
***
## VSR-UNO控制器
VSR-UNO控制器使用Atmega328P單片機,高性能、低功耗AVR 8位微控制器。VSR-UNO有14個數字輸入/輸出引腳(其中6個可用于PWM輸出)、6個模擬輸入引腳,一個16 MHz的晶體振蕩器,一個USB接口,一個DC接口,一個ICSP接口,一個復位按鈕。它包含了微控制器所需的一切,你只用簡單地把它連接到計算機的USB接口,或者使用AC-DC適配器,再或者用電池,就可以驅動它。
## VSR-UNO虛實孿生

通過Mixly圖形化編程軟件或ArduinoIDE開發,簡單快速高效的完成程序開發。VSR-UNO通過USB連接到電腦,與VS-Robot進行虛實孿生仿真。使用真實的單片機系統控制虛擬的場景。
## 技術參數
| 型號 | VSR-UNO |
| --- | --- |
| 微控制器 | ATmega328P |
| 工作電壓 | 5 V |
| 輸入電壓(推薦) | 7-12 V |
| 輸入電壓(極限) | 6-20 V |
| 數字I/O引腳 | 14 |
| PWM通道 | 6 |
| 模擬輸入通道(ADC) | 6 |
| 每個I/O直流輸出能力 | 20 mA |
| 3.3V端口輸出能力 | 100 mA |
| Flash | 32 KB(其中引導程序使用0.5 KB) |
| SRAM | 2 KB |
| EEPROM | 1 KB |
| 時鐘速度 | 16 MHz |
| 板載LED引腳 | 13 |
| 長度 | 76.2 mm |
| 寬度 | 53.4 mm |
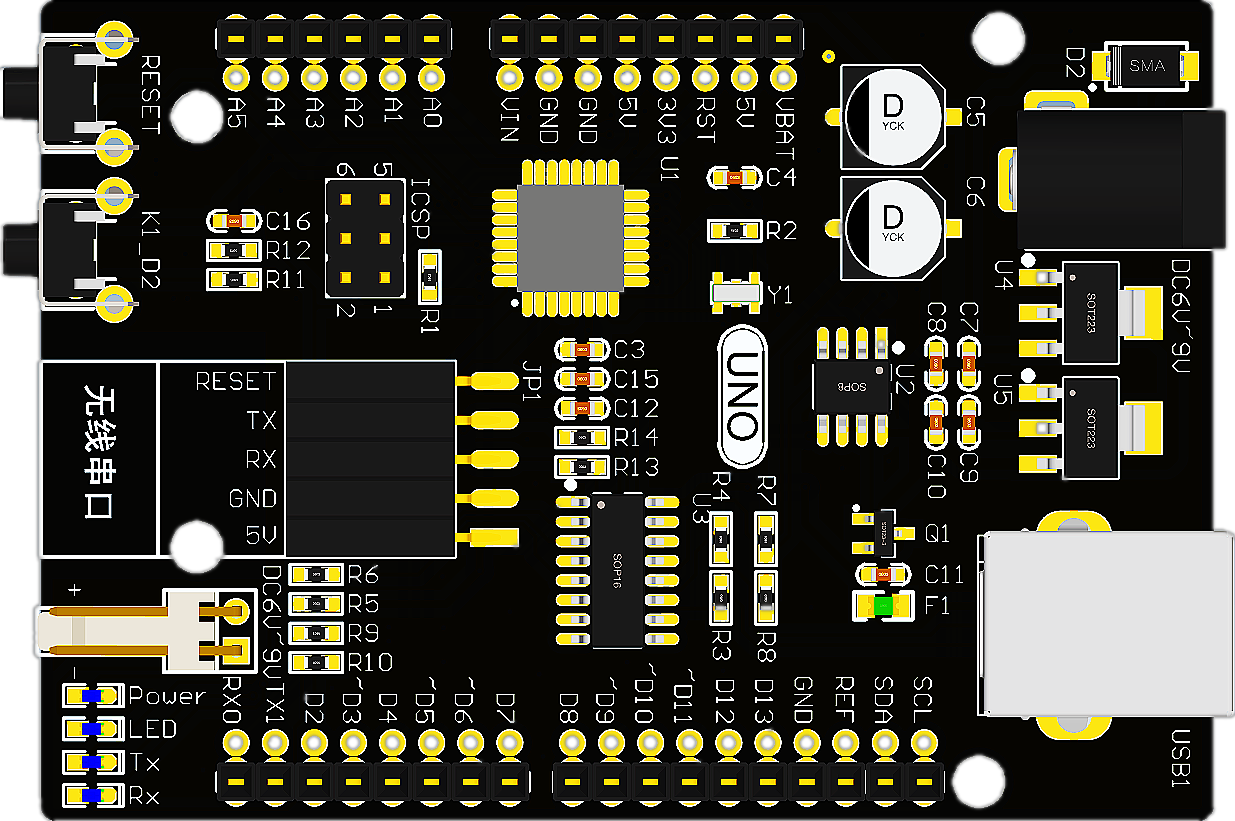
## 電源
可以通過USB口或者直流電源座給VSR-UNO供電。VSR-UNO帶有自動切換電源功能。
電源引腳如下:
**Vin**
電源輸入引腳。當使用外部電源通過DC電源座供電時,這個引腳可以輸出電源電壓。
**5V**
5V電源引腳。使用USB供電時,直接輸出USB提供的5V電壓;使用外部電源供電時,輸出穩壓后的5V電壓。
**3V3**
3.3V 電源引腳。最大輸出能力為50 mA。
**GND**
接地引腳
**IOREF**
I/O參考電壓。其他設備可通過該引腳識別開發板I/O參考電壓。
## 存儲空間
ATmega328 有32KB Flash存儲空間(其中0.5KB被用于存儲bootloader),2KB 的SRAM和1KB 的EEPROM。可以使用EEPROM庫讀寫EEPROM空間。
## 輸入輸出
VSR-UNO有14個數字輸入輸出引腳,
其中一些帶有特殊功能,這些引腳如下:
**Serial(串口)**:
0(RX)、1(TX),引腳被用于接收和發送串口數據。這兩個引腳通過連接到CH340來與計算機進行串口通信。
**外部中斷:**
2、3,引腳可以輸入外部中斷信號。中斷有四種觸發模式:低電平觸發、電平改變觸發、上升沿觸發、下降沿觸發。
**PWM輸出:**
3、5、6、9、10、11,引腳可用于輸出8-bit PWM波。
**SPI:**
10(SS)、11(MOSI)、12(MISO)、13(SCK),引腳可用于SPI通信。
**LED:**
13號引腳連接了一個LED,當引腳輸出高電平時打開LED,當引腳輸出低電平時關閉LED。
**I2C:**
A4(SDA)、A5(SCL)接口,可用于I2C通信。
**模擬輸入:**
VSR-Uno 6個模擬輸入引腳,每個模擬輸入都有10位分辨率(即1024個不同的值)。默認情況下,模擬輸入電壓范圍為0~5V,可使用 AREF引腳和軟件編程設置其他參考電壓。
相關引腳如下:
**AREF:**
模擬輸入參考電壓輸入引腳。
**Reset:**
復位端口。接低電平會使Arduino復位,復位按鍵按下時,會使該端口接到低電平,從而讓VSR-UNO復位。
## 指示燈(LED)
VSR-UNO帶有4個LED指示燈,作用分別如下:
**Power:**
電源指示燈。當VSR-UNO通電時,Power燈會點亮。
**TX:**
串口發送指示燈。當使用USB連接到計算機且VSR-UNO向計算機傳輸數據時,TX燈會點亮。
**RX:**
串口接收指示燈。當使用USB連接到計算機且VSR-UNO接收到計算機傳來的數據時,RX燈會點亮。
**LED:**
可編程控制指示燈。該LED通過特殊電路連接到VSR-UNO的13號引腳,當13號引腳為高電平或高阻態時,該LED 會點亮;低電平時,不會點亮。可以通過程序或者外部輸入信號,控制該LED亮滅。
## 通信
VSR-UNO具備多種通信接口,可以和計算機、其他VSR-UNO或者其他控制器通信。
ATmega328P 提供了UART TTL (5V)串口通信,其位于0 (RX) 和1 (TX)兩個引腳上。VSR-UNO上的CH340將串口轉換成USB,使得ATmega328P 能和計算機通信。VSR-UNO上的RX\\TX兩個LED可以指示當前VSR-UNO的通信狀態。
ATmega328P也支持I2C (TWI)和SPI通信。
## 自動復位
一些開發板在上傳程序前需要手動復位,而UNO的設計不需要如此,在UNO連接電腦后可以由程序控制其復位。在CH340上的DTR信號端,經過一個100nf 的電容,連接到ATmega328 的復位引腳。
當計算機發出DTR信號時(低電平),復位端將得到一個足夠長的脈沖信號,從而復位ATmega328。在Arduino IDE中點擊上傳程序,在上傳前即會觸發復位,從而運行引導程序,完成程序上傳。
- VS-Robot簡介
- 機器人等級與課程
- 我的機器人世界
- 快速上手與使用
- 控制與編程
- 多人協作與VR
- Py-Tech機器人編程
- 什么是Py-Tech
- Py-Tech編程語法
- 探索與發現
- VSR電子積木編程
- 認識VSR電子積木
- UNO控制器
- ESP32控制器
- 擴展Arduino-mega控制器
- 擴展接口板
- 人機交互配件
- Arduino-UNO編程與搭建
- Arduino-Mega編程與搭建
- ESP32物聯網與編程
- Python編程與二次開發
- 如何搭建Python編程
- VSR-Python編程語法
- VSR-Python與視覺
- VSR-KATA機器人
- 認識KATA機器人
- 編程與控制
- 創新與應用
- 科技工廠創作案例
- 讓你的工廠動起來
- 讓工廠更聽話
- 永不疲倦的機器人
- 會自己移動的小車
- 創作一個智能的科技工廠
- Arduino-uno編程與仿真
- VSR-UNO控制器
- UNO與Mixly
- Arduino-mega編程與仿真
- mega控制器
- mega與Mixly
- Python編程與控制
- python編程工具
- 基礎模塊
- 虛擬工廠模塊
- 物聯網模塊
- 環境搭建
- ESP32編程與控制
- ESP32與VSR
- ESP32-S物聯網基礎控制器
- ESP32-R機器人物聯網控制
- 帶上VR眼鏡進入我的機器人世界