割
功能:按航向和時間將點云分割為若干小段,對點云數據進行航帶分割預處理,處理后的各小段點云被用于航帶匹配。
**步驟**:
1. 點擊按鈕,彈出航帶分割設置界面。
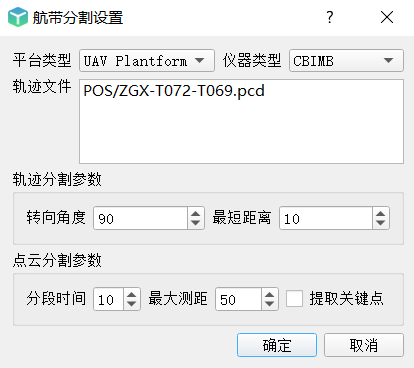
無人機平臺參數設置界面
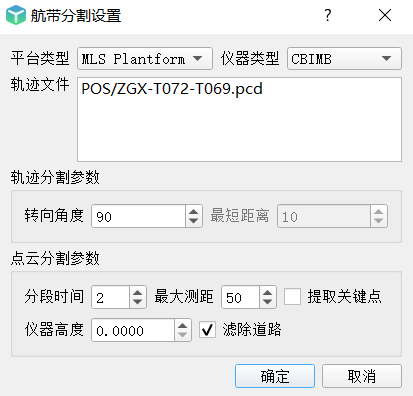
車載平臺參數設置界面
2\. 設置航帶分割參數,點擊“確定”。
參數設置:
平臺類型:無人機平臺和車載平臺,不同平臺類型方式處理過程有差異。
轉向角度:(默認為90度)大于轉向角度時進行分段分割。
最短距離:(默認為10米)應用于無人機平臺,分割后短距離航帶的點云被剔除。
分段時間:(無人機平臺默認為10秒,車載平臺默認為2秒)大于分段時間時進行分段分割。
最大測距:(默認為50米)大于最大測距的點被剔除。
提取關鍵點:是否提取出特征變化顯著的點,一般適用于地形起伏較大的丘陵和山地地形分割匹配。
儀器高度:(默認為0米)應用于車載平臺,POS系統幾何中心到地面的垂直距離,小于等于0時會自動計算。
濾除道路:應用于車載平臺,分割后道路面點云被剔除。
#### 航帶匹配
**功能:**在航帶分割后,檢測重疊區域進行自動匹配獲得同名對應。
**步驟**:
1. 點擊按鈕,彈出航帶匹配設置界面。

1. 設置航帶匹配參數,點擊“確定”。
參數設置:
平臺類型:無人機平臺和車載平臺,不同平臺類型方式處理過程有差異。
僅當前項目:當前項目不同航帶間匹配。
操作多項目:不同項目之間或者同一項目不同航帶之間進行匹配。
搜索半徑:(默認為1.0米)航帶之間匹配的同名對應搜索范圍。當點云精度較差時,可以增大搜索半徑。
匹配時間相鄰:用于前后相鄰幀具有重疊的情況。
點到面距離:距離最小準則,默認為點到點距離最小準則。
利用關鍵點:是否利用特征變化顯著的點進行匹配,一般適用于地形起伏較大的丘陵和山地地形分割匹配。
#### 航帶平差
**功能:**利用重疊點云對位姿和進行優化和約束,提高精度。
步驟:
1\. 點擊按鈕,彈出航帶平差設置界面。
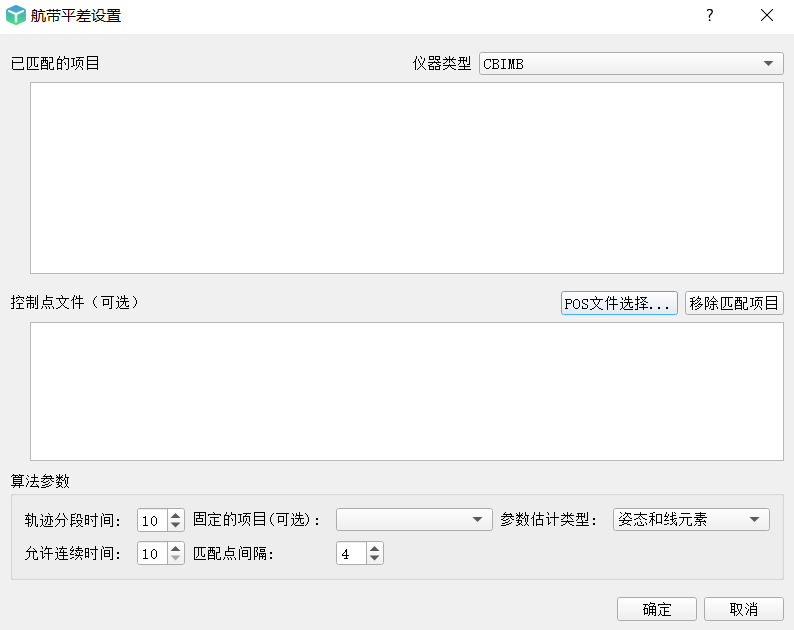
2\. 設置航帶平差參數,點擊“確定”。
參數設置:
軌跡分段時間:(默認為10s)大于分段時間時進行分段分割。
允許連續時間:(默認為10s)允許多長時間內軌跡上不存在匹配點。
匹配點間隔:(默認為4m)重采樣間隔,選取重采樣后的匹配點用于航帶平差。匹配點間隔越小,計算時間越長。
參數估計類型:對姿態和線元素參數估計進行選擇。
固定的項目:當存在兩個以上項目時,可選擇一個項目作為固定的項目,固定項目不被改變。
平差結束后,精度結果顯示在信息輸出窗口:

5個數值分別表示:x軸向、y軸向、z軸向、xoy平面、3D距離的均方根誤差。
#### 點云修正
**功能:**根據航帶平差結果對點云進行修正。
步驟:
1\. 點擊按鈕,彈出點云修正設置界面。
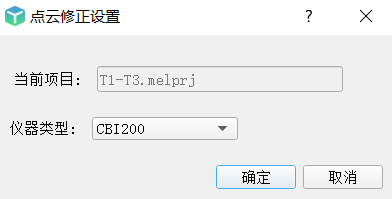
2\. 設置點云修正參數,點擊“確定”。
參數設置:
儀器類型:根據點云數據選擇對應的儀器類型。
- 概況
- 安裝與激活
- 軟件安裝
- 軟件購買及激活方法
- 在線激活
- 加密狗激活
- 系統備份和恢復
- 用戶登錄
- 模塊介紹
- 項目管理模塊
- 工作空間
- 項目
- 添加文件
- 更改文件
- 加載點云
- 停止任務
- 析出數據
- 文件屬性查看
- 選項
- 快捷操作
- 渲染模塊
- 渲染模式
- 點云顯示類型
- 軌跡顯示類型
- 顯示與定位
- 渲染設置
- 渲染視圖
- 編輯模塊
- 編輯模式
- 局部視圖
- 擴展選擇
- 選點類型
- 點操作
- 量測
- 保存編輯
- 控制點編輯
- 工具模塊
- 重采樣類型
- 按時間截取
- 數據分段
- 點云配準
- RGB更改
- 點云解析
- 精化模塊
- 精化方法
- 結果查看
- 分類模塊
- 分類方法
- 地物提取
- 電力模塊
- 添加文件
- 桿塔標記
- 電力切檔
- 電線補點
- 精細分類
- 矢量化
- 樹障分析
- 精細巡檢
- 視圖模塊
- 窗口視圖
- 軌跡管理器
- 主題
- 附錄