## 單軸伺服
**參數尺寸:**
> 尺寸為0~9999mm;
> 長度為0~9999mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
## 單軸伺服A
**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 伺服控制:電機接口,打開后電機啟動;
> * 伺服控制A:F32輸入接口,反饋電機角度值;
## 伺服轉盤A
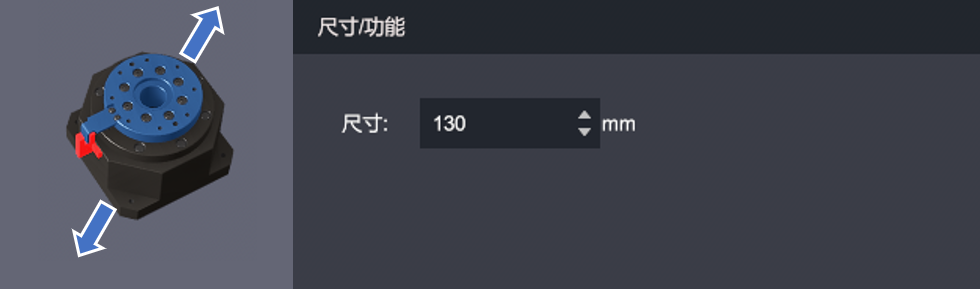
**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 伺服控制:電機接口,打開后電機啟動;
> * 伺服控制A:F32輸入接口,反饋電機角度值;
> * 光電反饋:DI接口,當轉盤在卡口位置時(及初始位置),模擬控制中的光電反饋圖標亮起;
## 交流電機
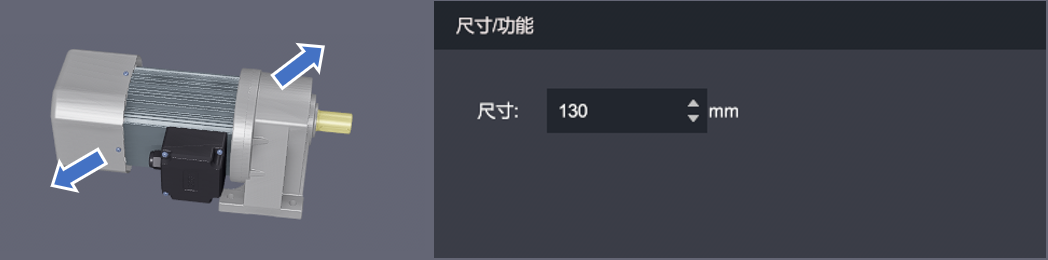
**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 電機使能:DO接口,打開后電機開始運動;
> * 電機方向:DO接口,打開后電機反方向運動;
> * 電機轉速:F32輸出接口,控制電機轉速;
## 主軸電機
**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 電機使能:DO接口,打開后電機開始運動;
> * 電機轉速:F32輸出接口,控制電機轉速;
## 數控加工中心

**參數尺寸:**
> 尺寸為0~9999mm;
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
**控制接口:**
> * 機床開門/關門:DO接口,打開后機床門開啟;
> * 機床夾具夾緊:DO接口,打開后機床內部夾具使能;
> * 機床開門反饋:DI接口,機床開門時,模擬控制處機床開門反饋圖標亮起;
> * 夾具夾緊反饋:DI接口,夾具使能時,模擬控制處夾具夾緊反饋圖標亮起;
> * 機床關門反饋:DI接口,機床關門時,模擬控制處機床關門反饋圖標亮起;
> * 使能機床加工:DO接口,開啟后,機床開始加工;
> * 急停狀態反饋:DI接口,當急停按鈕按下時,模擬控制處急停狀態反饋圖標亮起;
> * 急停使能控制:DO接口,打開后機床急停;
> * 忙閑狀態反饋:DI接口,當機床處于忙狀態時,模擬控制處忙閑狀態反饋圖標亮起;
## 數控機床
**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 機床開門/關門:DO接口,打開后機床門開啟;
> * 機床開門反饋:DI接口,機床開門時,模擬控制處機床開門反饋圖標亮起;
> * 機床夾具夾緊:DO接口,打開后機床內部夾具使能;
> * 夾具夾緊反饋:DI接口,夾具使能時,模擬控制處夾具夾緊反饋圖標亮起;
> * 使能機床加工:DO接口,開啟后,機床開始加工;
> * 急停狀態反饋:DI接口,當急停按鈕按下時,模擬控制處急停狀態反饋圖標亮起;
> * 急停使能控制:DO接口,打開后機床急停;
## 沖壓機床
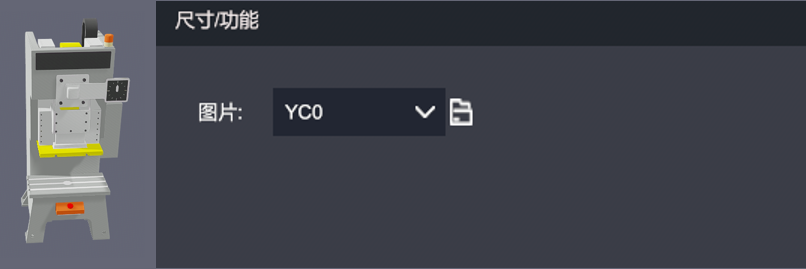
**參數尺寸:**
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
**控制接口:**
> * 耗材反饋:DI接口,當機器內有耗材時,模擬控制處耗材反饋圖標亮起;
> * 沖壓使能:DO接口,開啟后機床啟動;
## PID水罐

**參數尺寸:**
> 尺寸為0~9999mm;
**控制接口:**
> * 進水使能:DO接口,開啟后水罐進水;
> * 進水流量:F32輸出接口,控制進水流量;
> * 出水使能:DO接口,開啟后水罐出水;
> * 出水流量:F32輸出接口,控制出水流量;
> * 高報警:DI接口,當水位過高時,模擬控制處高報警圖標亮起;
> * 低報警:DI接口,當水位過低時,模擬控制處低報警圖標亮起;
> * 水位:F32輸入接口,反饋當前水位;
## 三軸點膠機
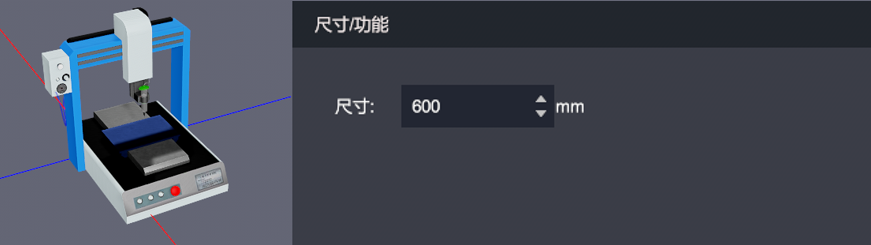
**參數尺寸:**
> 尺寸為600~9999mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * Y伺服:電機接口,打開后Y軸電機啟動;
> * Y-負限位:DI接口,當Y軸物體到達負限位時,模擬控制處Y-負限位圖標亮起;
> * Y-0限位:DI接口,當Y軸物體到達0限位時,模擬控制處Y-0限位圖標亮起;
> * Y-正限位:DI接口,當Y軸物體到達正限位時,模擬控制處Y-正限位圖標亮起;
> * Z伺服:電機接口,打開后Z軸電機啟動;
> * Z負限位:DI接口,當Z軸物體到達負限位時,模擬控制處Z-負限位圖標亮起;
> * Z-0限位:DI接口,當Z軸物體到達0限位時,模擬控制處Z-0限位圖標亮起;
> * Z-正限位:DI接口,當Z軸物體到達正限位時,模擬控制處Z-正限位圖標亮起;
> * 真空吸附:DO接口,打開后吸附空能開啟;
> * 點膠使能:DO接口,打開后點膠機出膠;
> * 碰撞反饋:DI接口,當物料耗材碰撞時,模擬控制處碰撞反饋圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
> * Y編碼:F32輸入接口,Y電機角度值反饋;
> * Z編碼:F32輸入接口,Z電機角度值反饋;
## 三坐標測量儀
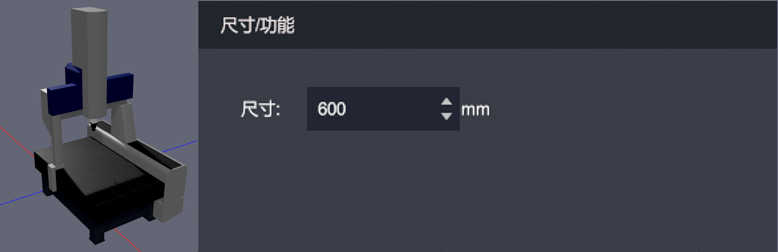
**參數尺寸:**
> 尺寸為700~9999mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * Y伺服:電機接口,打開后Y軸電機啟動;
> * Y-負限位:DI接口,當Y軸物體到達負限位時,模擬控制處Y-負限位圖標亮起;
> * Y-0限位:DI接口,當Y軸物體到達0限位時,模擬控制處Y-0限位圖標亮起;
> * Y-正限位:DI接口,當Y軸物體到達正限位時,模擬控制處Y-正限位圖標亮起;
> * Z伺服:電機接口,打開后Z軸電機啟動;
> * Z負限位:DI接口,當Z軸物體到達負限位時,模擬控制處Z-負限位圖標亮起;
> * Z-0限位:DI接口,當Z軸物體到達0限位時,模擬控制處Z-0限位圖標亮起;
> * Z-正限位:DI接口,當Z軸物體到達正限位時,模擬控制處Z-正限位圖標亮起;
> * 碰撞反饋:DI接口,當物料耗材碰撞時,模擬控制處碰撞反饋圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
> * Y編碼:F32輸入接口,Y電機角度值反饋;
> * Z編碼:F32輸入接口,Z電機角度值反饋;
## 激光雕刻機
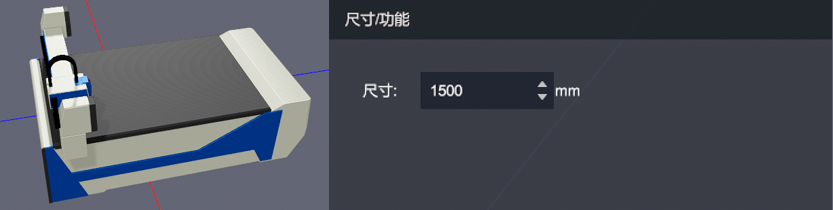
**參數尺寸:**
> 尺寸為1500~9999mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * Y伺服:電機接口,打開后Y軸電機啟動;
> * Y-負限位:DI接口,當Y軸物體到達負限位時,模擬控制處Y-負限位圖標亮起;
> * Y-0限位:DI接口,當Y軸物體到達0限位時,模擬控制處Y-0限位圖標亮起;
> * Y-正限位:DI接口,當Y軸物體到達正限位時,模擬控制處Y-正限位圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
> * Y編碼:F32輸入接口,Y電機角度值反饋;
> * 激光使能:DO接口,開啟后激光啟動;
> * 耗材反饋:DI接口,當耗材與激光雕刻機平面接觸時,模擬控制處的耗材反饋圖標亮起;
## 立庫
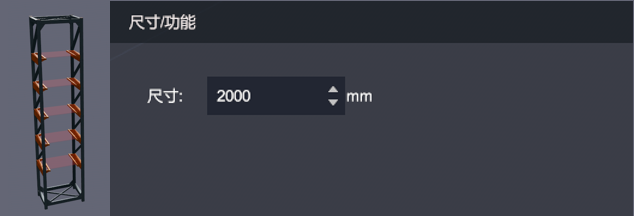
**參數尺寸:**
> 尺寸為固定數值2000mm;
## 倉儲堆垛機
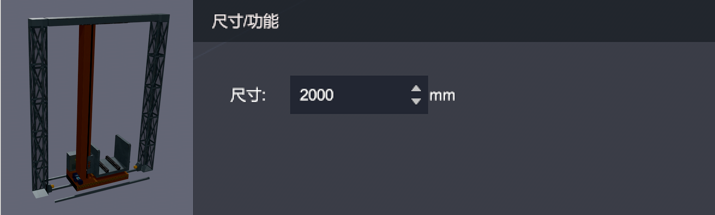
**參數尺寸:**
> 尺寸為2000~8000mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * Y伺服:電機接口,打開后Y軸電機啟動;
> * Y-負限位:DI接口,當Y軸物體到達負限位時,模擬控制處Y-負限位圖標亮起;
> * Y-0限位:DI接口,當Y軸物體到達0限位時,模擬控制處Y-0限位圖標亮起;
> * Y-正限位:DI接口,當Y軸物體到達正限位時,模擬控制處Y-正限位圖標亮起;
> * X編碼:F32輸入接口,X電機角度值反饋;
> * Y編碼:F32輸入接口,Y電機角度值反饋;
> * 伸縮叉方向:DO接口,打開后伸縮與當前方向反向運行;
> * 伸縮叉使能:DO接口,打開后伸縮叉開始運動;
## 行車起重機
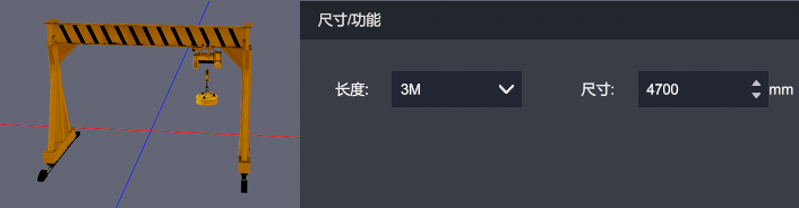
**參數尺寸:**
> 長度為3~15M,尺寸為4700mm~9999mm
**控制接口:**
> * X速度控制:F32輸出接口,控制X軸方向起重機速度;
> * X方向:DO接口,打開后X方向起重機反向運行;
> * X使能:DO接口,打開后X方向起重機開始運動;
> * X編碼:F32輸入接口,反饋X反向角度值;
> * X-0限位:DI接口,當X方向的起重機到達0限位時,模擬控制出的X-0限位圖標亮起;
> * X-正限位:DI接口,當X方向的起重機到達正限位時,模擬控制出的X-正限位圖標亮起;
> * Y速度控制:F32輸出接口,控制Y軸方向起重機速度;
> * Y方向:DO接口,打開后Y方向起重機反向運行;
> * Y使能:DO接口,打開后Y方向起重機開始運動;
> * Y編碼:F32輸入接口,反饋Y反向角度值;
> * Y-0限位:DI接口,當Y方向的起重機到達0限位時,模擬控制出的Y-0限位圖標亮起;
> * Y-正限位:DI接口,當Y方向的起重機到達正限位時,模擬控制出的Y-正限位圖標亮起;
> * Z速度控制:F32輸出接口,控制Z軸方向起重機速度;
> * Z方向:DO接口,打開后Z方向起重機反向運行;
> * Z使能:DO接口,打開后Z方向起重機開始運動;
> * Z編碼:F32輸入接口,反饋Z反向角度值;
> * Z-0限位:DI接口,當Z方向的起重機到達0限位時,模擬控制出的Z-0限位圖標亮起;
> * Z-正限位:DI接口,當Z方向的起重機到達正限位時,模擬控制出的Z-正限位圖標亮起;
> * 電磁使能:DO接口,打開后電磁吸附開始運作;
> * 抓具檢測:DI接口,當檢測到有抓具時,模擬控制處的抓舉檢測圖標亮起;
> * 機械報警:DI接口,檢測到機械碰撞時,模擬控制處的機械報警圖標亮起;
> * 重力反饋:F32輸入接口,反饋重力值;
## 支架托盤

**參數尺寸:**
> 長度為200~500mm
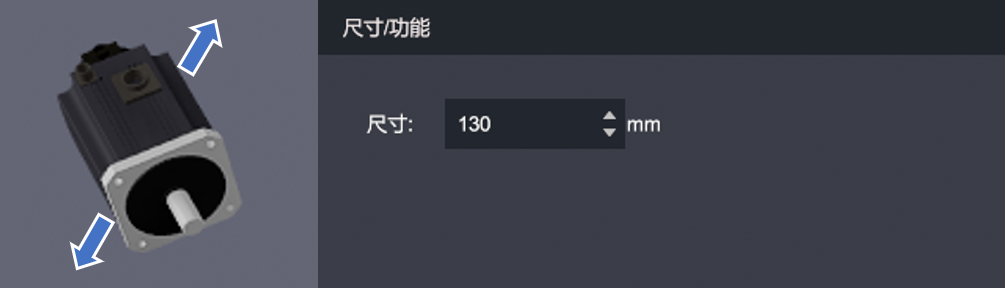
## 伺服關節
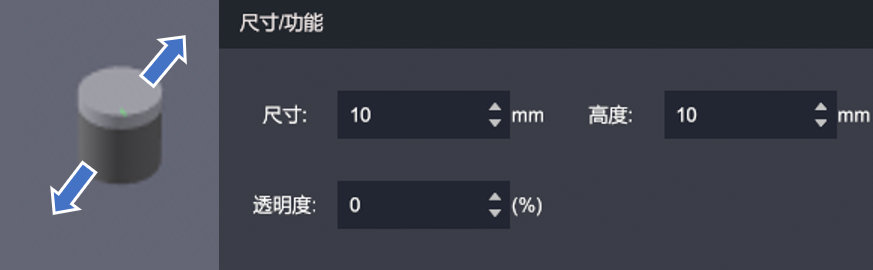
**參數尺寸:**
> 尺寸:0~9999mm;
> 高度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * 伺服控制:電機接口,打開后電機啟動;
> * 伺服控制反饋:F32輸入接口,反饋電機角度值;
## 完美伺服位移
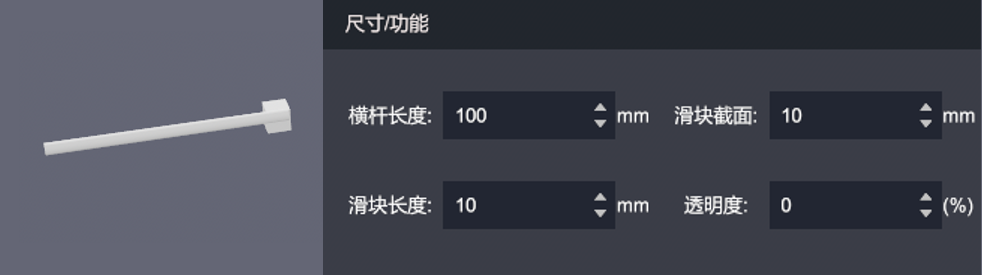
**參數尺寸:**
> 橫桿長度:0~9999mm;
> 滑塊截面:0~9999mm;
> 滑塊長度:0~9999mm;
> 透明度:0~100%;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * X編碼:F32輸入接口,反饋X反向角度值;
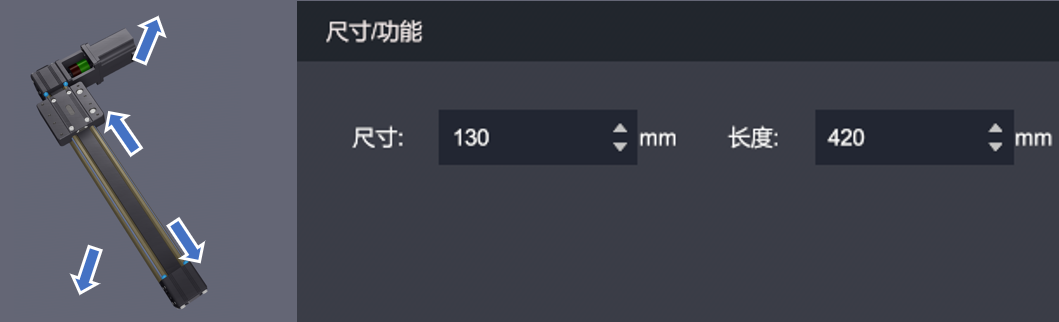
## 電動缸A
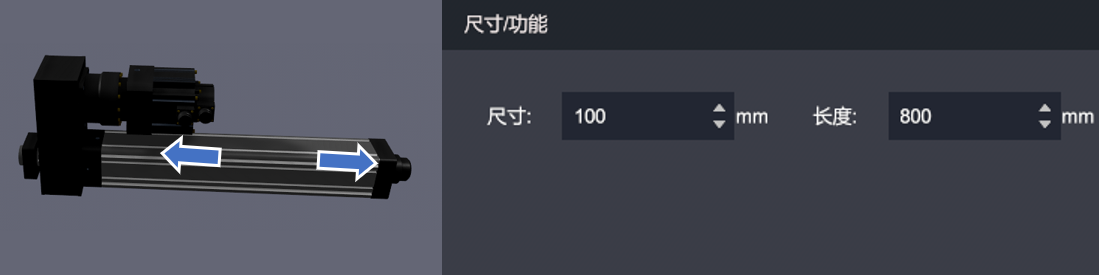
**參數尺寸:**
> 尺寸:0~9999mm;
> 長度:0~9999mm;
**控制接口:**
> * X伺服:電機接口,打開后X軸電機啟動;
> * X-負限位:DI接口,當X軸物體到達負限位時,模擬控制處X-負限位圖標亮起;
> * X-0限位:DI接口,當X軸物體到達0限位時,模擬控制處X-0限位圖標亮起;
> * X-正限位:DI接口,當X軸物體到達正限位時,模擬控制處X-正限位圖標亮起;
> * X編碼:F32輸入接口,反饋X反向角度值;
## 激光打標機
**參數尺寸:**
> 尺寸:0~9999mm;
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
**控制接口:**
> * 打標使能:DO接口,開啟后打標機啟動;
> * 霍爾反饋:DI接口,當激光接觸物料耗材時,模擬控制處霍爾反饋圖標亮起;
## 數字噴碼機

**參數尺寸:**
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
> 噴碼大小:50*50~300*300mm;
**控制接口:**
> * 光電檢測:DI接口,當紅外線檢測到耗材時,模擬控制處光電檢測圖標亮起;
> * 噴碼使能:DO接口,打開后噴碼機開始噴涂;
## 貼標機
**參數尺寸:**
> 圖片:圖片為加工出的圖片,軟件自帶10種不同圖片,用戶也可以自行進行根目錄文件夾進行添加替換;
> 尺寸:0~9999mm;
**控制接口:**
> * 貼標使能:DO接口,打開后貼標機開始貼標;
> * 光電檢測:DI接口,當紅外線檢測到耗材時,模擬控制處光電檢測圖標亮起;
