
## 2.4 epoll API
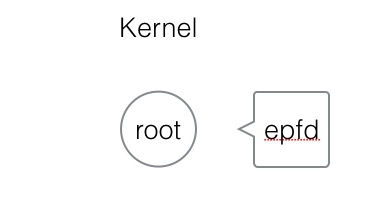
2.4.1 創建EPOLL
```cpp
/**
* @param size 告訴內核監聽的數目
*
* @returns 返回一個epoll句柄(即一個文件描述符)
*/
int epoll_create(int size);
```
```cpp
int epfd = epoll_create(1000);
```
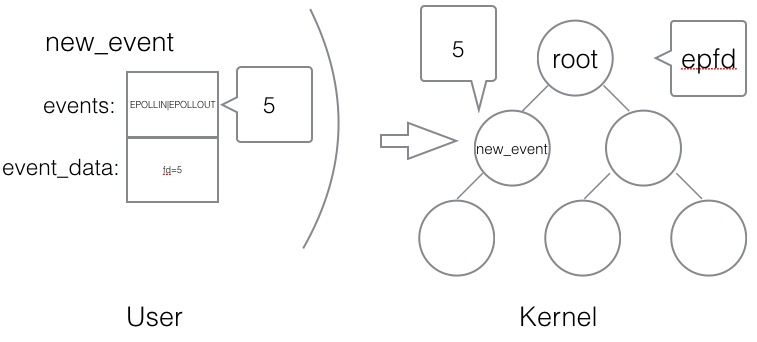
2.4.2 控制EPOLL
```cpp
/**
* @param epfd 用epoll_create所創建的epoll句柄
* @param op 表示對epoll監控描述符控制的動作
*
* EPOLL_CTL_ADD(注冊新的fd到epfd)
* EPOLL_CTL_MOD(修改已經注冊的fd的監聽事件)
* EPOLL_CTL_DEL(epfd刪除一個fd)
*
* @param fd 需要監聽的文件描述符
* @param event 告訴內核需要監聽的事件
*
* @returns 成功返回0,失敗返回-1, errno查看錯誤信息
*/
int epoll_ctl(int epfd, int op, int fd,
struct epoll_event *event);
struct epoll_event {
__uint32_t events; /* epoll 事件 */
epoll_data_t data; /* 用戶傳遞的數據 */
}
/*
* events : {EPOLLIN, EPOLLOUT, EPOLLPRI,
EPOLLHUP, EPOLLET, EPOLLONESHOT}
*/
typedef union epoll_data {
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;
```
```cpp
struct epoll_event new_event;
new_event.events = EPOLLIN | EPOLLOUT;
new_event.data.fd = 5;
epoll_ctl(epfd, EPOLL_CTL_ADD, 5, &new_event);
```
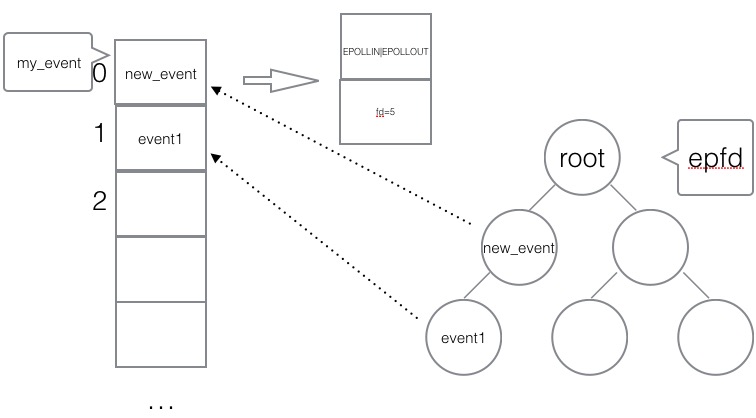
2.4.3 等待EPOLL
```cpp
/**
*
* @param epfd 用epoll_create所創建的epoll句柄
* @param event 從內核得到的事件集合
* @param maxevents 告知內核這個events有多大,
* 注意: 值 不能大于創建epoll_create()時的size.
* @param timeout 超時時間
* -1: 永久阻塞
* 0: 立即返回,非阻塞
* >0: 指定微秒
*
* @returns 成功: 有多少文件描述符就緒,時間到時返回0
* 失敗: -1, errno 查看錯誤
*/
int epoll_wait(int epfd, struct epoll_event *event,
int maxevents, int timeout);
```
```cpp
struct epoll_event my_event[1000];
int event_cnt = epoll_wait(epfd, my_event, 1000, -1);
```
2.4.4 epoll編程框架
```cpp
//創建 epoll
int epfd = epoll_crete(1000);
//將 listen_fd 添加進 epoll 中
epoll_ctl(epfd, EPOLL_CTL_ADD, listen_fd,&listen_event);
while (1) {
//阻塞等待 epoll 中 的fd 觸發
int active_cnt = epoll_wait(epfd, events, 1000, -1);
for (i = 0 ; i < active_cnt; i++) {
if (evnets[i].data.fd == listen_fd) {
//accept. 并且將新accept 的fd 加進epoll中.
}
else if (events[i].events & EPOLLIN) {
//對此fd 進行讀操作
}
else if (events[i].events & EPOLLOUT) {
//對此fd 進行寫操作
}
}
}
```
- 封面
- 1 Libevent官方
- 2 epoll
- 2.1 流-IO操作-阻塞
- 2.2 解決阻塞死等待的辦法
- 2.3 什么是epoll
- 2.4 epollAPI
- 2.5 觸發模式
- 2.6 簡單的epoll服務器
- 3 epoll和reactor
- 3.1 reactor反應堆模式
- 3.2 epoll的反應堆模式實現
- 4 event_base
- 4.1 創建event_base
- 4.2 檢查event_base后端
- 4.3 釋放event_base
- 4.4 event_base優先級
- 4.5 event_base和fork
- 5 事件循環event_loop
- 5.1 運行循環
- 5.2 停止循環
- 5.3 轉儲event_base的狀態
- 6 事件event
- 6.1 創建事件
- 6.2 事件的未決和非未決
- 6.3 事件的優先級
- 6.4 檢查事件狀態
- 6.5 一次觸發事件
- 6.6 手動激活事件
- 6.7 事件狀態之間的轉換
- 7 數據緩沖Bufferevent
- 7.1 回調和水位
- 7.2 延遲回調
- 7.3 bufferevent 選項標志
- 7.4 使用bufferevent
- 7.5 通用bufferevent操作
- 7.5.1 釋放bufferevent操作
- 7.5.2 操作回調、水位和啟用/禁用
- 7.5.3 操作bufferevent中的數據
- 7.5.4 bufferevent的清空操作
- 8 數據封裝evBuffer
- 8.1 創建和釋放evbuffer
- 8.2 evbuffer與線程安全
- 8.3 檢查evbuffer
- 8.4 向evbuffer添加數據
- 8.5 evbuffer數據移動
- 8.6 添加數據到evbuffer前
- 8 鏈接監聽器evconnlistener
- 8.1 創建和釋放 evconnlistener
- 8.2 啟用和禁用 evconnlistener
- 8.3 調整 evconnlistener 的回調函數
- 8.4 檢測 evconnlistener
- 8.5 偵測錯誤
- 9 libevent常用設置
- 9.1 日志消息回調設置
- 9.2 致命錯誤回調設置
- 9.3 內存管理回調設置
- 9.4 鎖和線程的設置
- 9.5 調試事件的使用
- 10 基于libevent服務器
- 10.1 Hello_World服務器(基于信號)
- 10.2 基于事件服務器
- 10.3 回顯服務器
- 10.3 libevent實現http服務器