# 安裝結果測試
## 針對ROS 1.0的安裝結果測試
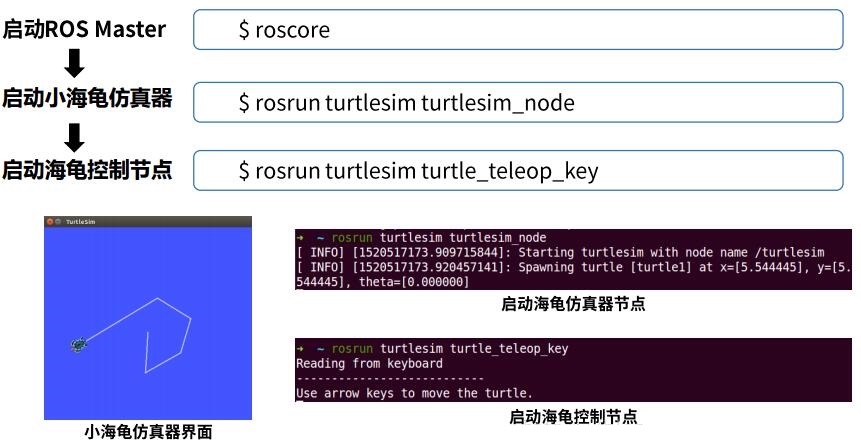
1. 新建一個終端,啟動ROS的Master節點:
```
roscore
```
2. 新建一個終端,啟動turtlesim的Node節點(節點啟動成功后,你將在屏幕上看到一只小海龜):
```
rosrun turtlesim turtlesim_node
```
3. 新建一個終端,啟動turtlesim的鍵盤控制節點(節點啟動成功后,你將可以通過鍵盤的方向鍵控制小海龜移動):
```
rosrun turtlesim turtle_teleop_key
```
> 注:如果在執行的時候提示錯誤,有可能是因為turtlesim的仿真包沒有安裝,可以通過執行
> sudo apt-get install ros-[發行版本]-turtlesim
> 安裝成功后再繼續測試。可將**[發行版本]**替換為: kinetic melodic moetic。
<br>
Enjoy it.
[機器人實驗室 https://roboticslab.cn](https://roboticslab.cn)
