#### 地面點濾波
**功能描述**:
用于提取地面點云。此算法源自張吳明教授團隊提出的布料模擬濾波算法。參考論文《An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation.》,通過布料模擬下落的方式實現地面點云的提取。在此感謝張教授及其團隊提出算法并免費開源。
若想了解更多關于布料濾波算法可訪問(<http://ramm.bnu.edu.cn/>)。
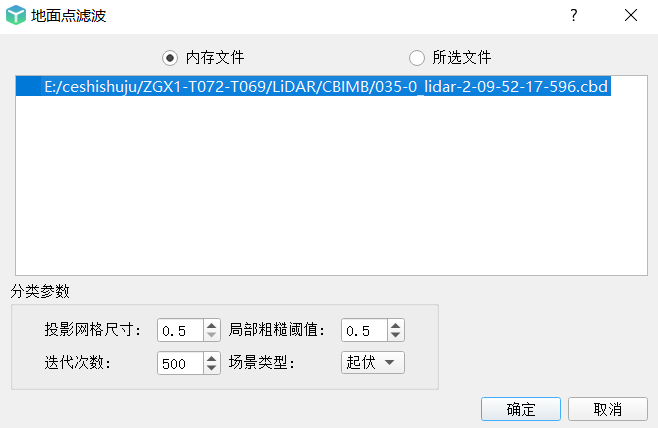
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
投影網格尺寸:(默認0.5m)布料投影網格的分辨率,尺寸設置越小,分辨率越高,提取地面越精細,但耗時也會相應增加。
局部粗糙閾值:(默認0.5m):區域的高差閾值,高差在此范圍之內的點云判斷為地面。
迭代次數:(默認500次)多次重復提取地面,迭代次數越高,生成地面越精細,但耗時也會相應增加。
場景類型:(默認“起伏”)針對實際地形地勢進行選擇,有“平坦”、“起伏”、“陡峭”三種地形可供選擇。
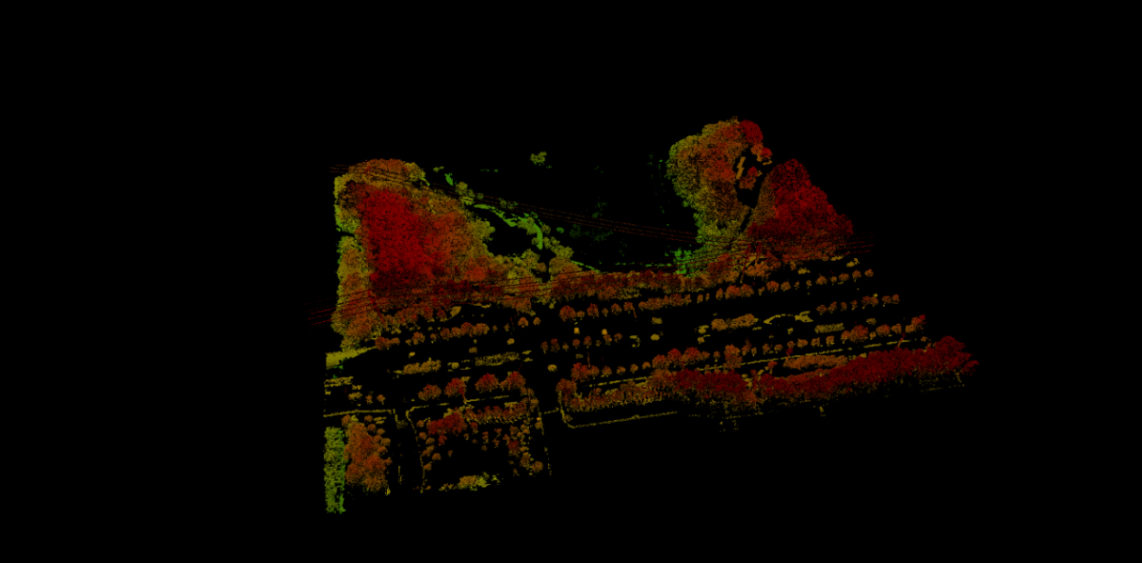
原始點云數據:
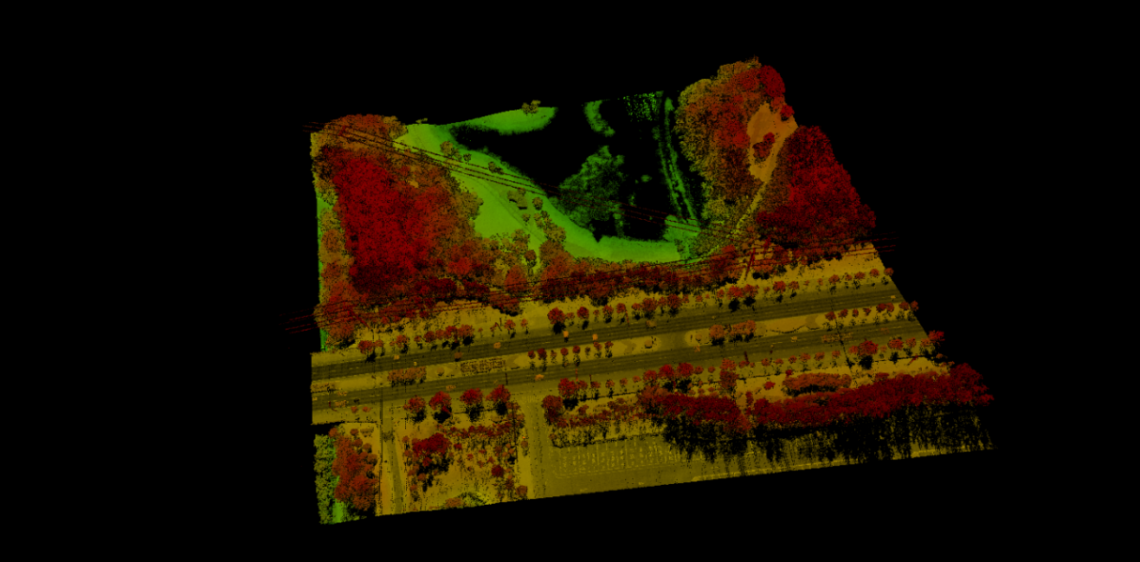
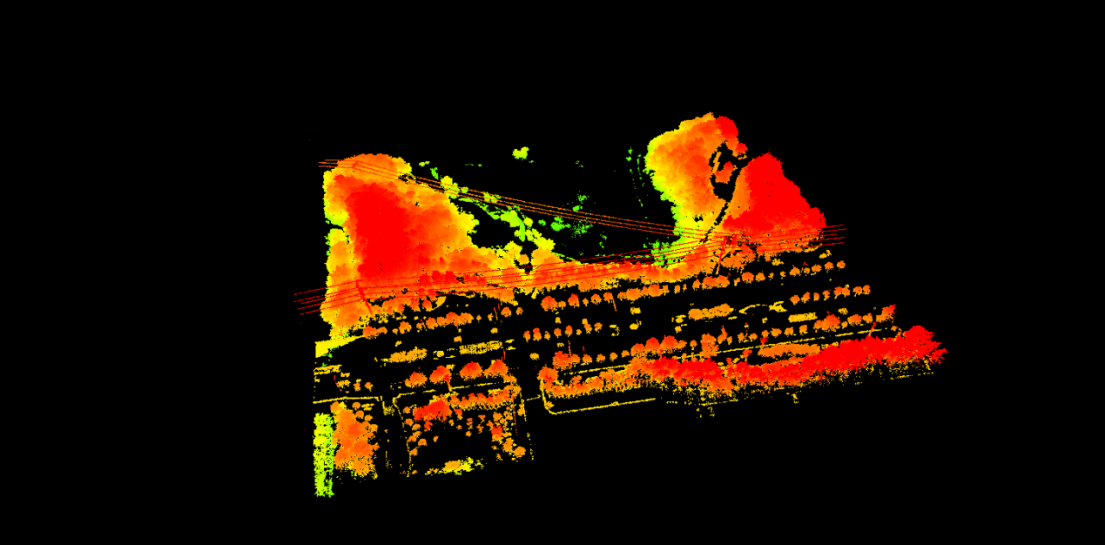
濾除地面后的地物點云數據:
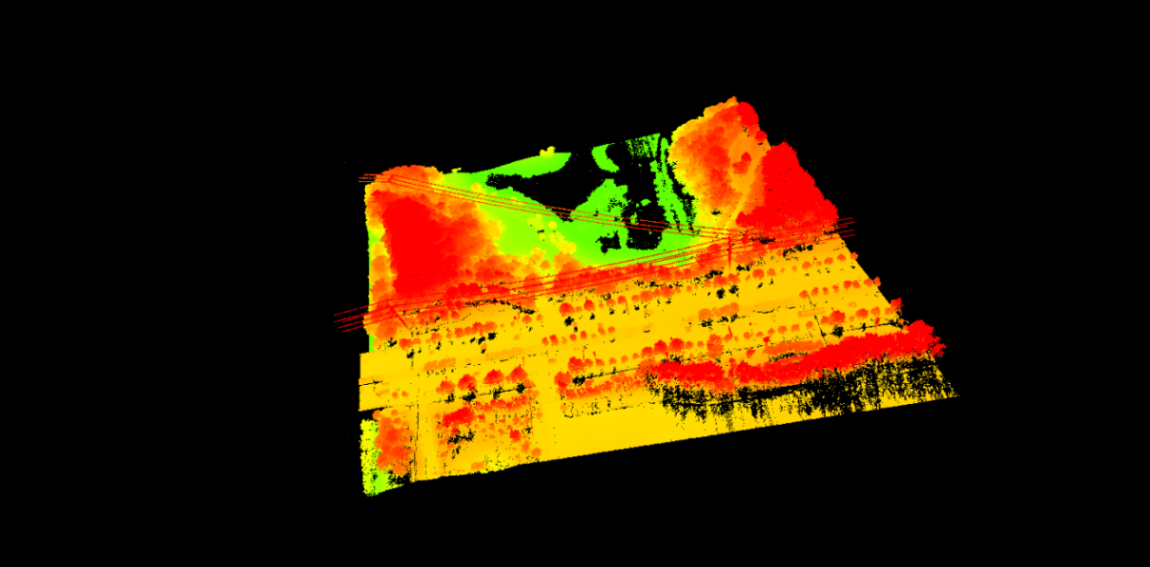
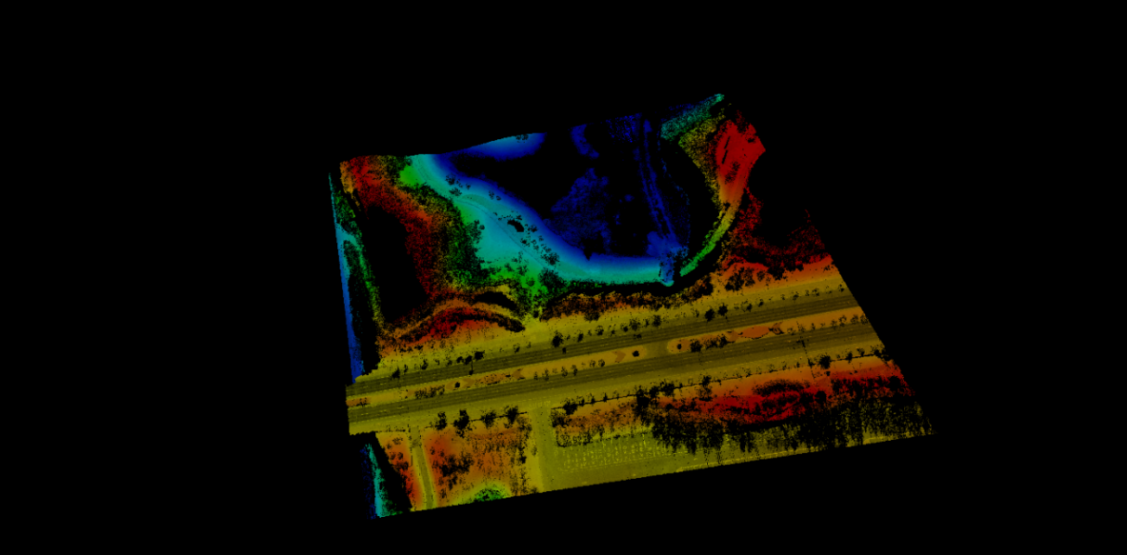
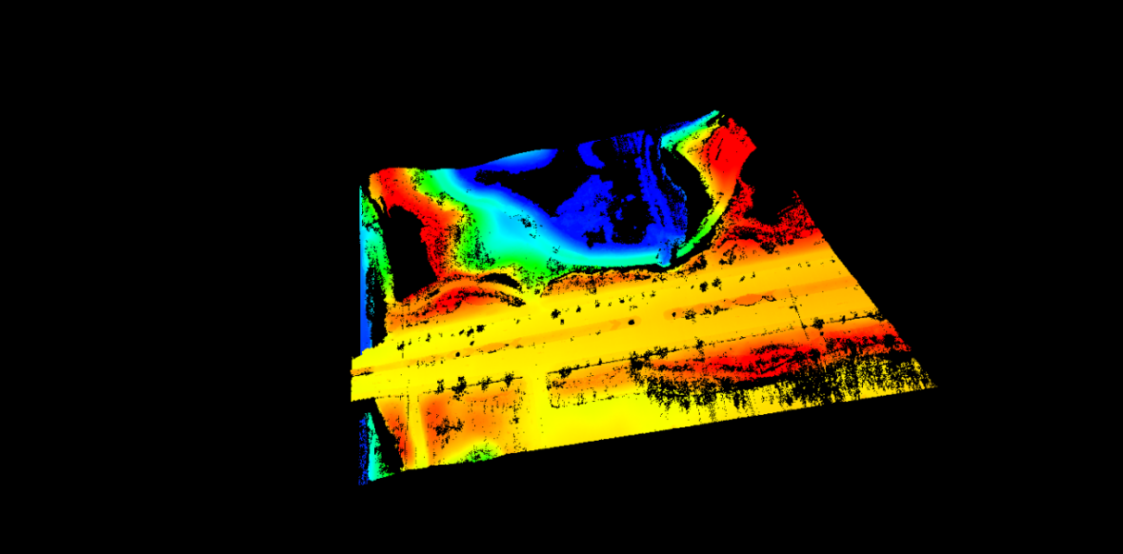
濾出的地面點云數據:
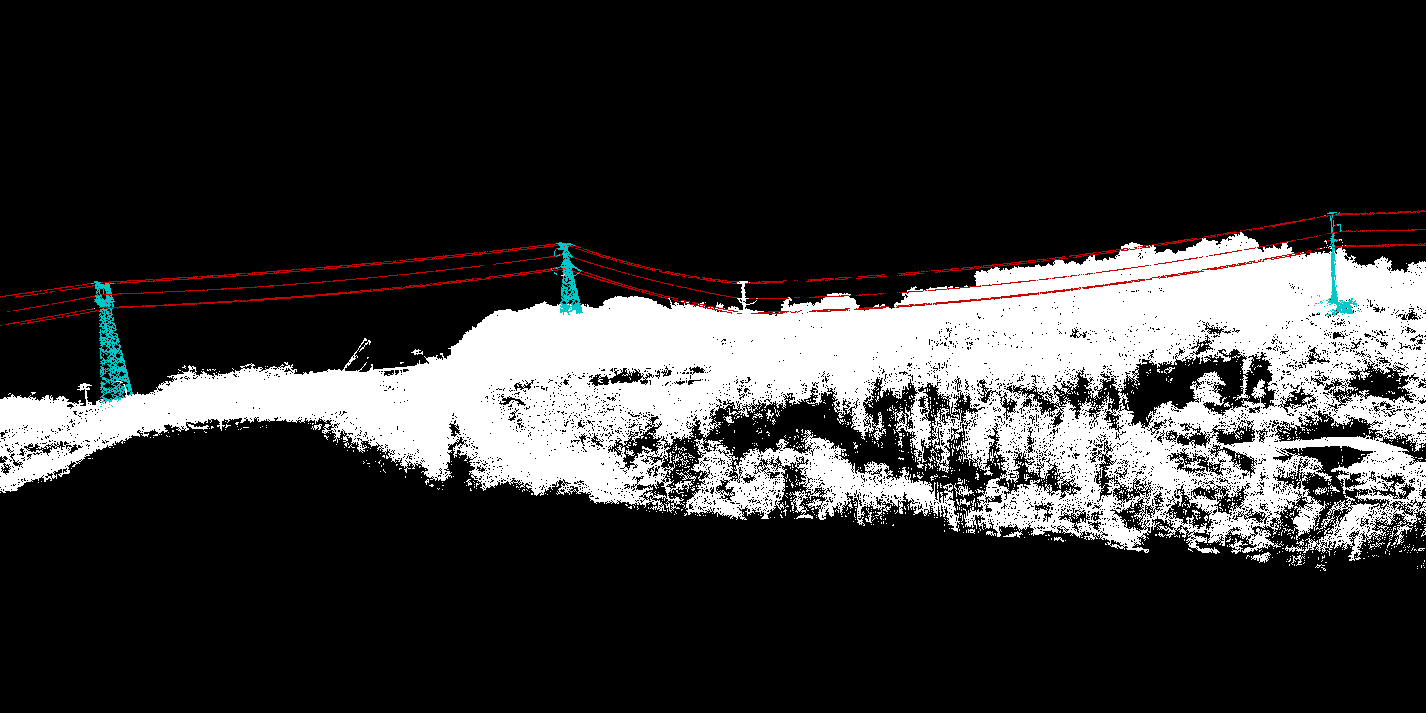
#### 電力線提取
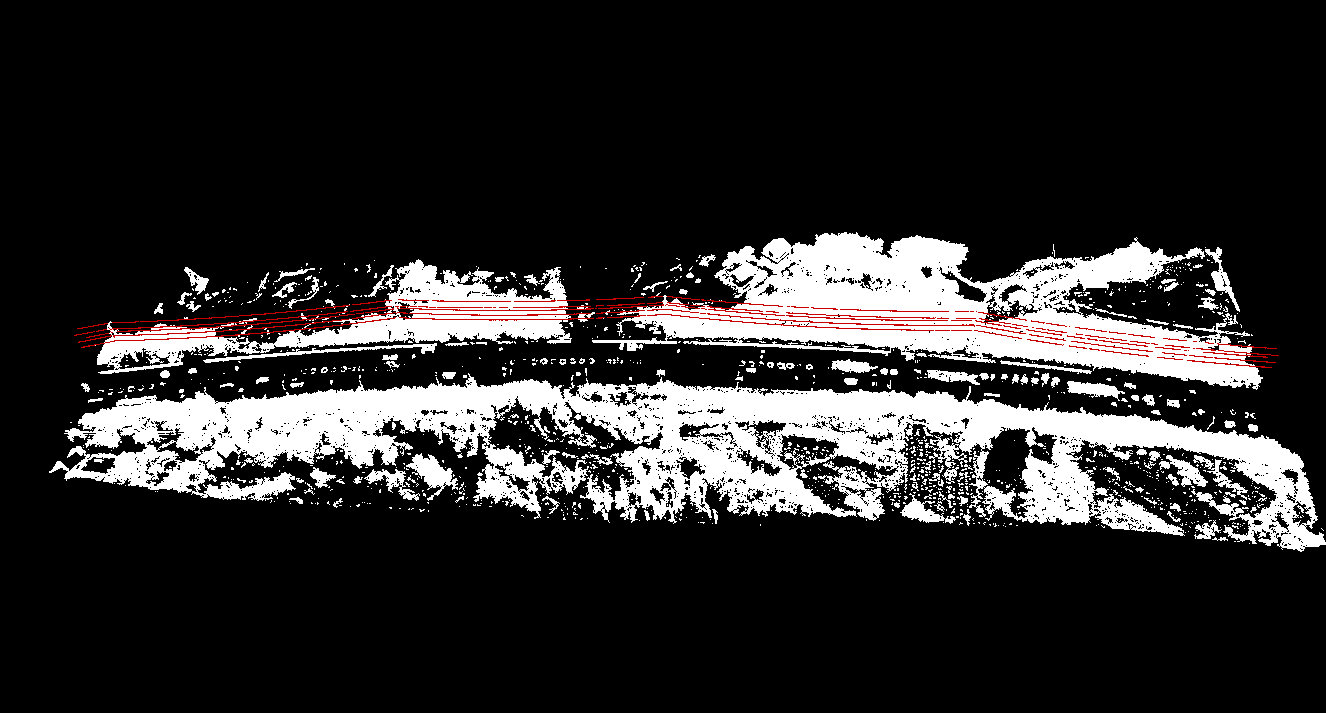
**功能描述**:用于提取電力線點云。此算法根據電力線點云在空間中有較高線性度,將其投影到二維平面進行霍夫變換提取直線,返回三維投影再進行高差濾波進行分類。
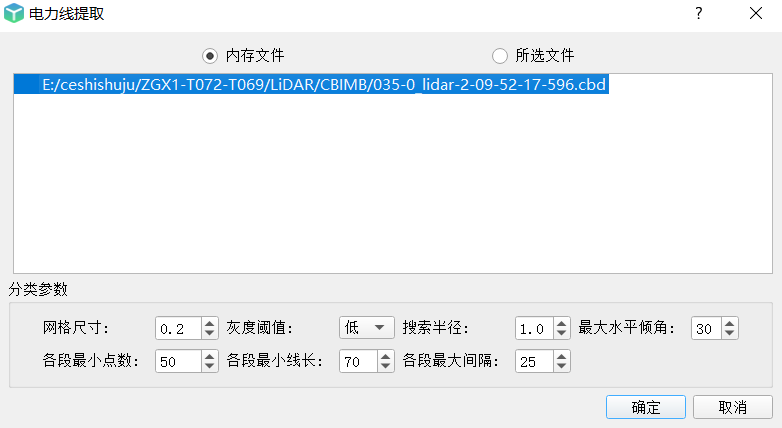
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
網格尺寸:(默認0.2m)投影平面的分辨率,網格越小提取效果越精細,但耗時也會增加。
灰度閾值:高差等投影圖像的灰度閾值,大于灰度閾值的被保留。
搜索半徑:幾何特征計算的領域半徑。
最大水平傾角:電力線與水平面的傾斜角閾值。
各段最小點數:(默認70)判斷電力線所需的最小點數,大于此參數才被劃分為電力線。
各段最小線長:(默認50)判斷電力線所需的最小線長,大于此參數才被劃分為電力線。
各段最大間隔:(默認25)電力線點云中存在漏掃描區域,判斷電力線中點與點間隔距離,小于此間隔距離則判斷為同一條電力線。
#### 電線塔提取
**功能描述**:用于提取電線塔。通過對電力線點云進行鄰近聚類分割,提取出電線塔點云,此功能需在完成電力線提取后,才能對電線塔點云進行分類。
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。