#### 關鍵點生成
功能描述:生成用于精細化巡檢的特定航跡點
步驟
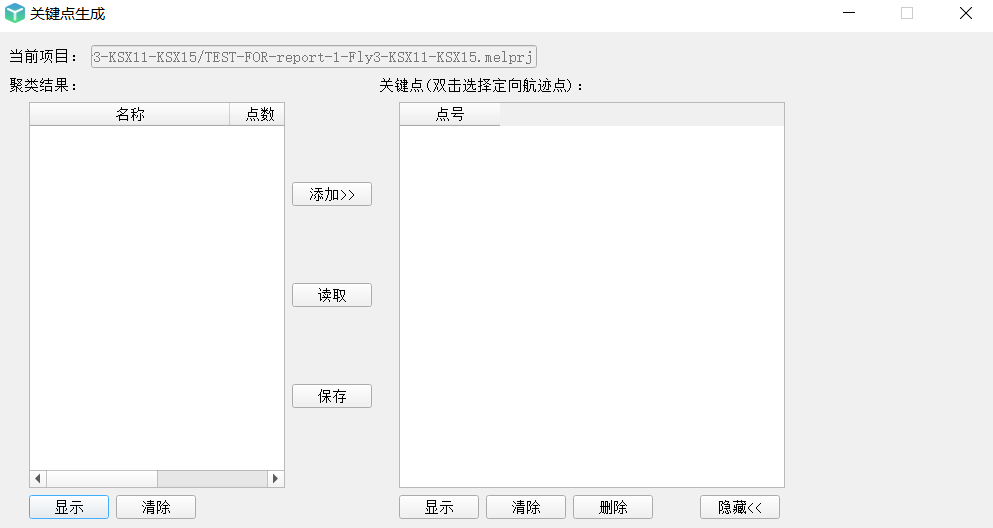
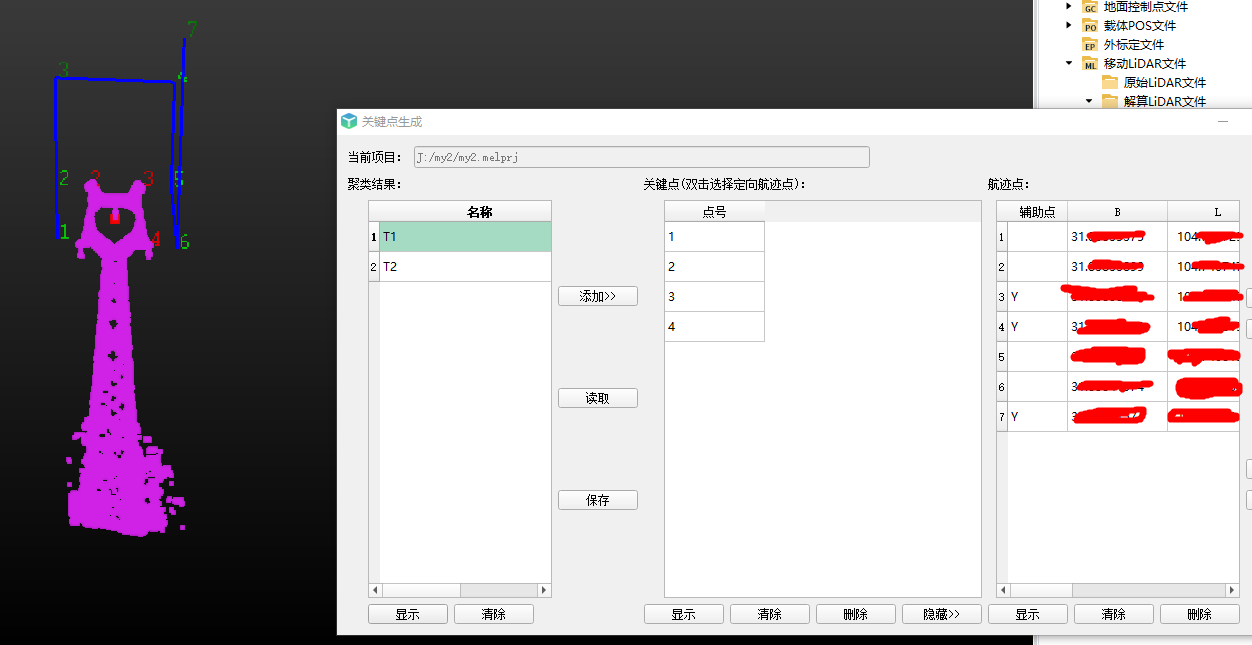
1. 點擊按鈕,彈出關鍵點生成界面。
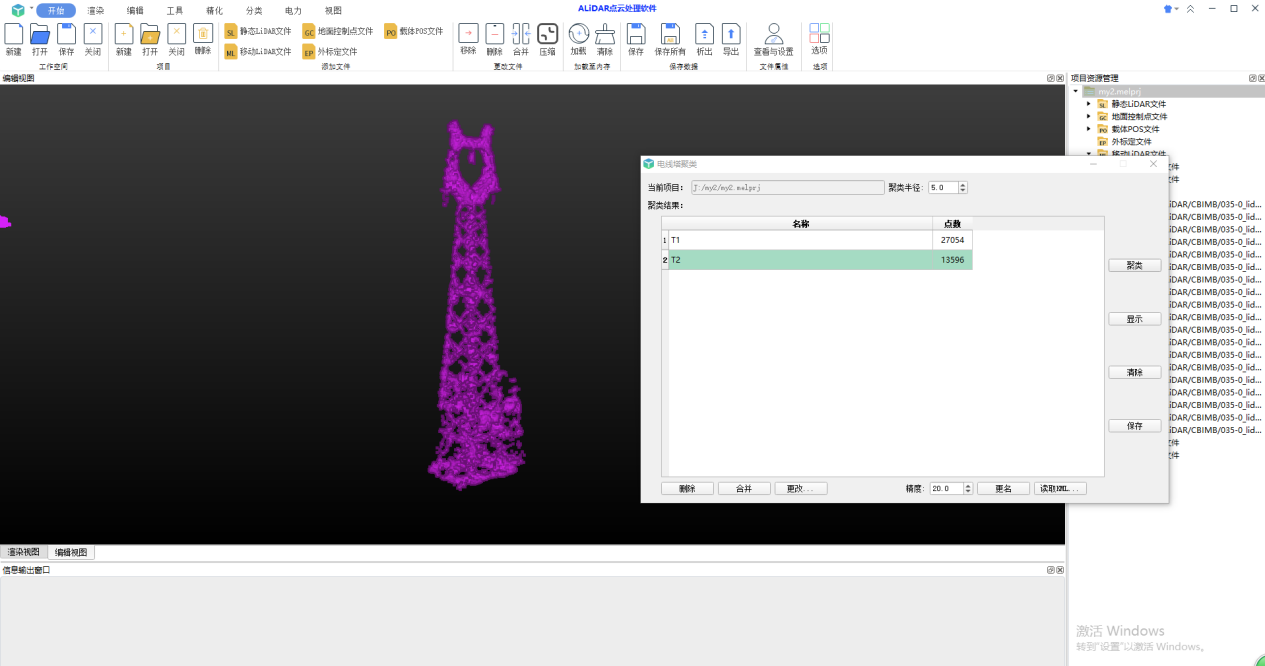
1. 點擊“讀取”,加載電線塔聚類結果。
1. 點擊“顯示”,將選擇的電線塔顯示在主視圖中。
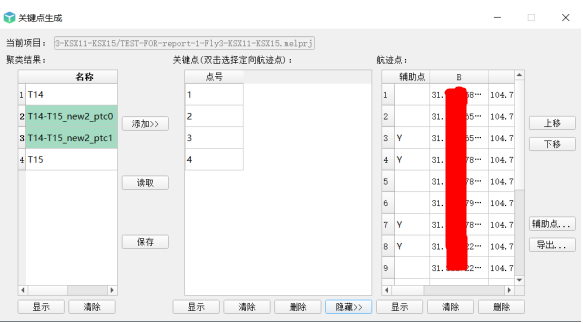
1. 在編輯模塊中,使用點選擇工具選擇關鍵點,點擊“添加”將關鍵點加載到關鍵點窗口中。
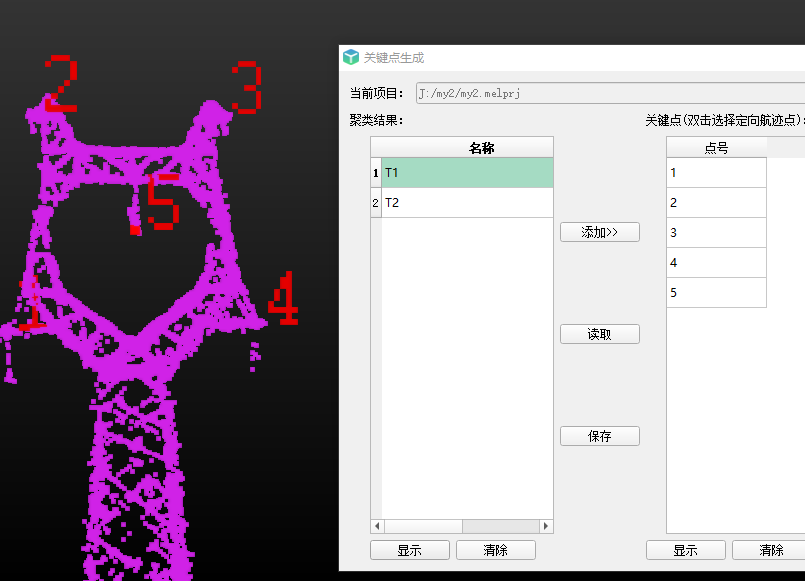
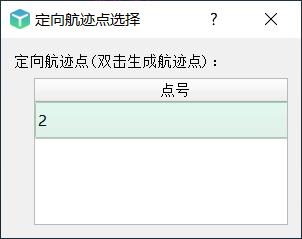
1. 在關鍵點窗口中,雙擊選擇定向航跡點,彈出定向航跡點選擇窗口。
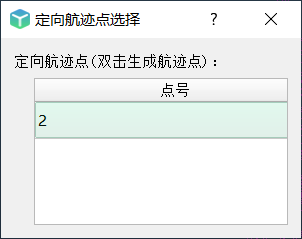
1. 在定向航跡點選擇窗口中,雙擊生成航跡點,彈出航跡點生成窗口。
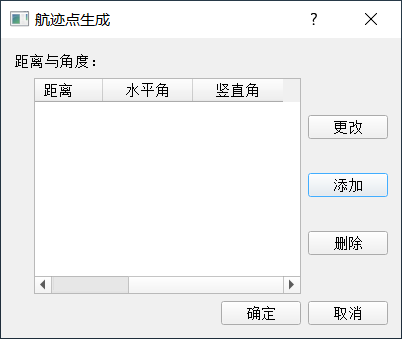
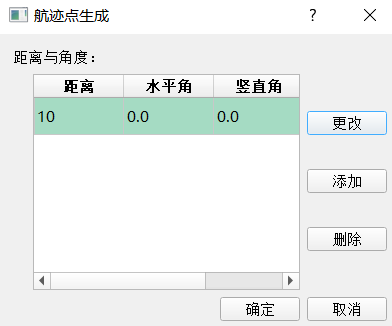
1. 點擊“添加”,彈出航跡點距離與角度設置窗口,設置距離與角度參數,點擊“確定”。(可添加多個航跡點)
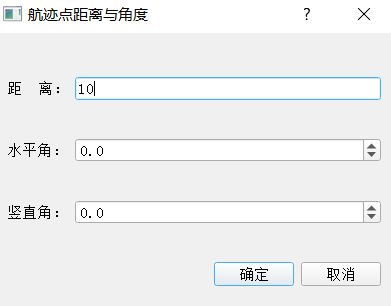
1. 特定的航跡點參數信息加載到航跡點生成窗口中,點擊“確定”。
1. 關閉定向航跡點選擇窗口。
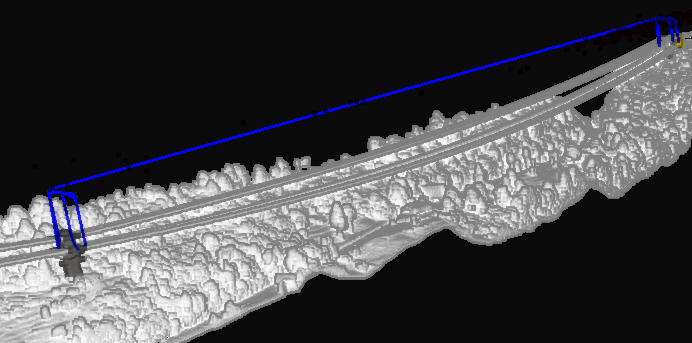
1. 在右側關鍵點窗口點擊“顯示”,將生成的特定航跡點(黃色)顯示在主視圖中。

參數設置
關鍵點生成窗口
讀取:讀取已有的電塔聚類結果
顯示(左側):將聚類的電塔顯示在主視圖中
清除(左側):將顯示在主視圖中的聚類電塔結果清除
添加:將編輯模塊中選擇的點加載到右側關鍵點分窗口中
保存:保存選擇的關鍵點
顯示(中間):將生成的特定航跡點顯示在主視圖中
清除(中間):將顯示在主視圖中的特定航跡點清除
刪除:刪除生成的特定航跡點
隱藏:顯示與隱藏航跡點相關表格與按鈕。
航跡點生成窗口:
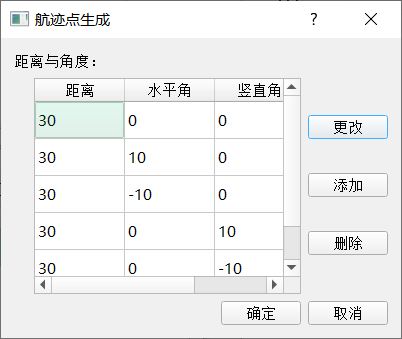
更改:更改要生成航跡點的距離與角度參數。
添加:添加新的航跡點,并設置相應的距離與角度。
刪除:刪除已設置的航跡點。
航跡點相關表格與按鈕:
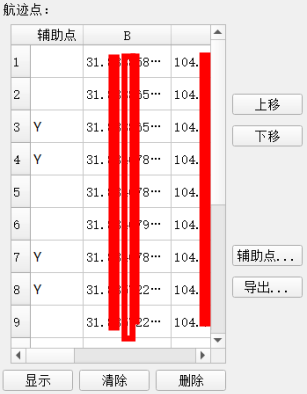
上移:將選中的航跡點順序上移。
下移:將選中的航跡點順序下移。
輔助點:增加輔助點(不拍攝影像的航跡點)。
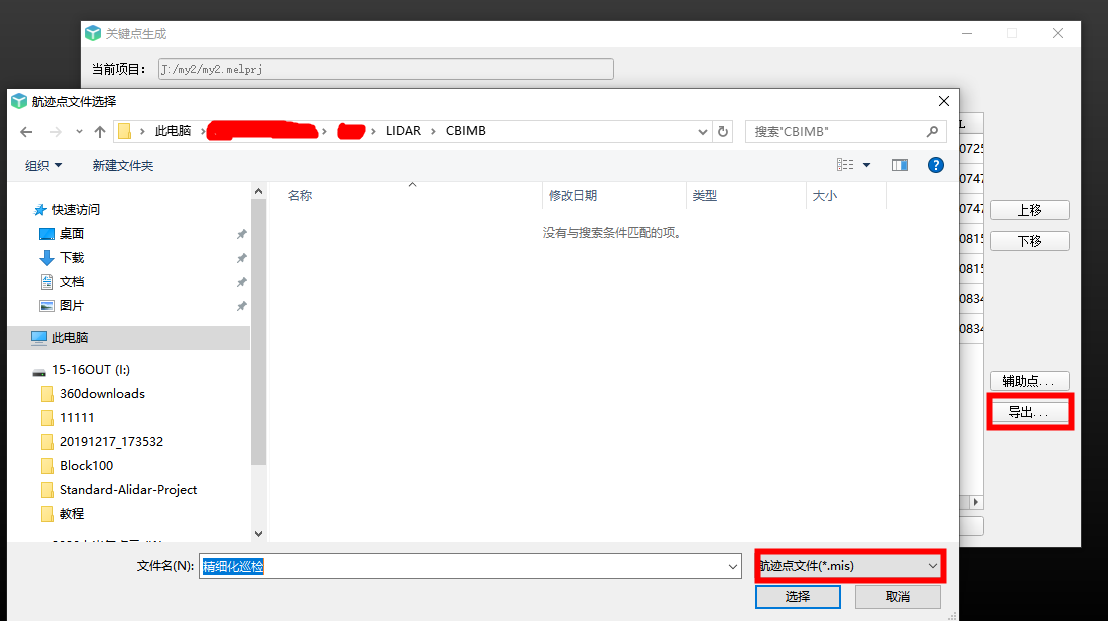
導出:將生成的特定航跡點導出成MIS文件
顯示:將生成的航跡點顯示在主視圖中
清除:將顯示在主視圖中的航跡點清除
刪除:刪除選中的航跡點
軟件制作的精細巡檢航跡圖:
11、導出
航跡點編輯完成后,點擊導出,將文件存儲于項目文件夾中。文件為\*.msi格式,該格式可以配合公司提供的LiDAR助手,直接上傳至大疆精靈、M200、M600等飛行平臺。