可以用于ROS開發的IDE很多,ROS的調試依賴環境變量,與外部程序有通訊,因此要求啟動IDE的時候加載ROS環境參數,其他方面并無太多限制。
今天我們講講Qt Creator的安裝與配置。Qt Creator是一個輕量級、配置起來也更方便簡潔的ROS開發工具。
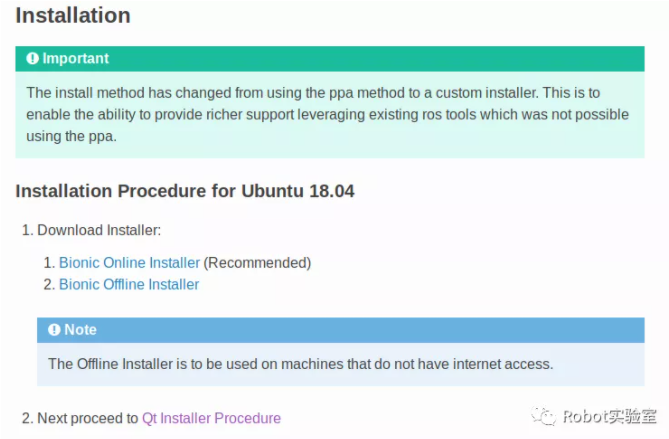
QtCreator的ROS插件雖然是一款插件,但是在其官網已經打包了一個QtCreator,也就是說插件和安裝包是做在一起的,當你通過這個安裝包安裝成功后,QtCreator和ROS的插件將都安裝成功。下載地址是(在**Robot實驗室**公眾號回復:qtros即可獲得多個版本的百度網盤下載鏈接):
https://ros-qtc-plugin.readthedocs.io/en/latest/\_source/How-to-Install-Users.html#qt-installer-procedure
目前支持 14.04、16.04和18.04,目前不支持Ubuntu 20.04。這里我們下載Ubuntu 18.04的離線軟件包:
:-: 
現在我們安裝這個軟件包:
1. 打開一個終端,可以使用Alt+Ctrl+T,使用cd命令路徑到存放軟件的地方;
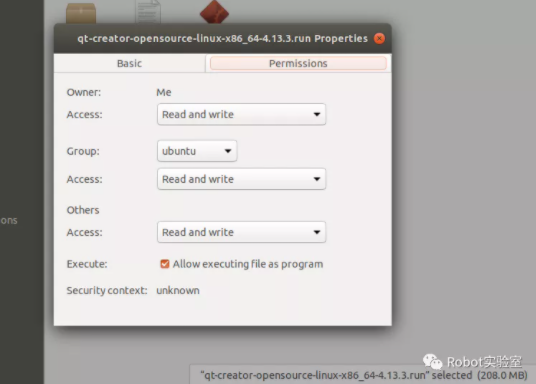
2. 執行chmod +x ?qtcreator-ros-bionic-latest-offline-installer.run 修改權限。也可以用鼠標右擊此文件,選擇Properties,將‘權限’中的‘執行’打勾;
:-: 
3. 執行 ./qtcreator-ros-bionic-latest-offline-installer.run開始安裝(或者雙擊運行);
:-: 
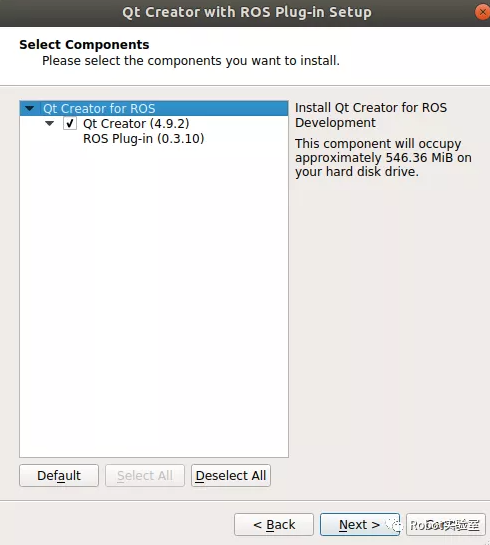
4. 選擇安裝路徑,勾選 Qt Creator,然后點擊繼續;
:-: 
:-: 
5. 安裝成功后,可以點擊桌面左上角,搜索Qt就可以找到圖標,雙擊運行即可打開軟件;
:-: 
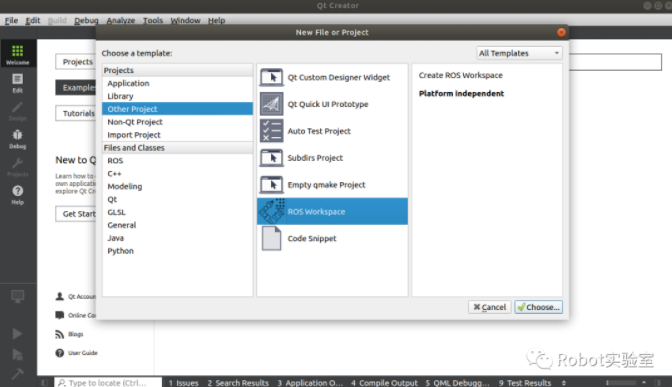
我們可以點擊 File 》 new File or Project,點擊Other Project,我們可以在左邊看到 ROS Workspace,這里我們可以導入創建好的ROS工作空間;
:-: 
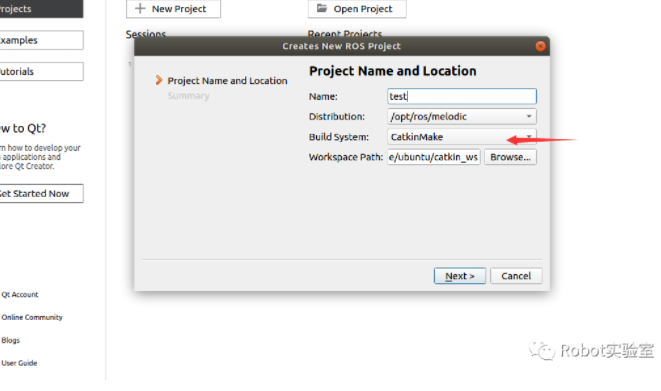
我們需要提前創建好ROS的工作空間(QtCreator無法創建工作空間,只可以導入),這里我創建的是catkin\_ws,選擇catkin\_ws,然后寫上一個自己喜歡的名字,這里我寫的是test。將Build System選擇為CatkinMake(如果采用beta版的Catkin\_tool才選為Catkintool編譯);
:-: 
點擊繼續完成工作空間的導入;
:-: 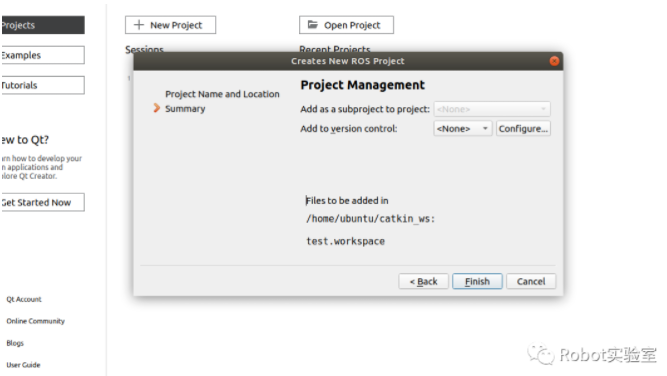
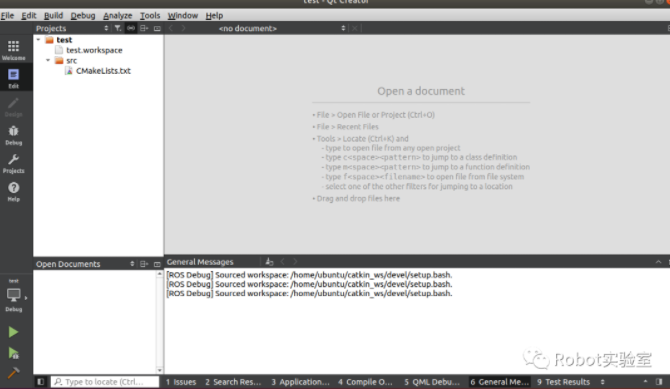
導入ROS工作空間成功的界面如下,于是可以通過qt creator方便的進行ROS開發啦?。如果在安裝該插件的過程中有任何疑問,歡迎反饋交流!
:-: 
Enjoy it.
[機器人實驗室 https://roboticslab.cn](https://roboticslab.cn/)
:-: 
