
`src/runtime/chan.go:hchan`定義了channel的數據結構:
~~~
type hchan struct {
qcount uint // 當前隊列中剩余元素個數
dataqsiz uint // 環形隊列長度,即可以存放的元素個數
buf unsafe.Pointer // 環形隊列指針
elemsize uint16 // 每個元素的大小
closed uint32 // 標識關閉狀態
elemtype *_type // 元素類型
sendx uint // 隊列下標,指示元素寫入時存放到隊列中的位置
recvx uint // 隊列下標,指示元素從隊列的該位置讀出
recvq waitq // 等待讀消息的goroutine隊列
sendq waitq // 等待寫消息的goroutine隊列
lock mutex // 互斥鎖,chan不允許并發讀寫
}
~~~
### 環形隊列
chan內部實現了一個環形隊列作為其緩沖區,隊列的長度是創建chan時指定的。
下圖展示了一個可緩存6個元素的channel示意圖:
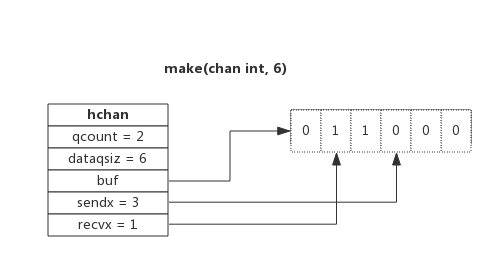
* dataqsiz指示了隊列長度為6,即可緩存6個元素;
* buf指向隊列的內存,隊列中還剩余兩個元素;
* qcount表示隊列中還有兩個元素;
* sendx指示后續寫入的數據存儲的位置,取值\[0, 6);
* recvx指示從該位置讀取數據, 取值\[0, 6);
### 等待隊列
從channel讀數據,如果channel緩沖區為空或者沒有緩沖區,當前goroutine會被阻塞。
向channel寫數據,如果channel緩沖區已滿或者沒有緩沖區,當前goroutine會被阻塞。
被阻塞的goroutine將會掛在channel的等待隊列中:
* 因讀阻塞的goroutine會被向channel寫入數據的goroutine喚醒;
* 因寫阻塞的goroutine會被從channel讀數據的goroutine喚醒;
下圖展示了一個沒有緩沖區的channel,有幾個goroutine阻塞等待讀數據:
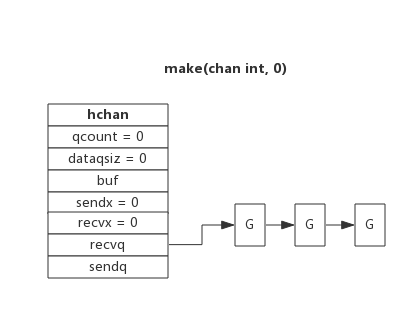
注意,一般情況下recvq和sendq至少有一個為空。只有一個例外,那就是同一個goroutine使用select語句向channel一邊寫數據,一邊讀數據
### channel寫數據
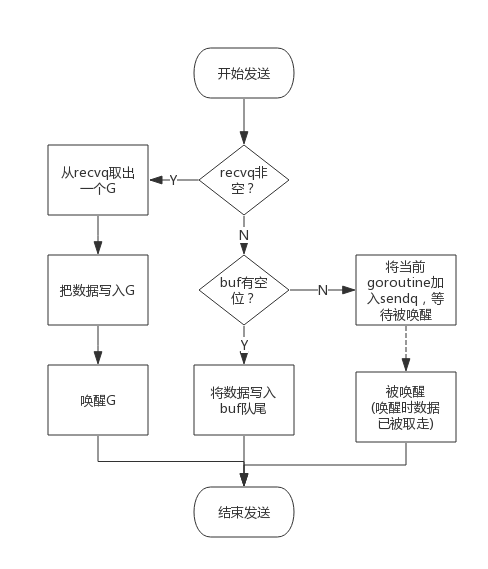
向一個channel中寫數據簡單過程如下:
1. 如果等待接收隊列recvq不為空,說明緩沖區中沒有數據或者沒有緩沖區,此時直接從recvq取出G,并把數據寫入,最后把該G喚醒,結束發送過程;
2. 如果緩沖區中有空余位置,將數據寫入緩沖區,結束發送過程;
3. 如果緩沖區中沒有空余位置,將待發送數據寫入G,將當前G加入sendq,進入睡眠,等待被讀goroutine喚醒;
簡單流程圖如下:
### channel讀數據
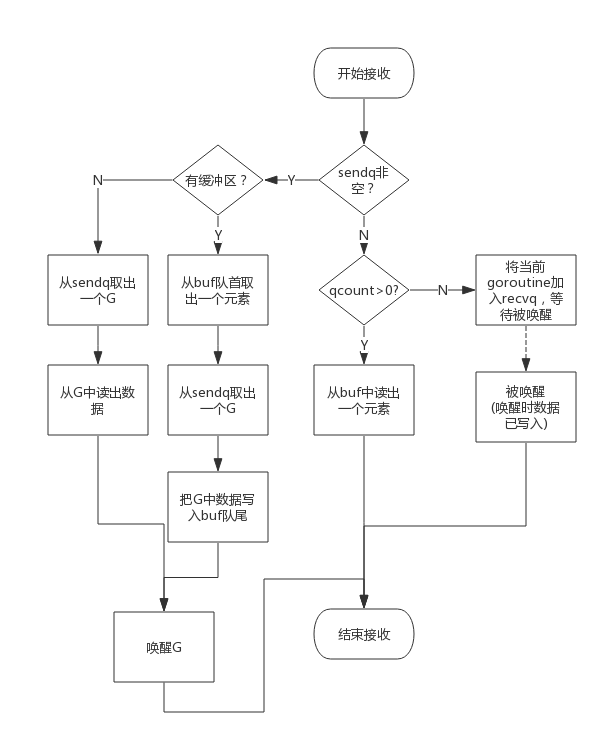
從一個channel讀數據簡單過程如下:
1. 如果等待發送隊列sendq不為空,且沒有緩沖區,直接從sendq中取出G,把G中數據讀出,最后把G喚醒,結束讀取過程;
2. 如果等待發送隊列sendq不為空,此時說明緩沖區已滿,從緩沖區中首部讀出數據,把G中數據寫入緩沖區尾部,把G喚醒,結束讀取過程;
3. 如果緩沖區中有數據,則從緩沖區取出數據,結束讀取過程;
4. 將當前goroutine加入recvq,進入睡眠,等待被寫goroutine喚醒;
簡單流程圖如下:
### 關閉channel
關閉channel時會把recvq中的G全部喚醒,本該寫入G的數據位置為nil。把sendq中的G全部喚醒,但這些G會panic。
除此之外,panic出現的常見場景還有:
1. 關閉值為nil的channel
2. 關閉已經被關閉的channel
3. 向已經關閉的channel寫數據
- 概述
- go語言基礎特性
- Go語言聲明
- Go項目構建及編譯
- go command
- 程序設計原則
- Go基礎
- 變量
- 常量
- iota
- 基本類型
- byte和rune類型
- 類型定義和類型別名
- 數組
- string
- 高效字符串連接
- string底層原理
- 運算符
- new
- make
- 指針
- 下劃線 & import
- 語法糖
- 簡短變量申明
- 流程控制
- ifelse
- switch
- select
- select實現原理
- select常見案例
- for
- range
- range實現原理
- 常見案例
- range陷阱
- Goto&Break&Continue
- Go函數
- 函數
- 可變參數函數
- 高階函數
- init函數和main函數
- 匿名函數
- 閉包
- 常用內置函數
- defer
- defer常見案例
- defer規則
- defer與函數返回值
- defer實現原理
- defer陷阱
- 數據結構
- slice
- slice內存布局
- slice&array
- slice底層實現
- slice陷阱
- map
- Map實現原理
- 集合
- List
- Set
- 線程安全數據結構
- sync.Map
- Concurrent Map
- 面向對象編程
- struct
- 匿名結構體&匿名字段
- 嵌套結構體
- 結構體的“繼承”
- struct tag
- 行為方法
- 方法與函數
- type Method Value & Method Expressions
- interface
- 類型斷言
- 多態
- 錯誤機制
- error
- 自定義錯誤
- panic&recover
- reflect
- reflect包
- 應用示例
- DeepEqual
- 反射-fillObjectField
- 反射-copyObject
- IO
- 讀取文件
- 寫文件
- bufio
- ioutil
- Go網絡編程
- tcp
- tcp粘包
- udp
- HTTP
- http服務
- httprouter
- webSocket
- go并發編程
- Goroutine
- thread vs goroutine
- Goroutine任務取消
- 通過channel廣播實現
- Context
- Goroutine調度機制
- goroutine調度器1.0
- GMP模型調度器
- 調度器竊取策略
- 調度器的生命周期
- 調度過程全解析
- channel
- 無緩沖的通道
- 緩沖信道
- 單向信道
- chan實現原理
- 共享內存并發機制
- mutex互斥鎖
- mutex
- mutex原理
- mutex模式
- RWLock
- 使用信道處理競態條件
- WaitGroup
- 工作池
- 并發任務
- once運行一次
- 僅需任意任務完成
- 所有任務完成
- 對象池
- 定時器Timer
- Timer
- Timer實現原理
- 周期性定時器Ticker
- Ticker對外接口
- ticker使用場景
- ticker實現原理
- ticker使用陷阱
- 包和依賴管理
- package
- 依賴管理
- 測試
- 單元測試
- 表格測試法
- Banchmark
- BDD
- 常用架構模式
- Pipe-filter pattern
- Micro Kernel
- JSON
- json-內置解析器
- easyjson
- 性能分析
- gc
- 工具類
- fmt
- Time
- builtin
- unsafe
- sync.pool
- atomic
- flag
- runtime
- strconv
- template