## 差速AGV

**控制接口:**
> * 尋磁:F32輸入接口;
> * 左輪速度:F32輸出接口,控制左輪速度;
> * 右輪速度:F32輸出接口,控制右輪速度;
> * X坐標:F32輸入接口,反饋X坐標值;
> * Y坐標:F32輸入接口,反饋Y坐標值;
> * 旋轉角度:F32輸入接口,反饋旋轉角度值;
> * 前避障:DI接口,車頭觸碰物體時,反饋燈亮起;
> * 后避障:DI接口,車尾觸碰物體時,反饋燈亮起;
> * RFID:F32輸入接口;
> * 急停按鈕:DI接口,使小車急停;
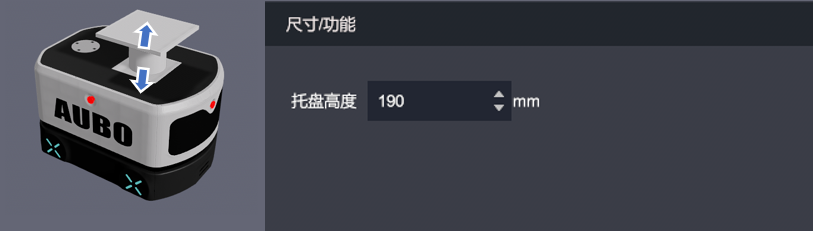
## AGV升降托盤

**模型功能:**
> 支架:工字型底座、L型底座;
> 支架長度:50~1000mm;
> 板塊大小:300*300 ~ 1000*1000mm;
**控制接口:**
> * X伺服:電機接口,控制X軸電機運動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
> * 夾具使能:DO接口,打開后夾具使能;
> * 光電反饋:Di接口,檢測到物料使,反饋圖標亮起;
## AGV背負皮帶

**模型功能:**
> 高度:50~500mm;
**控制接口:**
> * 使能:DO接口,打開后皮帶開始運轉;
> * 方向:DO接口,打開后皮帶反向運轉;
> * 速度控制:F32輸出接口,控制皮帶速度;
> * 夾具使能:DO接口,打開后夾具使能;
> * 光電反饋:DI接口,物體接觸時,反饋圖標亮起;
## 復合AGV
**模型功能:**
>托盤 高度:-10~9999mm;
**控制接口:**
> * 左輪速度:F32輸出接口,控制左輪速度;
> * 右輪速度:F32輸出接口,控制右輪速度;
> * X坐標:F32輸入接口,反饋X坐標值;
> * Y坐標:F32輸入接口,反饋Y坐標值;
> * 旋轉角度:F32輸入接口,反饋旋轉角度值;
> * 前測距:F32輸入接口,反饋車前距離數值;
> * 避障:DI接口,車觸碰物體時,反饋燈亮起;
> * RFID:F32輸入接口;
> * 急停按鈕:DI接口,使小車急停;
## 叉車AGV
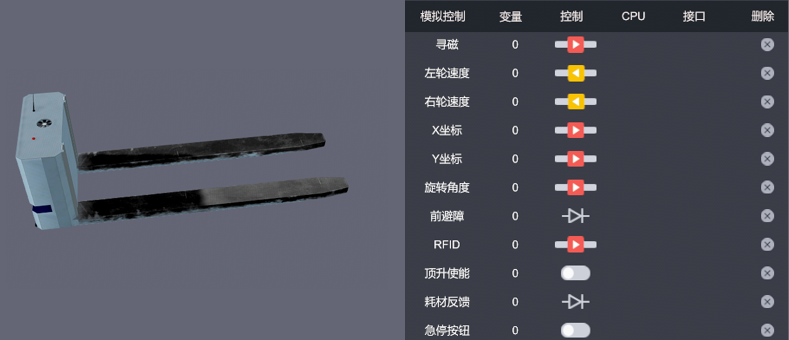
**控制接口:**
> * 尋磁:F32輸入接口;
> * 左輪速度:F32輸出接口,控制左輪速度;
> * 右輪速度:F32輸出接口,控制右輪速度;
> * X坐標:F32輸入接口,反饋X坐標值;
> * Y坐標:F32輸入接口,反饋Y坐標值;
> * 旋轉角度:F32輸入接口,反饋旋轉角度值;
> * 前避障:DI接口,車頭觸碰物體時,反饋燈亮起;
> * RFID:F32輸入接口;
> * 升頂使能:DO接口,打開后叉子升起;
> * 耗材反饋:DI接口,接觸到物體時,反饋圖標亮起;
> * 急停按鈕:DI接口,使小車急停;
## 叉車AGV
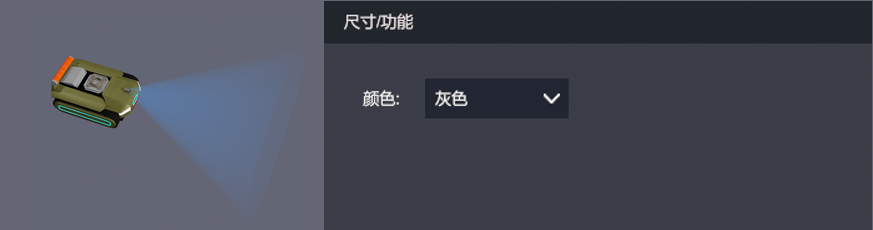
**模型功能:**
>顏色:灰色、紅色、綠色;
**控制接口:**
> * 尋磁:F32輸入接口;
> * 左輪速度:F32輸出接口,控制左輪速度;
> * 右輪速度:F32輸出接口,控制右輪速度;
> * X坐標:F32輸入接口,反饋X坐標值;
> * Y坐標:F32輸入接口,反饋Y坐標值;
> * 旋轉角度:F32輸入接口,反饋旋轉角度值;
> * 前避障:DI接口,車頭觸碰物體時,反饋燈亮起;
> * 后避障:DI接口,車尾觸碰物體時,反饋燈亮起;
> * RFID:F32輸入接口;
> * 急停按鈕:DI接口,使小車急停;
> * 血量反饋:F32輸入接口,反饋機甲血量;
## RFID
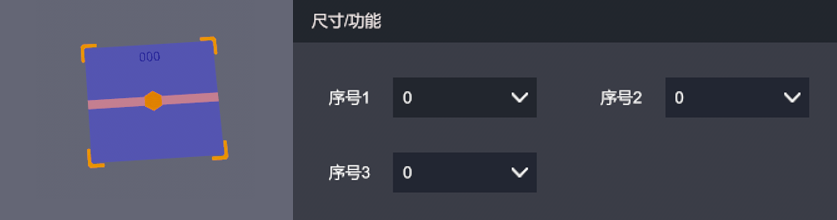
**模型功能:**
>序號1:1~9;
>序號2:1~9;
>序號3:1~9;
## 直線軌道
**模型功能:**
>長度:1~18M;
## 其他軌道
90°轉向軌道

分叉軌道

T型分叉軌道

Y型分叉軌道

