
#### 航帶分割結果
功能描述:對航帶分割的結果進行查看。
步驟:
1\. 點擊按鈕,彈出航帶分割結果查看界面。
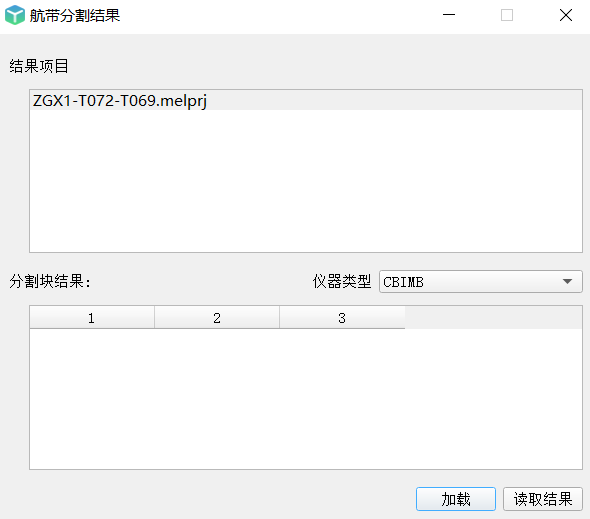
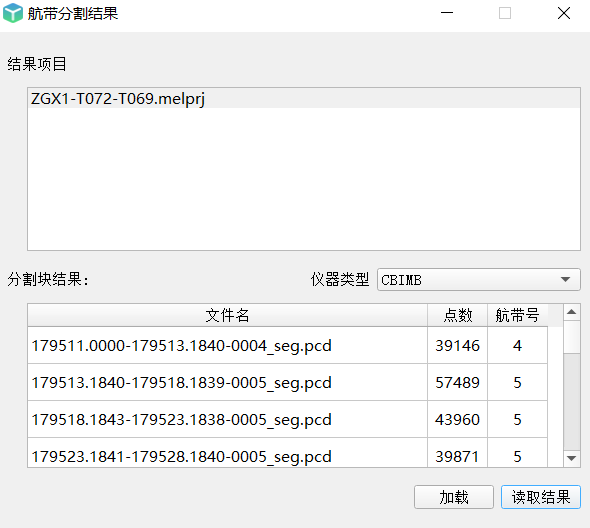
1. 選擇儀器類型,點擊“讀取結果”,加載分割結果信息。
操作設置
讀取結果:將分割結果讀取至分割塊結果信息表。
加載:加載至編輯窗口顯示,可以通過“按航帶”渲染進行查看。
#### 航帶匹配結果
功能描述:對航帶匹配的結果進行查看。
步驟:
1. 點擊按鈕,彈出航帶匹配結果查看界面。
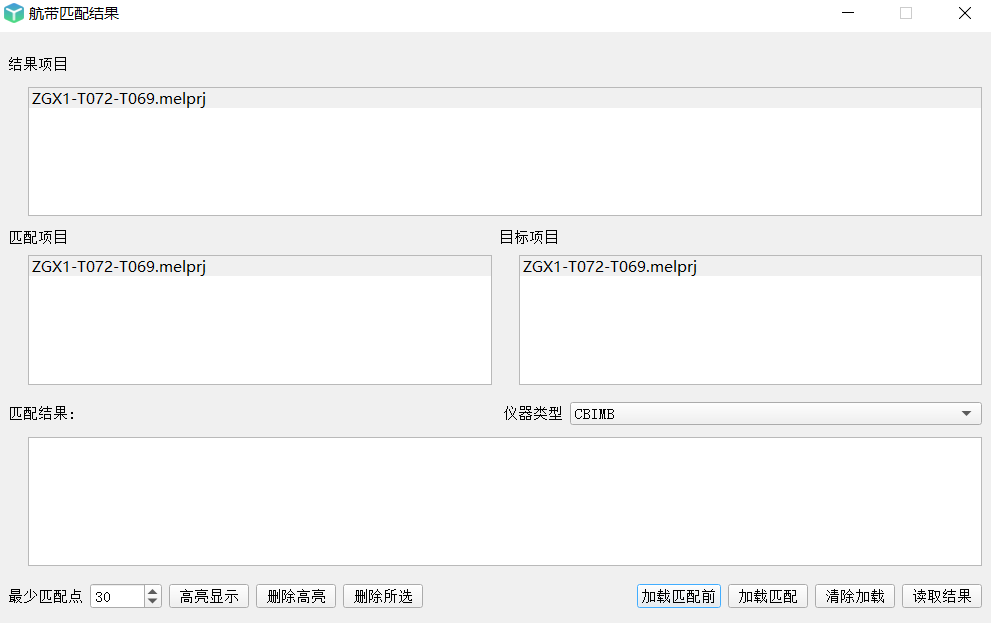
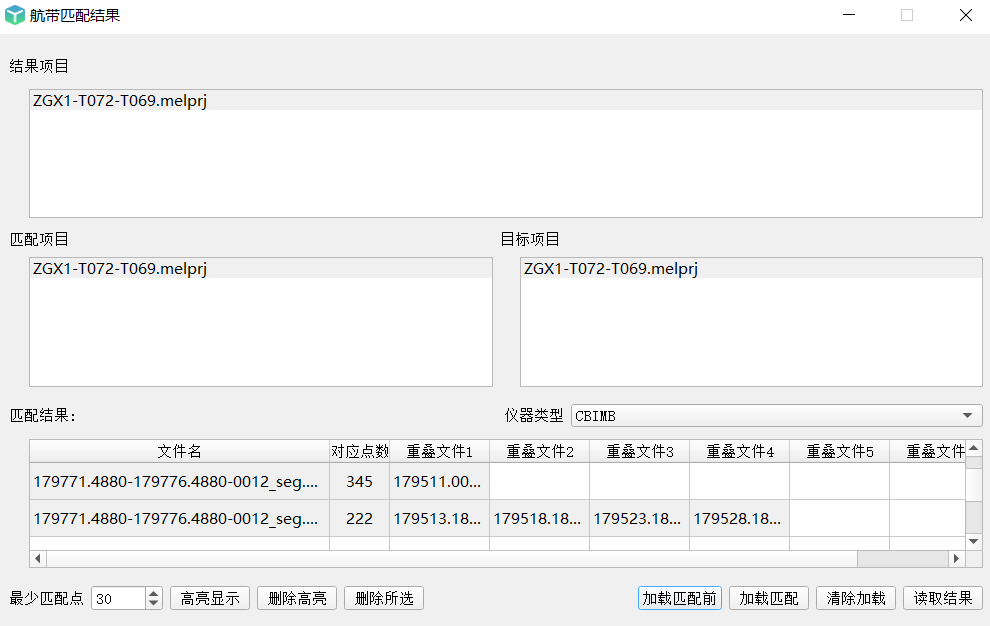
1. 選擇儀器類型,點擊“讀取結果”,加載匹配結果信息。
操作設置
最少匹配點:用于高亮顯示的最少的對應點數。點數為0表示無重疊或者匹配失敗。
高亮顯示:小于最小匹配點數的匹配文件被高亮顯示。
刪除高亮:刪除高亮顯示的匹配文件。
刪除所選:刪除選中的匹配文件。
加載匹配前:將匹配前結果加載到內存并在編輯視圖中顯示,可以通過“按航帶”渲染進行查看。
加載匹配:將匹配后結果加載到內存并在編輯視圖中顯示,可以通過“按航帶”渲染進行查看。
清除加載:清除編輯視圖中顯示的匹配結果。
讀取結果:將匹配結果讀取至匹配結果信息表。
#### 航帶平差結果
功能描述:對航帶平差的結果進行查看。
步驟:
1. 點擊按鈕,彈出航帶平差結果查看界面。

2\. 選擇儀器類型,點擊“讀取結果”,加載平差結果信息。

操作設置
平差前RMSE閾值:平差前均方根誤差。
平差后RSME閾值:平差后均方根誤差,值為-1表示無重疊或者匹配失敗。
高亮顯示:不滿足平差前后RMSE閾值的匹配文件被高亮顯示。
刪除高亮:刪除高亮顯示的匹配文件。
刪除所選:刪除選中的當前匹配文件。
加載匹配:將匹配結果加載到內存并在編輯視圖中顯示。
清除加載:將匹配結果從內存清除并不在編輯視圖中顯示。
讀取結果:將平差結果讀取至平差結果信息表。
