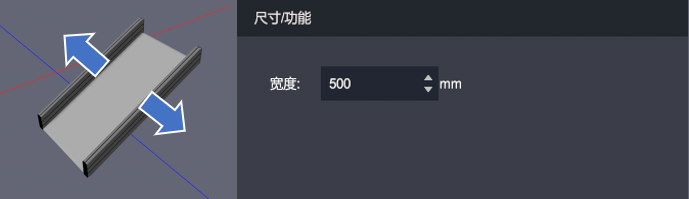
## PV小皮帶
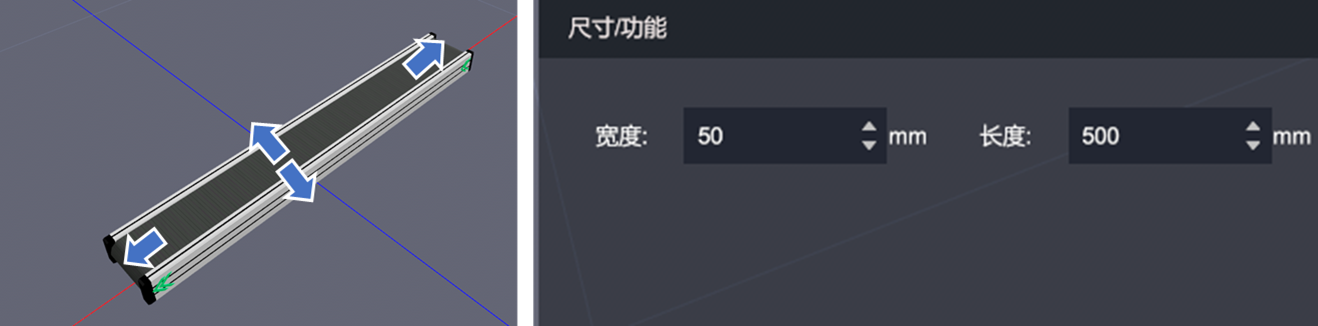
**參數尺寸:**
> 寬度為50~600mm,長度為100~9999mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
## PV大皮帶

**參數尺寸:**
> 寬度為500~1000mm,長度為1000~3000mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
## PV雙皮帶
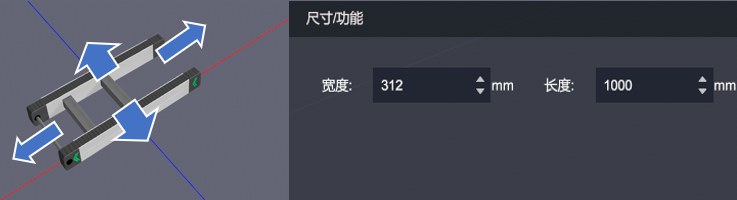
**參數尺寸:**
> 寬度為300~800mm,長度為1000~3000mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
## 完美傳輸帶

**參數尺寸:**
> 寬度為100~300mm,長度為500~2000mm,高度為10~15mm,透明度為0~100%
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
## GT滾筒
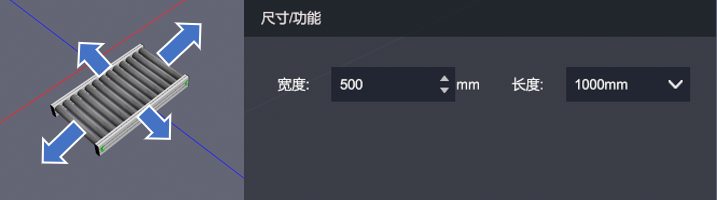
**參數尺寸:**
> 寬度為500~1000mm,長度為1000~3000mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
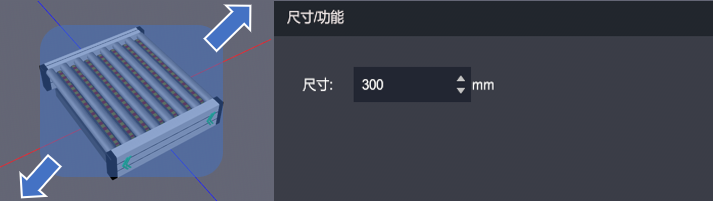
## 十字轉向-300
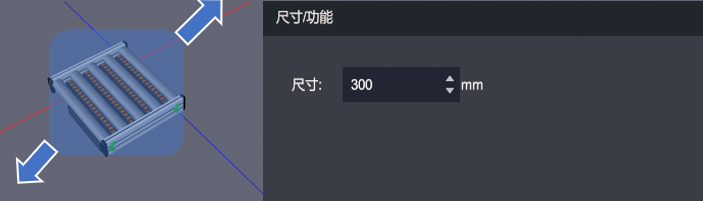
**參數尺寸:**
>尺寸為300~500mm(整體呈比例增大縮小)
**控制接口:**
> * X使能:DO接口,打開后X方向傳輸帶開始轉動;
> * X方向:DO接口,打開后傳輸帶向X反方向運動;
> * X速度控制:F32輸出接口,控制X方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
> * Y氣缸使能:F32輸出接口,打開后Y軸運輸帶被抬起;
> * Y使能:DO接口,打開后Y方向傳輸帶開始轉動;
> * Y方向:DO接口,打開后傳輸帶向Y反方向運動;
> * Y速度控制:F32輸出接口,控制Y方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
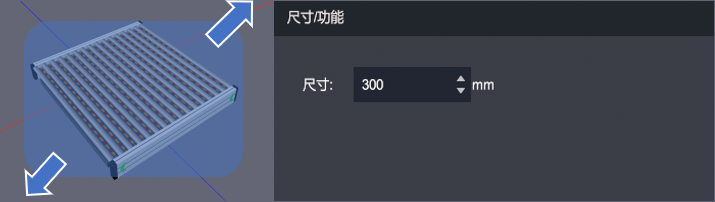
## 十字轉向-500
**參數尺寸:**
>尺寸為500~1000mm(整體呈比例增大縮小)
**控制接口:**
> * X使能:DO接口,打開后X方向傳輸帶開始轉動;
> * X方向:DO接口,打開后傳輸帶向X反方向運動;
> * X速度控制:F32輸出接口,控制X方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
> * Y氣缸使能:F32輸出接口,打開后Y軸運輸帶被抬起;
> * Y使能:DO接口,打開后Y方向傳輸帶開始轉動;
> * Y方向:DO接口,打開后傳輸帶向Y反方向運動;
> * Y速度控制:F32輸出接口,控制Y方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
## 十字轉向-1000
**參數尺寸:**
>尺寸為1000~1500mm(整體呈比例增大縮小)
**控制接口:**
> * X使能:DO接口,打開后X方向傳輸帶開始轉動;
> * X方向:DO接口,打開后傳輸帶向X反方向運動;
> * X速度控制:F32輸出接口,控制X方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
> * Y氣缸使能:F32輸出接口,打開后Y軸運輸帶被抬起;
> * Y使能:DO接口,打開后Y方向傳輸帶開始轉動;
> * Y方向:DO接口,打開后傳輸帶向Y反方向運動;
> * Y速度控制:F32輸出接口,控制Y方向傳輸帶速度,為0~10,傳輸帶運行速度設置;
## 阻擋氣缸
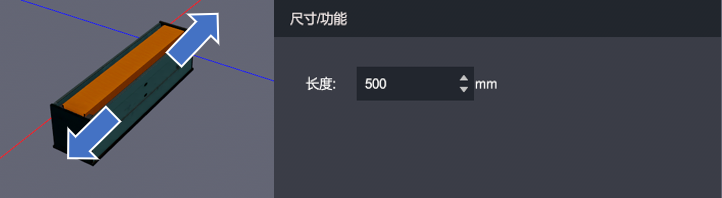
**參數尺寸:**
>長度為500mm(具體長度視傳輸帶寬度而定)
**控制接口:**
> * 使能:DO接口,打開后阻擋板升起;
> * 阻擋反饋:DI接口,當物體與阻擋板接觸時,模擬控制中阻擋反饋圖標亮起;
## 滾動阻擋器
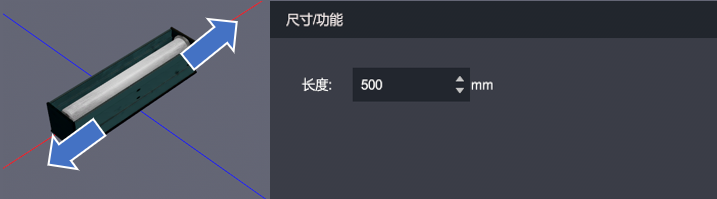
**參數尺寸:**
>長度為500mm(具體長度視傳輸帶寬度而定)
**控制接口:**
> * 使能:DO接口,打開后滾動阻擋板升起;
## 斜坡滑臺
**參數尺寸:**
>寬度為500~1000mm
## 紙箱封裝機
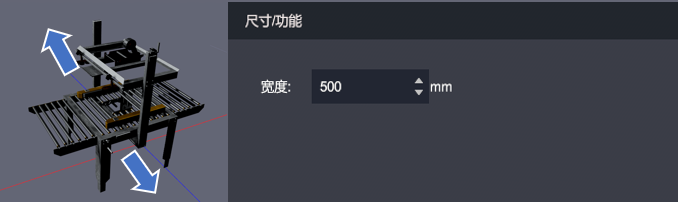
**參數尺寸:**
>寬度為500mm或1000mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,控制傳輸帶速度;
> * 光電反饋:DI接口,當光電檢測到物體時,反饋圖標亮起;
> * 盒蓋使能:DO接口,打開后進行盒蓋封裝;
## 1000升降傳輸

**參數尺寸:**
>寬度為500mm、1000mm、1500mm、2000mm
**控制接口:**
> * 電機:電機接口,打開后控制電機使傳輸帶上下運動;
> * 高能反饋:F32輸入接口,反饋上升距離;
> * 皮帶使能:DO接口,打開后皮帶運行;
> * 皮帶方向:DO接口,打開后皮帶方向反向;
> * 皮帶速度:F32輸出接口,為0~10,控制皮帶速度;
> * 下限為反饋:DI接口,物料到達下限位時,反饋圖標亮起;
> * 上限為反饋:DI接口,物料到達上限位時,反饋圖標亮起;
> * 光電檢測:DI接口,檢測到物料時,反饋圖標亮起;
## 傳輸擋板
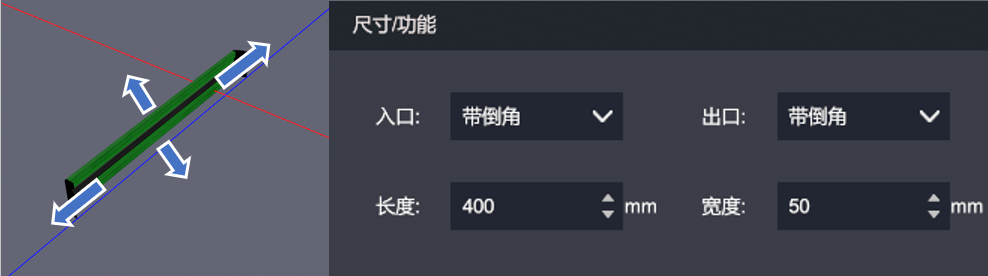
**參數尺寸:**
>入口、出口:帶倒角或不帶倒角
>長度為0~9999mm,寬度為50~100mm
## 裝夾90塊
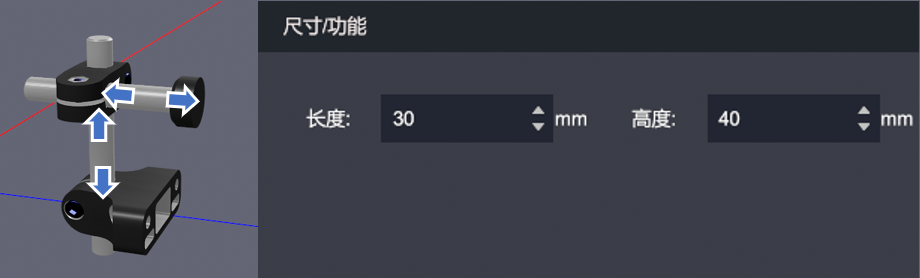
**參數尺寸:**
>長度為30~50mm,高度為20~50mm
## 微傳輸架

**參數尺寸:**
>寬度為30~50mm,高度為500~1000mm
## H輸送架

**參數尺寸:**
>寬度為500~100mm,高度為500~1000mm
##定位氣缸S
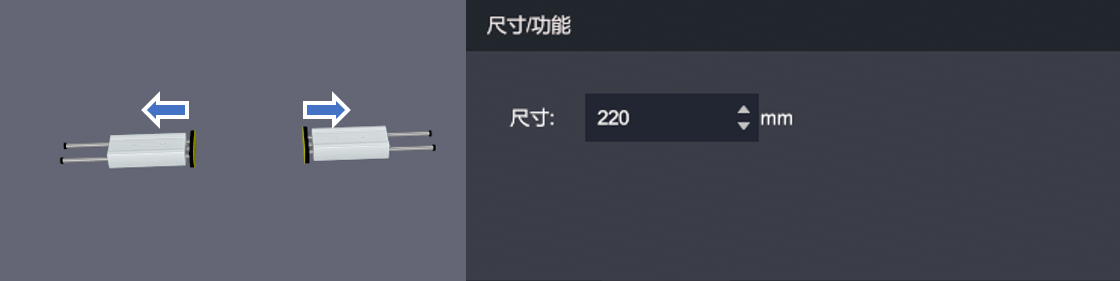
**參數尺寸:**
>尺寸為220~350mm,(此處尺寸為氣缸定位間的距離)
**控制接口:**
> * 氣缸使能:DO接口,打開后氣缸使能夾緊物體;
> * 負霍爾反饋:DI接口,當氣缸未夾住物體時,模擬控制的負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸使能夾住物體時,模擬控制的正霍爾反饋圖標亮起;
##定位氣缸M
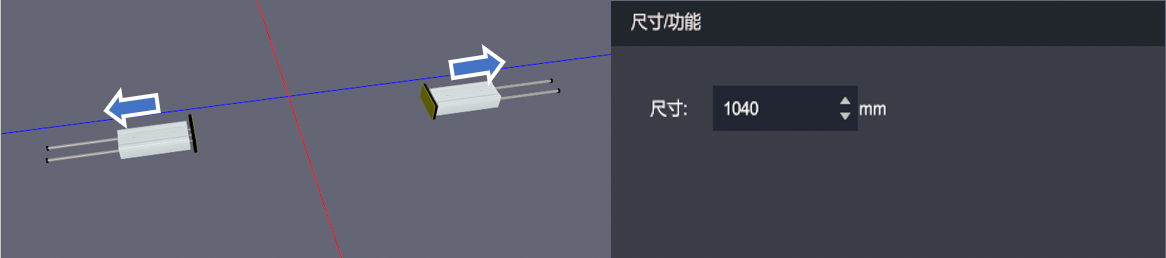
**參數尺寸:**
>尺寸為1000~9999mm,(此處尺寸為氣缸定位間的距離)
**控制接口:**
> * 氣缸使能:DO接口,打開后氣缸使能夾緊物體;
> * 負霍爾反饋:DI接口,當氣缸未夾住物體時,模擬控制的負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸使能夾住物體時,模擬控制的正霍爾反饋圖標亮起;
##PV90轉向-100
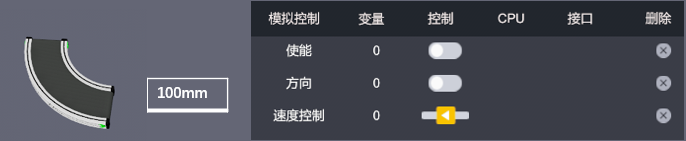
**參數尺寸:**
>寬度為固定數值100mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
##PV90轉向-200
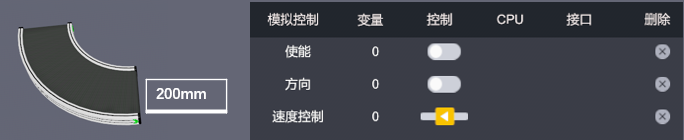
**參數尺寸:**
>寬度為固定數值200mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
##PV90轉向-300

**參數尺寸:**
>寬度為固定數值300mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
##PV90轉向-400
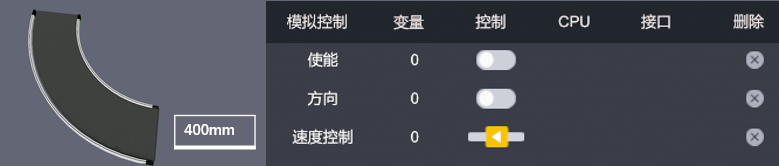
**參數尺寸:**
>寬度為固定數值400mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
##PV90轉向-500
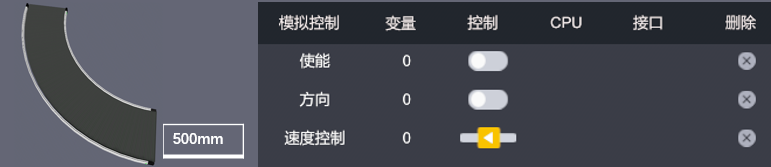
**參數尺寸:**
>寬度為固定數值500mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
##PV90轉向-1000
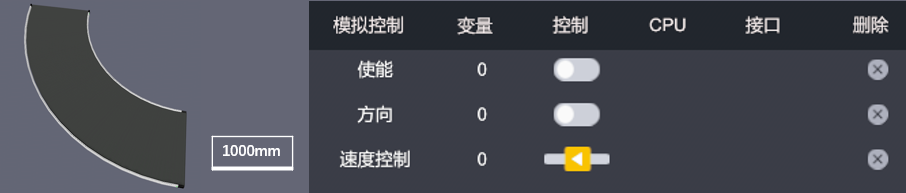
**參數尺寸:**
>寬度為固定數值1000mm
**控制接口:**
> * 使能:DO接口,打開后傳輸帶開始轉動;
> * 方向:DO接口,打開后傳輸帶方向反向;
> * 速度:F32輸出接口,為0~10,傳輸帶運行速度設置;
