
> # map的底層
- 哈希表(hash table),又稱散列表,它通過建立鍵`key`與值`value`之間的映射,實現高效的元素查詢
- 查找元素,添加元素,刪除元素 O(n)時間
- `hmap` 是 `map` 結構的頭部,用于存儲 `map` 的元數據
- `bmap` 是實際存儲 `map` 鍵值對的結構。它表示一個存儲桶(bucket)
>### hmap
```
type hmap struct {
count int // 活躍的鍵值對數量 == map 的大小。必須是第一個字段(由 len() 內置函數使用)。
flags uint8 // 標志位,用于存儲與 map 狀態相關的標志信息。
B uint8 // 存儲桶的數量的對數(log_2),可以容納最多 loadFactor * 2^B 個元素。
noverflow uint16 // 近似的溢出存儲桶的數量;有關詳細信息,請參見 incrnoverflow。
hash0 uint32 // 哈希種子,用于哈希函數的初始值。
buckets unsafe.Pointer // 指向存儲桶數組的指針,數組大小為 2^B。如果 count == 0,則可能為 nil。
oldbuckets unsafe.Pointer // 指向先前存儲桶數組的指針,其大小為當前的一半,僅在增長時為非 nil。
nevacuate uintptr // 遷移進度計數器(小于此值的存儲桶已遷移到新的存儲桶數組)。
extra *mapextra // 可選字段,包含一些額外的字段。
}
```
* **count**:記錄 `map` 中當前存儲的鍵值對的數量(活躍單元數),也是 `len()` 內置函數的依據。
* **flags**: 存儲與 `map` 狀態相關的標志信息。例如,用于記錄 `map` 是否正在增長等狀態。
* **B**:表示存儲桶數量的對數(log\_2),存儲桶數量為 `2^B`。它決定了 `map` 可以存儲的最大鍵值對數量。
* **noverflow**: 記錄溢出存儲桶的數量(大致),在發生哈希沖突時,多個鍵值對可能會被分配到同一個存儲桶,因此可能會產生溢出存儲桶。
* **hash0**:哈希種子,用于哈希函數。通過引入種子,使得 `map` 的哈希分布更隨機,以減少沖突。
* **buckets**: 指向當前存儲桶數組的指針,數組的大小為 `2^B`。如果 `map` 為空(count == 0),該字段可能為 `nil`。
* **oldbuckets**: 在 `map` 進行擴容時,指向先前存儲桶數組的指針,舊數組的大小是新數組的一半。在擴容過程中,這個指針會被用來遷移舊的鍵值對。
* **nevacuate**: 在擴容過程中,記錄了遷移進度的計數器。小于此值的存儲桶已經被遷移到新的存儲桶數組。
* **extra**:可選字段,用于存儲一些額外的數據,比如保存小 `map` 結構體的溢出數據或指向垃圾回收器的指針。
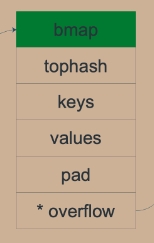
> bmap
```
type bmap struct {
// tophash 通常包含此存儲桶中每個鍵的哈希值的最高字節。
// 如果 tophash[0] < minTopHash,則 tophash[0] 是存儲桶搬遷狀態。
tophash [bucketCnt]uint8
// 接下來是 bucketCnt 個鍵和 bucketCnt 個元素。
// 注意:將所有鍵一起打包然后將所有元素一起打包使代碼稍微復雜一些,
// 比如交替存儲 key/elem/key/elem/...,但是這樣可以消除填充,
// 填充可能需要,例如 map[int64]int8。
// 緊跟在這些之后的是溢出指針。
}
```
> # key的定位
- key 根據當前初始話的hash種子進行哈希計算得到哈希值, hash后幾位確定桶的位置, 前幾位作為tophash
- 當兩個不同的 key 落在同一個桶中,也就是發生了哈希沖突。沖突的解決手段是用鏈表法:在 bucket 中,從前往后找到第一個空位。這樣,在查找某個 key 時,先找到對應的桶,再去遍歷 bucket 中的 key。如果在 bucket 中沒找到,并且 overflow 不為空,還要繼續去 overflow bucket 中尋找,直到找到或是所有的 key 槽位都找遍了,包括所有的 overflow bucket。
- 鏈式地址解決哈希沖突: 每個桶存儲一個鏈表包含所有沖突的元素
> # 擴容
- 擴容的時候不是馬上全部遷移, 而是會有標記狀態, 每次遷移一部分
> # 相關閱讀
- [go map底層實現](https://www.cnblogs.com/ybf-yyj/p/12763015.html)
- [go map深度解析](https://www.jianshu.com/p/0a777dc7f7ae)
- [golang map合并\_數據結構和算法(Golang實現)](https://blog.csdn.net/weixin_39688451/article/details/110236131)
- [Hello算法](https://www.hello-algo.com/chapter_hashing/hash_map)
- 草稿
- Golang
- 切片 slice
- 數組和切片的區別
- 左閉右開
- make([]int, 5) 和 make([]int, 0, 5) 區別
- 切片非線程安全,并發操作為啥不會像map一樣報錯
- []struct{} 如何遍歷
- 切片如何刪除某個元素
- append 一個nil 切片
- 哈希表 map
- 并發操作
- 并發寫報錯
- 并發讀不會報錯
- 并發讀有寫報錯
- 并發迭代有寫報錯
- 自制并發安全字典
- 官方并發安全字典
- 對未初始化的 map 進行賦值操作
- map的底層
- 無序輸出
- 等量擴容
- 實現集合
- map的key可以使哪些值
- 協程 go
- 協程相關閱讀
- 進程、線程、協程
- 協程 (捕獲異常 和 協程池)
- GPM 模型
- CSP模型
- channel
- channel 相關操作
- 交替打印
- 如何讓channel 只能接收/只能發送
- channel 常見報錯
- channel 死鎖
- nil channel 和 已關閉的 channel
- 使用 select 來多路復用 channel
- channel 的使用
- 接口和結構體
- 簡單使用
- 兩個結構體能否比較
- 工廠模式
- 概念
- 簡單工廠
- 方法工廠
- 堆和棧,值類型和引用類型,內存逃逸,垃圾回收
- 棧和堆
- 內存逃逸
- 值類型和引用類型
- 垃圾回收方式
- 性能優化分析工具 pprof
- golang 代碼片段
- 片段一 defer
- 片段二 channel
- Golang 相關
- Golang 相關閱讀
- Golang 1-10
- make 和 new 的區別
- 使用指針的場景
- Go語言的context包
- 位運算
- Copy 是淺拷貝還是深拷貝
- init 函數 和 sync.Once
- select 多路復用
- Golang 其它
- MongoDB
- 可比較類型 與 可轉json 類型
- Gorm
- 面向對象和面向過程
- go語言實現-面向對象
- go語言實現-面向過程
- 限流,熔斷,降級
- 了解
- 熔斷配置
- 熔斷例子
- 服務降級
- github.com/alibaba/sentinel-golang
- 互斥鎖 讀寫鎖 原子鎖
- 為什么需要鎖
- 互斥鎖
- 讀寫鎖
- 原子鎖
- 互斥鎖性能對比
- 原子鎖性能對比
- 互斥鎖 or 原子鎖?
- 條件鎖
- 計數器
- GoFrame
- GF1.16版本
- 修改使用的表
- 按天、周、月、年
- GoFrame 文檔
- 配置文件
- 生成腳本
- 排序算法
- 相關排序
- 冒泡排序
- 選擇排序
- 插入排序
- 快速排序
- 歸并排序
- 堆排序
- 數據庫
- 分布式怎么保證線程安全
- 數據庫實現方式
- 基于表記錄
- 樂觀鎖
- 悲觀鎖
- Redis實現方式
- Zookeeper實現方式
- Mysql 相關
- group_concat
- 索引優化
- 索引優化1
- 定期分析和優化索引
- 覆蓋索引
- 組合索引
- 聚簇索引和非聚簇索引
- 索引類型與方式、聚簇與非聚簇索引
- 事務特征和隔離級別
- 查詢優化
- mysql自增表插入數據時,Id不連續問題
- InnoDB引擎 和 MyISAM引擎區別
- 鎖
- 悲觀鎖和樂觀鎖
- 查詢,更新,插入語句
- 什么是死鎖
- 怎么處理死鎖
- MySQL 隔離級別
- 事務特征
- 隔離級別
- 廢棄3
- 索引
- 索引類型和方式、聚簇和非聚簇索引(上)
- 索引類型和方式、聚簇和非聚簇索引(下)
- 回表、覆蓋索引、最左前綴、聯合索引、索引下推、索引合并
- Mysql 優化
- 索引的原理
- 千萬級表修改表結構
- Redis
- 獲取隨機三條數據
- Redis 持久化方式
- 全量模式 RDB 冷備份(內存快照)
- 增量模式 AOF 熱備份(文件追加)
- 過期key的刪除策略、內存淘汰機制
- 數據結構
- 位圖
- 網絡
- 網絡相關
- 游戲同步方式:幀同步和狀態同步
- Websocket
- OSI模型
- TCP 與 UDP
- 三次握手四次揮手
- Http 狀態碼
- 1xx(信息性狀態碼)
- 101 服務端代碼
- 101 客戶端代碼
- 2xx(成功狀態碼)
- 3xx(重定向狀態碼)
- 302 服務端代碼
- 302 客戶端代碼
- 4xx(客戶端錯誤狀態碼)
- 5xx(服務器錯誤狀態碼)
- 如何排查接口問題
- 網絡請求和響應過程
- time_wait
- keep-alive
- http 和 rpc 的區別
- I/O多路復用 select和poll
- too many open file
- 其它技術
- git 相關操作
- 修改提交備注
- 多個提交合并成一個提交
- 回退版本
- 小程序和公眾號
- 消息模板
- 獲取code
- 靜默登錄
- 其它技術相關
- C盤空間不足
- 生成式人工智能AIGC
- 共享文件
- 接口文檔, mock提供測試數據
- 抓包工具
- Python
- 安裝包失敗
- 自動化測試 Scrapy
- AIGC:人工智能生成內容
- PHP
- xhprof 性能分析
- 一鍵安裝
- 哈希沖突的解決方式
- 鏈地址法(拉鏈法)
- 開放地址法
- 再哈希
- 概念1
- Nginx
- 負載均衡方式
- 加密解密
- 簡單了解
- 簽名算法例子
- 碼例子1
- 代碼例子2
- Linux
- netstat (用于查看和管理網絡連接和路由表)
- ps 用于查看和管理進程
- ab 壓測
- nohup 守護進程
- lsof (List Open File 獲取被進程打開文件的信息)
- tail 查看日志
- 各類linux同步機制
- Socket 服務端的實現,select 和epoll的區別?
- scp 傳輸,awk 是一個強大的文本分析工具
- pidof
- 項目
- 棋牌
- 牌的編碼
- 出牌規則
- 洗牌
- 股票
- 股票知識
- 龍虎榜數據緩存方式
- 單日龍虎榜數據
- 單只股票的歷史上榜
- 遇到的問題
- 浮點數精度問題
- Mysql Sum 精度問題(float, double精度問題)
- 分頁問題(數據重復)
- 工具包
- v3
- common.go
- common_test.go
- customized.go
- customized_test.go
- slice.go
- slice_test.go
- time.go
- time_test.go
- v4
- common.go
- common_test.go
- customized.go
- customized_test.go
- slice.go
- time.go
- time_test.go
- 相關閱讀
- 協程 goroutine
- 通道 channel
- json 和 gob 序列化和反序列化
- redis 有序集合
- mysql22
- 相關閱讀 s
- pyTorch
- defer
- 內存泄漏
- 數據傳輸
- 雜項
- 一提
- gogogoo
- 內容