
**功能描述**:結合外標定文件,對原始LiDAR文件進行解析生成地理參考點云數據。
**步驟**:
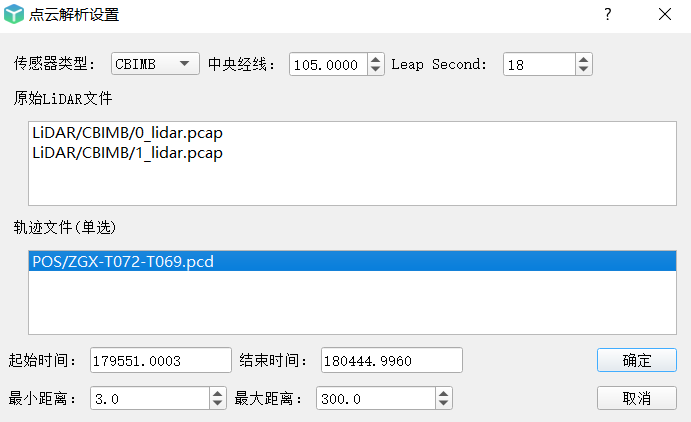
1. 點擊按鈕,彈出點云解析界面。
1. 設置點云解析參數,點擊“確定”。
參數設置
傳感器類型:與原始LiDAR數據獲取對應的激光雷達系統類型。
中央經線:高斯投影中央經線。
Leap Second:GPS時間相對UTC時間的秒跳。
起始時間:軌跡文件的起始時間,選擇軌跡后自動讀取,也可以選取軌跡上一段特定的時間,手動設置。
結束時間:軌跡文件的結束時間,選擇軌跡后自動讀取,也可以選取軌跡上一段特定的時間,手動設置。
最小距離:目標點距離載體的最小距離
最大距離:目標點距離載體的最大距離
注意:軟件所有時間默認為**周秒**
