## 推桿氣缸
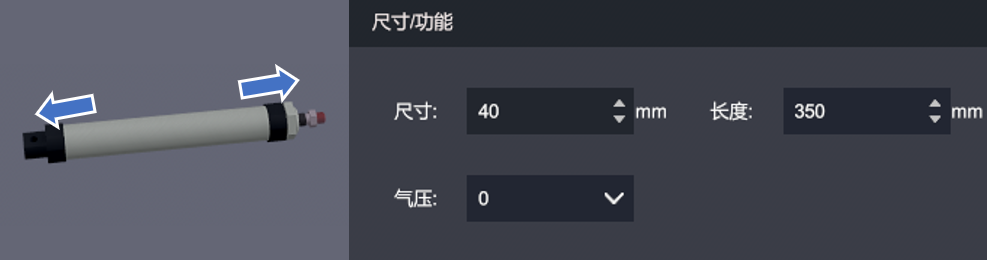
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
> 氣壓:0或1;
**控制接口:**
> * 氣動使能:DO接口,開啟后氣桿推出;
> * 負霍爾反饋:DI接口,當氣桿沒推出時,模擬控制處負霍爾反饋亮起;
> * 正霍爾反饋:DI接口,當氣桿推出時,模擬控制處正霍爾反饋亮起;
## 雙聯推杠A
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
> 氣壓:0或1;
**控制接口:**
> * 氣動使能:DO接口,開啟后氣桿推出;
> * 負霍爾反饋:DI接口,當推桿沒推出時,模擬控制處負霍爾反饋亮起;
> * 正霍爾反饋:DI接口,當推桿推出時,模擬控制處正霍爾反饋亮起;
##無桿氣桿
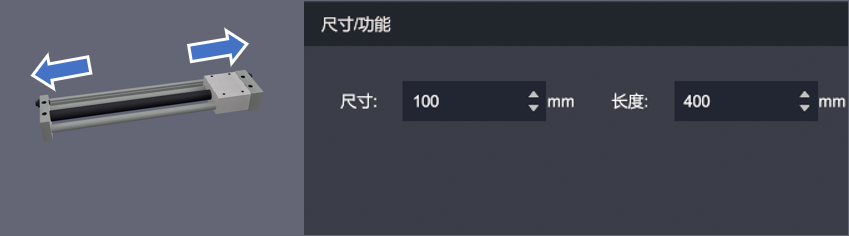
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
**控制接口:**
> * 氣動使能:DO接口,開啟后氣桿推出;
> * 負霍爾反饋:DI接口,當氣缸沒運動時,模擬控制處負霍爾反饋亮起;
> * 正霍爾反饋:DI接口,當氣缸運動時,模擬控制處正霍爾反饋亮起;
##旋轉氣缸
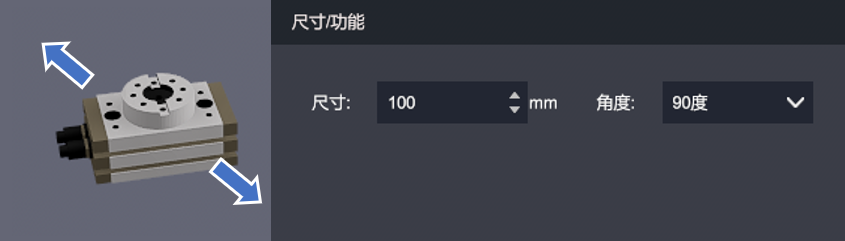
**參數尺寸:**
> 尺寸:0~9999mm;
> 角度:90°或180°
**控制接口:**
> * 氣動使能:DO接口,開啟后氣桿推出;
> * 負霍爾反饋:DI接口,當氣缸沒運動時,模擬控制處負霍爾反饋亮起;
> * 正霍爾反饋:DI接口,當氣缸運動時,模擬控制處正霍爾反饋亮起;
##氣動沖壓
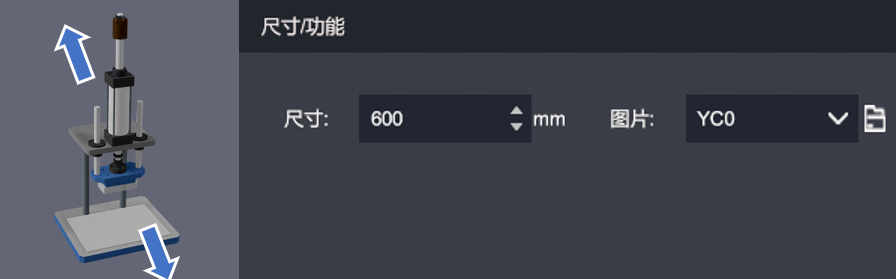
**參數尺寸:**
> 尺寸:0~9999mm;
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
**控制接口:**
> * 沖壓使能:DO接口,打開后機器運行;
> * 霍爾反饋:DI接口,機器運行后,模擬控制處霍爾反饋圖標亮起;
##激光頭
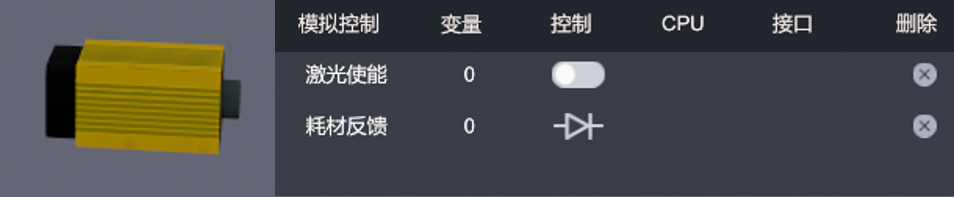
**控制接口:**
> * 激光使能:DO接口,打開后機器運行;
> * 耗材反饋:DI接口,當激光射中耗材時,模擬控制處耗材反饋圖標亮起;
##點膠頭

**控制接口:**
> * 激光使能:DO接口,打開后機器運行;
> * 耗材反饋:DI接口,當點膠頭點中耗材時,模擬控制處耗材反饋圖標亮起;
##噴涂頭

**控制接口:**
> * 噴涂使能:DO接口,打開后機器運行;
##模組畫筆
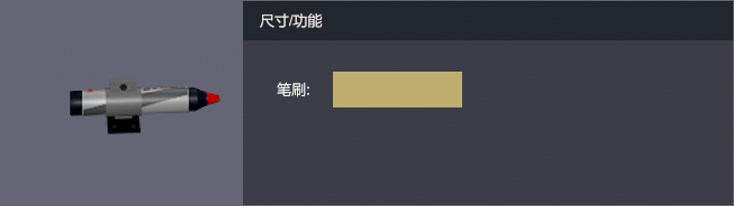
**參數尺寸:**
> 顏色:全部顏色均可使用
**控制接口:**
> * 畫筆使能:DO接口,打開后機器運行;
> * 耗材反饋:DI接口,當畫筆接觸到耗材時,模擬控制處耗材反饋圖標亮起;
##夾取氣缸
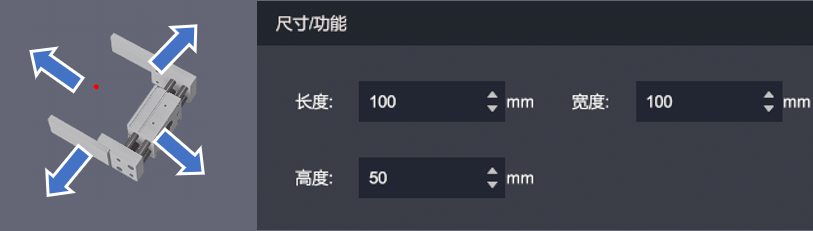
**參數尺寸:**
> * 長度:0~9999mm;
> * 寬度:0~9999mm;
> * 高度:0~9999mm;
**控制接口:**
> * 抓具使能:DO接口,開啟后抓具夾緊;
> * 耗材反饋:DI接口,當抓舉抓取到耗材時,模擬控制處耗材反饋圖標亮起;
##速度關節
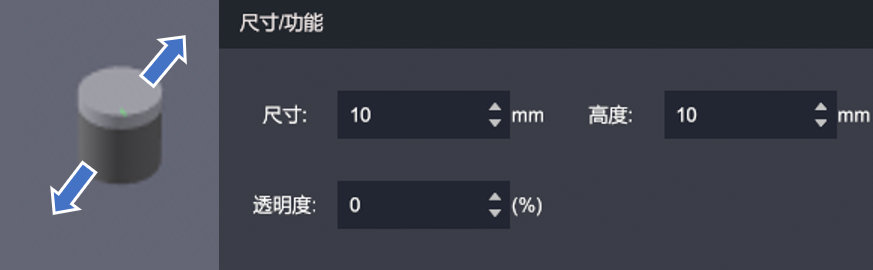
**參數尺寸:**
> 尺寸:0~9999mm;
> 高度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * 電機使能:DO接口,打開后電機開始運行;
> * 電機方向:DO接口,打開后電機反方向運行;
> * 電機轉速:F32輸出接口,控制電機轉速;
##氣動推杠A

**參數尺寸:**
> 尺寸為0~9999mm;
> 長度為0~9999mm;
> 氣壓:0或1;
**控制接口:**
> * 氣動使能:DO接口,開啟后氣缸運動;
> * 負霍爾反饋:DI接口,當氣缸沒推出時,模擬控制處負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸推出時,模擬控制處正霍爾反饋圖標亮起;
##完美旋轉氣缸
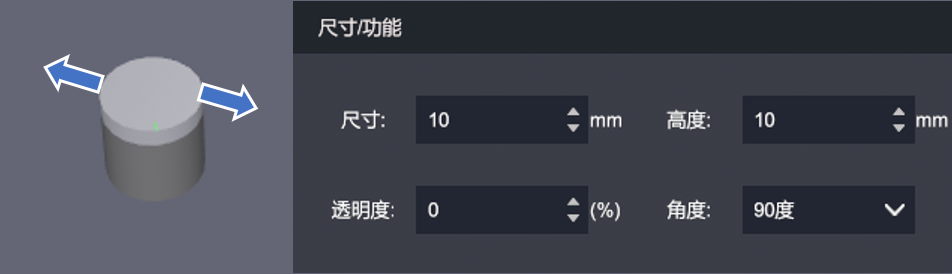
**參數尺寸:**
> 尺寸:0~9999mm;
> 高度:0~9999mm;
> 透明度:0~100%;
> 角度:90°或180°
**控制接口:**
> * 氣缸使能:DO接口,開啟后氣缸運動;
> * 負霍爾反饋:DI接口,當氣缸沒推出時,模擬控制處負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸推出時,模擬控制處正霍爾反饋圖標亮起;
##完美氣動位移
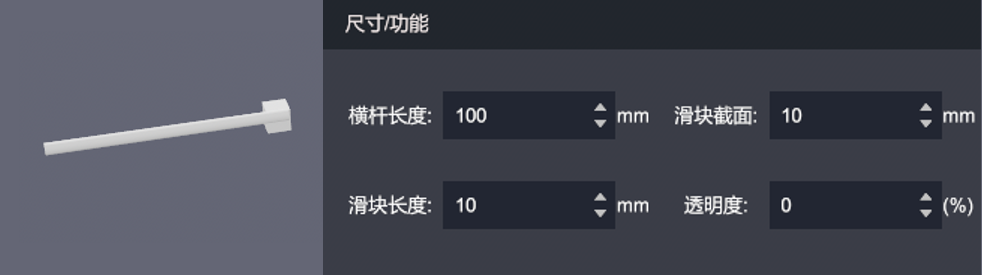
**參數尺寸:**
> 橫桿長度:0~9999mm;
> 滑塊截面:0~9999mm;
> 滑塊長度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * 氣動使能:DO接口,開啟后氣缸運動;
> * 負霍爾反饋:DI接口,當氣缸沒推出時,模擬控制處負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸推出時,模擬控制處正霍爾反饋圖標亮起;
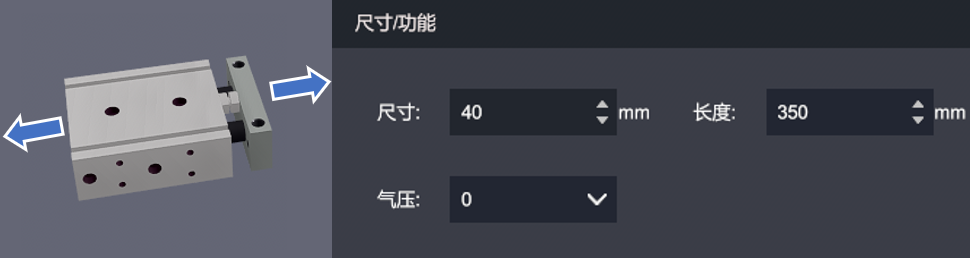
##滑臺氣缸
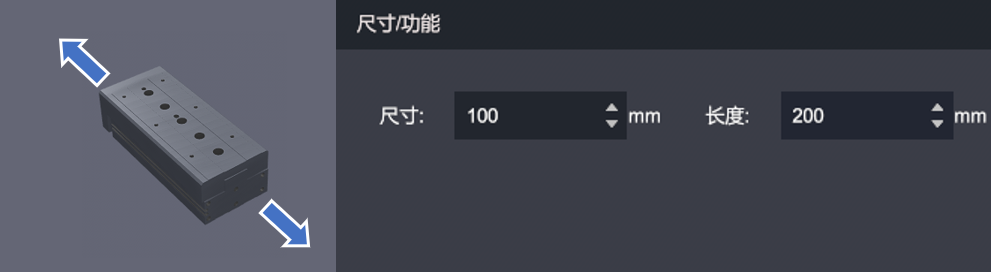
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
**控制接口:**
> * 氣缸使能:DO接口,開啟后氣缸運動;
> * 負霍爾反饋:DI接口,當氣缸沒推出時,模擬控制處負霍爾反饋圖標亮起;
> * 正霍爾反饋:DI接口,當氣缸推出時,模擬控制處正霍爾反饋圖標亮起;
##平行氣爪
**參數尺寸:**
> 尺寸:0~9999mm;
**控制接口:**
> * 夾取使能:DO接口,打開后氣爪夾取;
> * 耗材反饋:DI接口,當氣爪夾取到物料時,模擬控制處耗材反饋圖標亮起;
##三爪氣缸
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
**控制接口:**
> * 夾取使能:DO接口,打開后氣爪夾取;
> * 耗材反饋:DI接口,當氣爪夾取到物料時,模擬控制處耗材反饋圖標亮起;
##完美氣爪

**參數尺寸:**
> 長度:0~9999mm;
> 寬度:0~9999mm;
> 厚度:0~9999mm;
**控制接口:**
> * 夾取使能:DO接口,打開后氣爪夾取;
> * 耗材反饋:DI接口,當氣爪夾取到物料時,模擬控制處耗材反饋圖標亮起;
