
#### 粗配準
**功能描述**:對有重疊區域的兩組點云數據進行初步配準,為精配準提供良好的初始值。
**步驟**:
1. 在資源項目管理中選擇兩組具有一定重疊區域的點云數據,點擊按鈕,彈出點云粗配準界面。
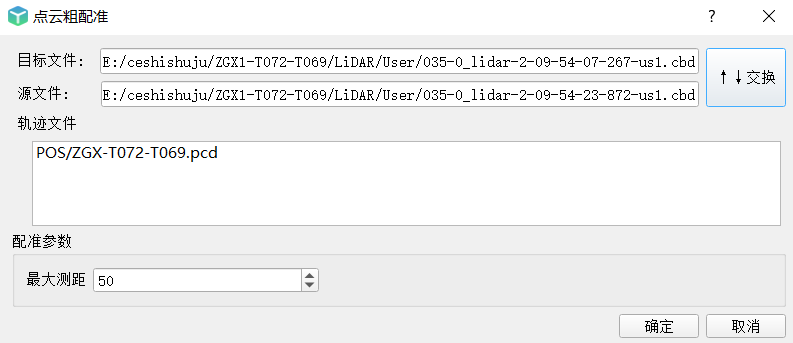
1. 完成參數設置后,點擊“確定”進行粗配準。
參數設置
交換:交換目標文件和源文件數據。
最大測距:(默認為50m)采樣時點云數據與軌跡數據之間的最大距離。
特別說明:移動LiDAR文件的配準需要軌跡文件
#### 精配準
**功能描述**:在粗配準的基礎上,對兩組點云數據進行精確配準。
**步驟**:
1. 在資源項目管理中選擇兩組具有一定重疊區域的點云數據,點擊按鈕,彈出點云精配準界面。
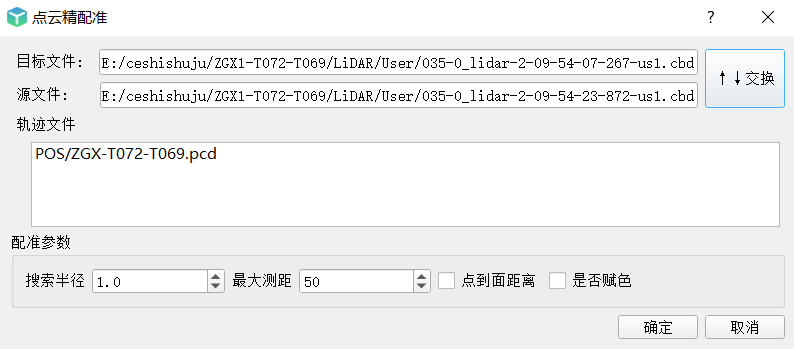
1. 完成參數設置后,點擊“確定”進行精配準。
參數設置
交換:交換目標文件和源文件數據。
搜索半徑:(默認為1.0m)根據中心點搜索相應最近點點集的距離。
最大測距:(默認為50m)采樣時點云數據與軌跡數據之間的最大距離。
點到面距離:根據點到平面距離原則進行配準。
是否賦色:該選項勾選后,點云配準用于對點云進行賦色,將目標文件的顏色賦予源文件。

賦色前
賦色后
特別說明:移動LiDAR文件的配準需要軌跡文件
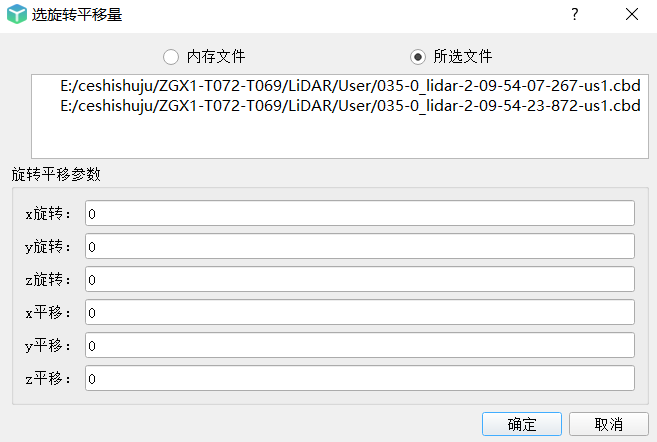
#### 旋轉平移
功能描述:在粗配準的基礎上,對兩組點云數據進行精確配準。
**步驟**:
1. 在資源項目管理中選擇兩組具有一定重疊區域的點云數據,點擊按鈕,彈出點云精配準界面。
1. 完成參數設置后,點擊“確定”進行精配準。
參數設置
x旋轉:繞x軸旋轉角度。
y旋轉:繞y軸旋轉角度。
z旋轉:繞z軸旋轉角度。
x平移:x方向平移量。
y平移:y方向平移量。
z平移:z方向平移量。
