

點云解析是指對奧倫達CBI系列硬件系統外業采集的原始數據進行處理,獲得帶有地理參考(絕對坐標系統)的點坐標(點云數據)。該功能主要是購買了奧倫達CBI系列硬件系統的用戶使用。
#### 點云解析
**功能:**結合外標定文件,對原始LiDAR文件進行解析生成地理參考點云數據。
**步驟**:
1. 點擊按鈕,彈出點云解析界面。
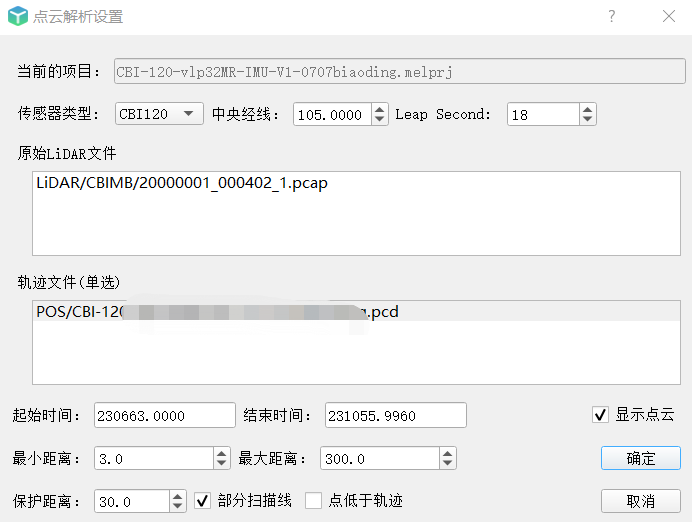
1. 設置點云解析參數,點擊“確定”。
參數設置:
傳感器類型:與原始LiDAR數據獲取對應的激光雷達系統類型。
中央經線:高斯投影中央經線。
Leap Second:GPS時間相對UTC時間的秒跳。
起始時間:軌跡文件的起始時間,選擇軌跡后自動讀取,也可以選取軌跡上一段特定的時間,手動設置。
結束時間:軌跡文件的結束時間,選擇軌跡后自動讀取,也可以選取軌跡上一段特定的時間,手動設置。
最小距離:目標點距離載體的最小距離
最大距離:目標點距離載體的最大距離
部分掃描線:為減小數據量,不需要所有掃描數據,則勾選
保護距離:在僅解析部分掃描線情況下,在保護距離范圍內的點被全部解析。
點低于軌跡:高于軌跡的點不被解析。
顯示點云:在解析過程中,是否顯示解析的點云。
注意:軟件所有時間默認為**周秒**
#### 批量解析
**功能:**批量解析多個項目的原始LiDAR文件生成地理參考點云數據。
**步驟**:
1. 點擊按鈕,彈出批量點云解析界面。
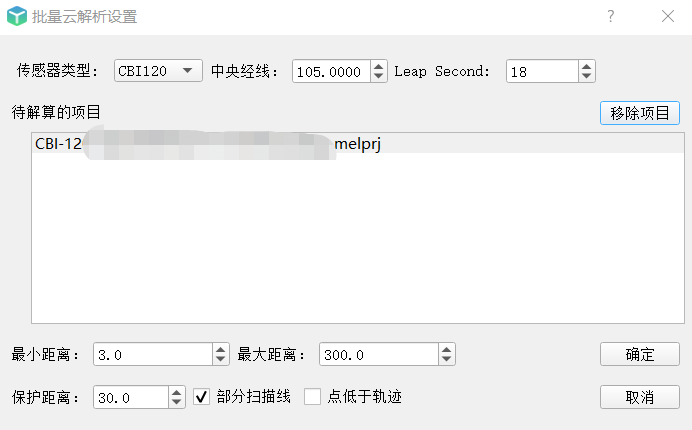
1. 設置點云解析參數,點擊“確定”。
參數設置:
傳感器類型:與原始LiDAR數據獲取對應的激光雷達系統類型。
中央經線:高斯投影中央經線。
Leap Second:GPS時間相對UTC時間的秒跳。
待解算的項目:可移除不需要解算的項目。
最小距離:目標點距離載體的最小距離
最大距離:目標點距離載體的最大距離
部分掃描線:為減小數據量,不需要所有掃描數據,則勾選
保護距離:在僅解析部分掃描線情況下,在保護距離范圍內的點被全部解析。
點低于軌跡:高于軌跡的點不被解析。
顯示點云:在解析過程中,是否顯示解析的點云。
注意:軟件所有時間默認為**周秒**
- 概況
- 安裝與激活
- 軟件安裝
- 軟件激活方法
- 激活碼申請
- 在線激活
- 離線激活
- 用戶登錄
- 模塊介紹
- 項目管理模塊
- 工作空間
- 項目
- 添加文件
- 更改文件
- 加載點云
- 停止任務
- 析出數據
- 文件屬性查看
- 選項
- 快捷操作
- 渲染模塊
- 渲染模式
- 點云顯示類型
- 軌跡顯示類型
- 顯示與定位
- 渲染設置
- 渲染視圖
- 編輯模塊
- 編輯模式
- 局部視圖
- 擴展選擇
- 選點類型
- 點操作
- 量測
- 保存編輯
- 控制點編輯
- 工具模塊
- 重采樣類型
- 按時間截取
- 數據分段
- 點云配準
- RGB更改
- 點云解析
- 精化模塊
- 精化方法
- 結果查看
- 分類模塊
- 分類方法
- 地物提取
- 電力模塊
- 添加文件
- 桿塔標記
- 電力切檔
- 電線補點
- 精細分類
- 矢量化
- 樹障分析
- 精細巡檢
- 視圖模塊
- 窗口視圖
- 軌跡管理器
- 主題
- 附錄