## 一、平臺概述
:-: 
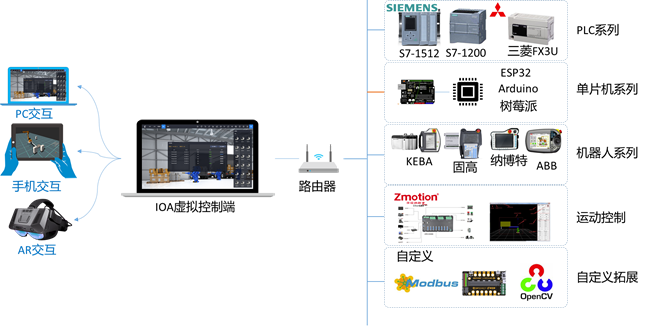
IOA綜合實訓平臺是一套集成了,機器人、運動控制、嵌入式、物聯網以及智能MES控制系統的一體化系統平臺,該平臺包含了幾乎所有制造產線的功能單元模塊及應用,涉及有多個專業學科的交叉應用,并且結合AR及VR的仿真能夠實現沉浸式體驗和教學展示應用;
該系統平臺采用半實物 \+ 虛擬控制器 \+ 3D仿真方式,并且結合智能控制的MES系統,能夠進行從智能工廠的從設備層、驅動層、控制層、管理層、應用層的五層架構所有環節的開發,并提供了100+課時教材,包含了從工業機器人、PLC等控制驅動技術,再到winCC、C#上位機控制,再到數據庫B/S前后端開發最后到云部署及邊緣計算,工業APP開發。
* 開放式智慧工廠綜合實訓臺系統,配套工業機器人控制系統、西門子PLC、運動控制器、嵌入式物聯網共計四種硬件控制系統;
* 配套開放式控制柜+實訓臺+組態液晶屏
* 支持工業互聯網圖形化+VB+C+組態語言硬件編程
* 配套全套工業互聯網管理及控制應用的課程案例資源
* 1:1可編輯虛擬產線互動編程
* 開放式MES系統+100課時資源包
## 二、模塊化控制系統
綜合數字孿生實訓平臺包含了工業機器人、運動控制器以及工業物聯網控制系統等多種控制單元,能夠根據真實的智造產線完成各類復雜和綜合的開發實訓內容,內部配置的控制功能如下:
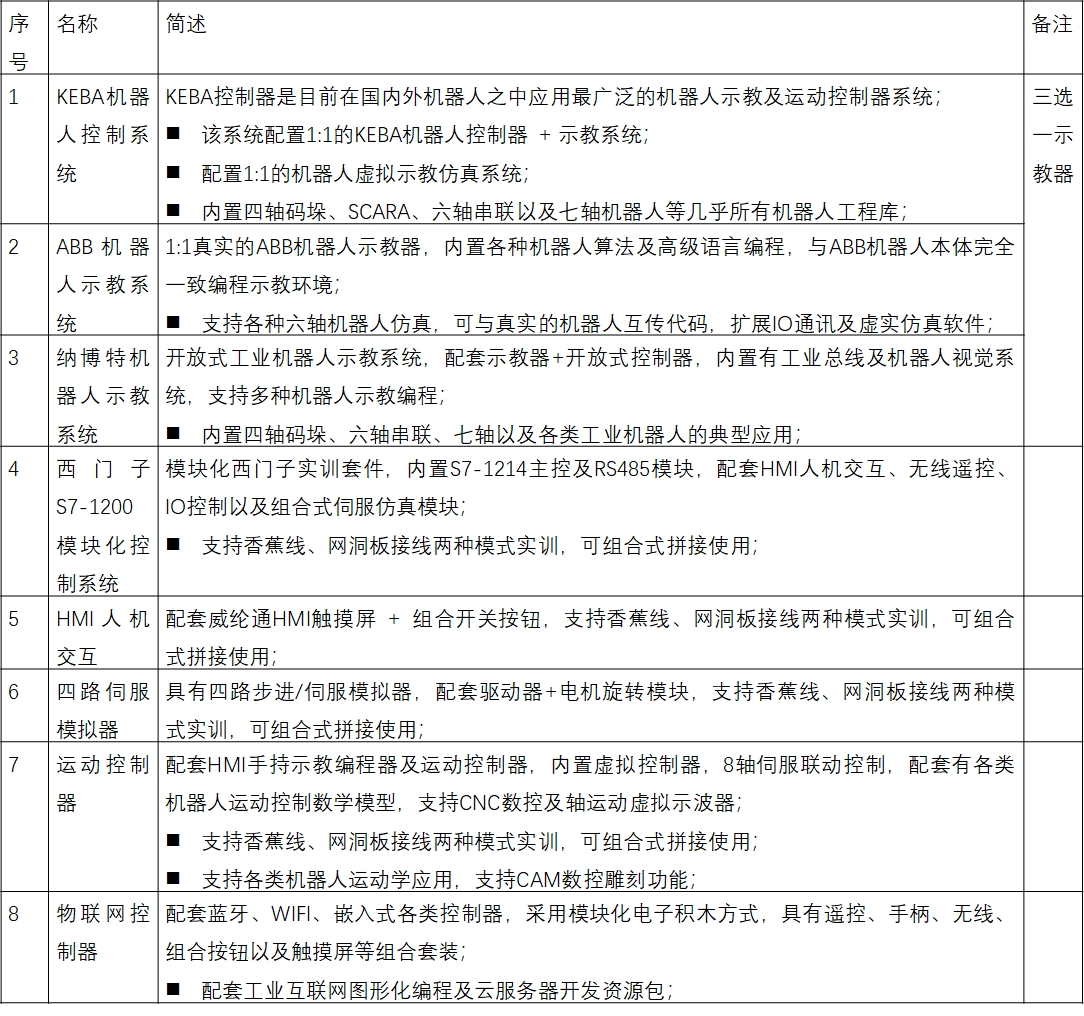
### 1、多種組合控制系統

### 2、核心模塊說明

## 三、數字孿生機器人平臺

## 1、平臺概述
Mirobot機械臂并不是一套獨立的機器人系統,通過與IOA數字孿生結合,**Mirobot****可實現1:1****的虛實孿生機器人應用與控制**,采用數字化仿真控制器以及3D虛擬工廠場景,可實現任意的工業機器人應用及創新應用,不僅僅是物理仿真更將機器人與智能控制應用、場景搭建、系統集成以及數字化控制全部融入在內,真正實現智能制造工業4.0教學的理實虛一體化教學創新應用;
通過與 **IOA數字孿生系統結合**,Mirobot機械臂不僅僅在機器人的典型應用工作站能夠編程開發,更能夠結合IOA數字孿生實現:
* 1:1的虛擬化仿真,自定義拖拽式的設計機器人工作站產線;
* 1:1的虛實孿生控制仿真;
* 與實體工作站對應,能夠實現人手一機產業結合的仿真應用;
## 2、機器人特點
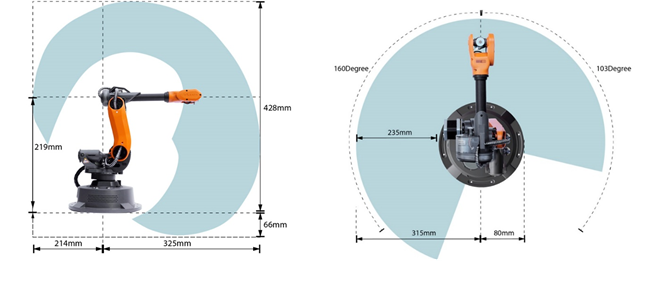

Mirobot機械臂是一款安全易用的迷你六軸桌面工業機器人,是一款開放式AI機器人綜合教學平臺。該機器人采用高精度伺服和步進驅動,采用1:1的仿生結構,機器人具有寫字畫畫、激光雕刻、搬運碼垛等多種功能,預留多個擴展接口支持二次開發,同時支持Python、C、C++、Java等編程語言。
機器人具有PC端軟件、手機APP、藍牙示教器多種控制方式,自由設定動作、任意添加夾具,滿足不同應用和機器人學習開發的需求。
* 專業:高精度:Mirobot設計參考工業常用六軸機械臂原型,具備空間全向移動特點,致力于打造更真實的教學設備。采用先進的運動學算法,重復定位精度達0.2mm,滿足實訓研究精準執行。
* 人手一機:安全可靠:整機總重量僅1.5Kg,底盤直徑160mm。一體化設計,體輕身小,讓學生在課堂也能體驗到實踐的樂趣。
* 開源:可擴展:Mirobot作為首款迷你桌面級教育機械臂,為學生學習提供開源的運動學、視覺等算法。同時設備預留多個擴展接口,支持Python、C、C++、Java等多種編程語言,為學生學習創新提供全新的創新學習平臺。
* **數字孿生:Mirobot 配置了1:1 的數字孿生仿真模型在IOA 之中,具有虛擬仿真 \+** **虛實仿真功能特點,能夠采用虛擬 \+** **實體方式實現機器人本體 \+** **智能控制的數字孿生集成應用;**
## 四、配套工業互聯網MES系統

IOA系統仿真具有一套開源的MES系統,從設備層、控制層、數據層、應用層都具有對應開發及實踐內容,通過PLC + 機器人 +計算機軟件的模式提供一套完整的數字化產線的,建設、編程、電氣再到上層控制的綜合型開發平臺。
IOA虛擬仿真按照實驗室已有的真實化產線可1:1搭建虛擬化系統,并配套完整的從認知到產線應用的階段化開發課程資源,全面詳細的介紹了數字化產線構成以及集成方式,并通過虛擬仿真技術創建與真實完全一致的虛擬產線,直接進行虛擬仿真調試。特色在于,通過將PLC、工業機器人、計算機軟件控制技術結合,分單元分層講解數字化產線的各個層級個功能的實施及編程控制方法,并能夠以虛擬仿真加以展示及實現;
