
***
## Python虛擬控制器環境搭建
安裝包下載,除了使用VS-Robot 內嵌的圖形化Python編程外,也可以通過自行搭建的Python環境,通過調用ZtModTcp.py實現Python虛擬控制器。
鏈接:https://pan.baidu.com/s/1PCNi23dus9ra1q4kduxySA
提取碼:z51m
**1.python安裝**
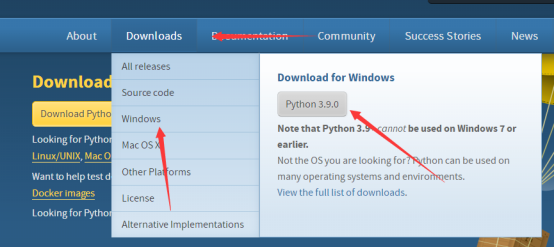
在https://www.python.org/downloads/ 官網下載3.7以上版本python安裝包。
或下載我們打包好的Python安裝包和庫安裝包
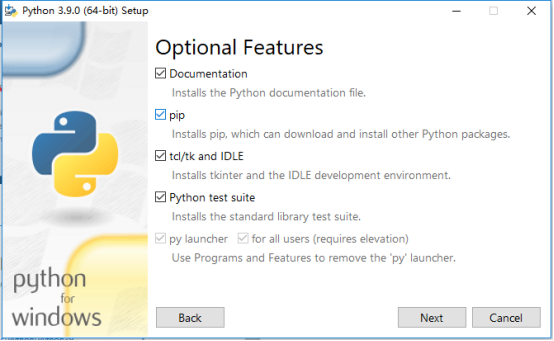
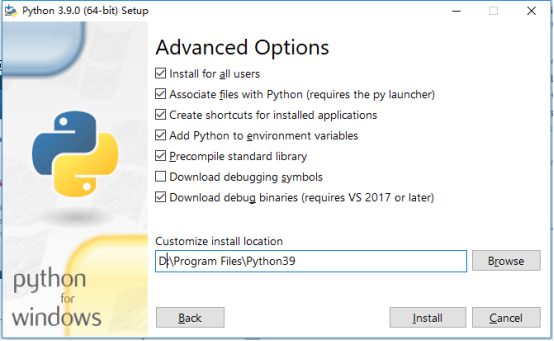
以管理員身份運行安裝包

安裝完成后打開cmd 命令提示符
輸入python 出現入下界面,表示安裝成功
**2.ZtModTcp.py庫安裝**
.ZtModTcp庫是基于modbus_tk 庫編寫的,安裝前先安裝modbus_tk庫
modbus_tk庫安裝有兩種方法,
方法一:
打開CMD命令提示符,輸入
```
pip install modbus_tk
```
指令,系統自動下載安裝modbus_tk庫;
方法二:
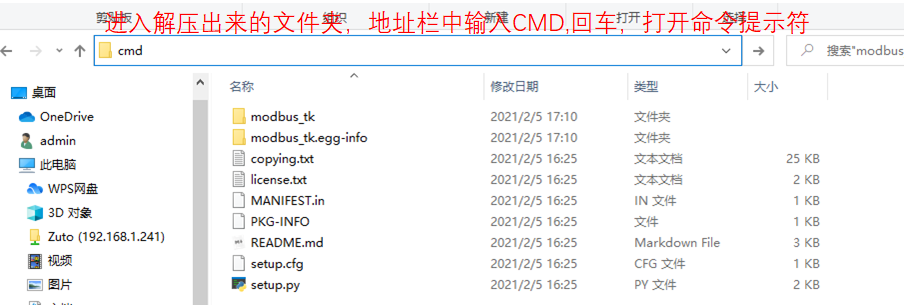
百度網盤下載下來的按照包有一個modbus_tk(ZtModTcp).zip壓縮文件,
將modbus_tk-1.1.2.tar.gz文件解壓后,打開modbus_tk-1.1.2文件夾,在地址欄中輸入CMD,回車,打開命令提示符,進入文件目錄。
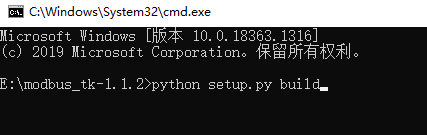
執行下面命令
```
python setup.py build
```
```
python setup.py install
```
安裝完modbus_tk庫后,
將下載下來的ZtModTcp.py復制粘貼到python安裝目錄‘Python39\Lib’下即可。
到此,Python虛擬控制器的運行環境搭建完成。
- VS-Robot簡介
- 機器人等級與課程
- 我的機器人世界
- 快速上手與使用
- 控制與編程
- 多人協作與VR
- Py-Tech機器人編程
- 什么是Py-Tech
- Py-Tech編程語法
- 探索與發現
- VSR電子積木編程
- 認識VSR電子積木
- UNO控制器
- ESP32控制器
- 擴展Arduino-mega控制器
- 擴展接口板
- 人機交互配件
- Arduino-UNO編程與搭建
- Arduino-Mega編程與搭建
- ESP32物聯網與編程
- Python編程與二次開發
- 如何搭建Python編程
- VSR-Python編程語法
- VSR-Python與視覺
- VSR-KATA機器人
- 認識KATA機器人
- 編程與控制
- 創新與應用
- 科技工廠創作案例
- 讓你的工廠動起來
- 讓工廠更聽話
- 永不疲倦的機器人
- 會自己移動的小車
- 創作一個智能的科技工廠
- Arduino-uno編程與仿真
- VSR-UNO控制器
- UNO與Mixly
- Arduino-mega編程與仿真
- mega控制器
- mega與Mixly
- Python編程與控制
- python編程工具
- 基礎模塊
- 虛擬工廠模塊
- 物聯網模塊
- 環境搭建
- ESP32編程與控制
- ESP32與VSR
- ESP32-S物聯網基礎控制器
- ESP32-R機器人物聯網控制
- 帶上VR眼鏡進入我的機器人世界