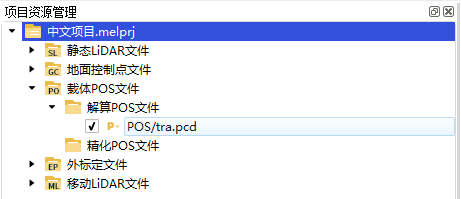
說明:對一般用戶,僅需關注“移動LiDAR文件”,將相關文件添加即可快速體驗。
#### 添加靜態LiDAR文件
**功能描述**:加載靜態LiDAR文件,分為“原始LiDAR文件”、“解算LiDAR文件”,即已經解算為標準點云格式文件以及“用戶LiDAR文件”。
支持的文件數據格式包括Rigel原始文件(\*.rxp)、LAS文件(\*.las)、PCL文件(\*.pcd)等。
**步驟**:
1. 在項目資源管理窗口中選中要添加文件的項目,點擊彈出靜態LiDAR文件添加界面,選擇“文件類型”和“傳感器類型”后,點擊“導入”,選擇相應的數據進行添加。對于誤加載的數據,可以選中后點擊,將其除去。
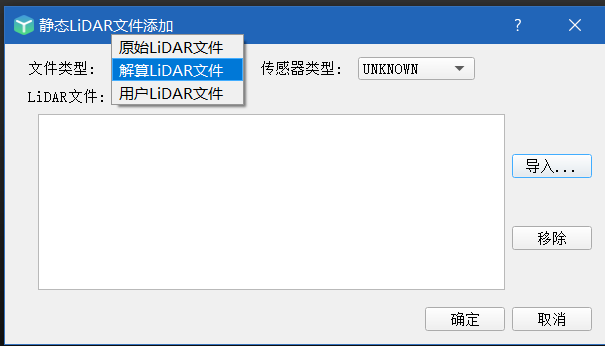
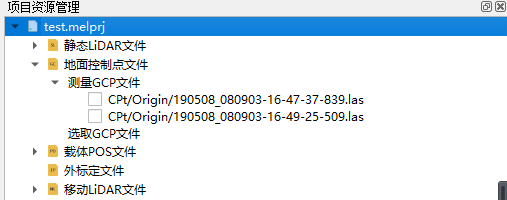
1. 點擊“確定”完成數據添加,添加后的數據自動加載顯示在項目資源管理窗口中。
說明:
- 原始LiDAR文件:靜態激光掃描儀的未解算文件,由于本公司尚未完成該型產品開發,目前暫時不支持文件輸入;
- 解算LiDAR文件:該文件為已經解算文件格式,文件支持\*.las以及\*.CBD文件格式;
- 用戶LiDAR文件:該文件指用戶處理后文件,文件格式支持\*.cbd、\*.las、\*.ply、\*.pcd等文件格式。
#### 添加移動LiDAR文件
**功能描述**:加載移動LiDAR文件,支持的文件數據格式包括\*.rxp、\*.pcap、\*.cbd、\*.ply、\*.las、\*.pcd等。
**步驟**:
與添加靜態LiDAR文件不同在于,移動LiDAR文件增加了精化LiDAR文件,該文件為通過本軟件提供的“精化模塊”處理之后的文件,為與其他文件區分開,避免造成數據不可恢復而增加的文件模塊。
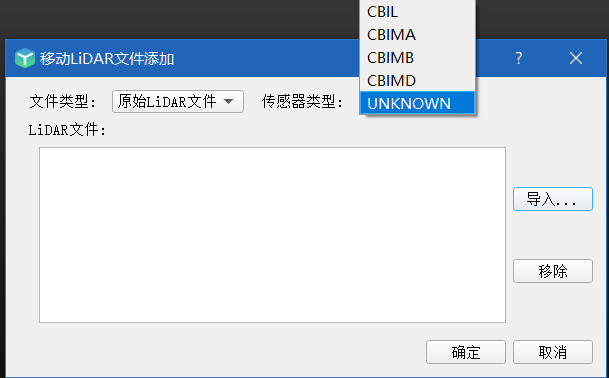
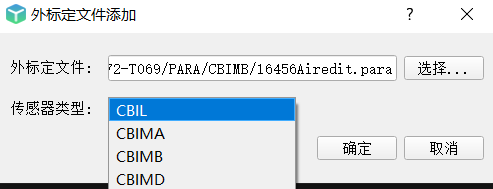
傳感器類型目前支持4種傳感器以及對于第三方激光雷達處理之后的數據“UNKNOWN”。
- CBIL:該型號為奧倫達科技開發的單線長測程激光雷達,CBI-250/420/1350等產品;
- CBIA/B/D:為奧倫達科技先發的多線激光雷達產品,CBI-100/120/200等產品,若購買本公司產品,請務必對照用戶手冊進行相關傳感器選擇。
- UNKNOWN:第三方傳感器或者第三方激光雷達數據。
說明:傳感器類型僅影響數據解算,即購買本公司產品的用戶,在添加原始LiDAR文件時,務必根據用戶手冊添加,錯誤添加會導致數據解算錯誤。Ru’yo
#### 添加地面控制點文件
**功能描述**:加載地面控制點文件,支持的文件數據格式為LAS文件(\*.las)。
**步驟**:
1. 在項目資源管理窗口中選中要添加文件的項目,點擊彈出地面控制點文件添加界面,選擇“文件類型”后,點擊“導入”,選擇相應的數據進行添加。對于誤加載的數據,可以選中后點擊,將其除去。
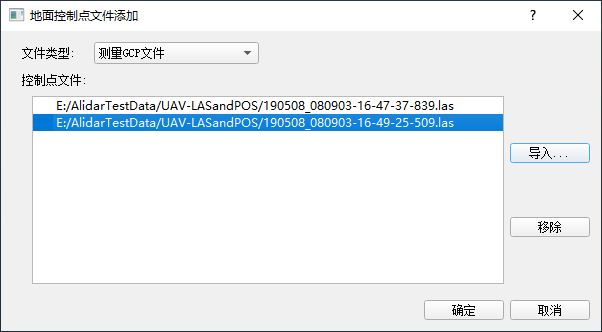
1. 點擊“確定”完成數據添加,添加后的數據自動加載顯示在項目資源管理窗口中。
#### 添加外標定文件

功能描述:加載外標定文件,支持的文件數據格式為外標定文件(\*.para)。該文件僅與購買本公司硬件產品用戶相關,其余用戶請忽略。
**步驟**:
1. 在項目資源管理窗口中選中要添加文件的項目,點擊彈出外標定文件添加界面,“選擇”需要加載的外標定文件數據,設置相應的“傳感器類型”。
1. 點擊“編輯”設置外標定參數,標定參數可以用戶手動輸入,也可以點擊“讀取”自動讀入。參數設置完成后,點擊“保存”保存設置的參數。(該功能僅對代理服務商提供)。
2. 點擊“確定”完成數據添加,添加后的數據自動加載顯示在項目資源管理窗口中。
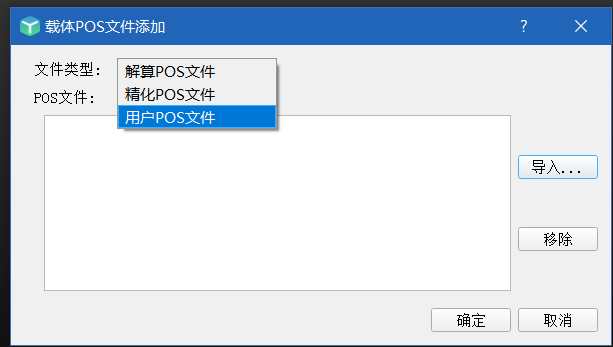
#### 添加載體POS文件
**功能描述**:加載載體文件,支持的文件數據格式為PCD文件(\*.pcd)。
**步驟**:
1. 在項目資源管理窗口中選中要添加文件的項目,點擊彈出載體POS文件添加界面,選擇“文件類型”后,點擊“導入”,選擇相應的數據進行添加。導入文件類型有原始POS文件(\*.post/txt等)以及解算后pcd格式,針對post文件,軟件會自動轉換為pcd格式。對于誤加載的數據,可以選中后點擊,將其除去。針對一般用戶,僅關注解算POS文件。
1. 點擊“確定”完成數據添加,添加后的數據自動加載顯示在項目資源管理窗口中。