# 機器人軟件設計
## 檢測識別
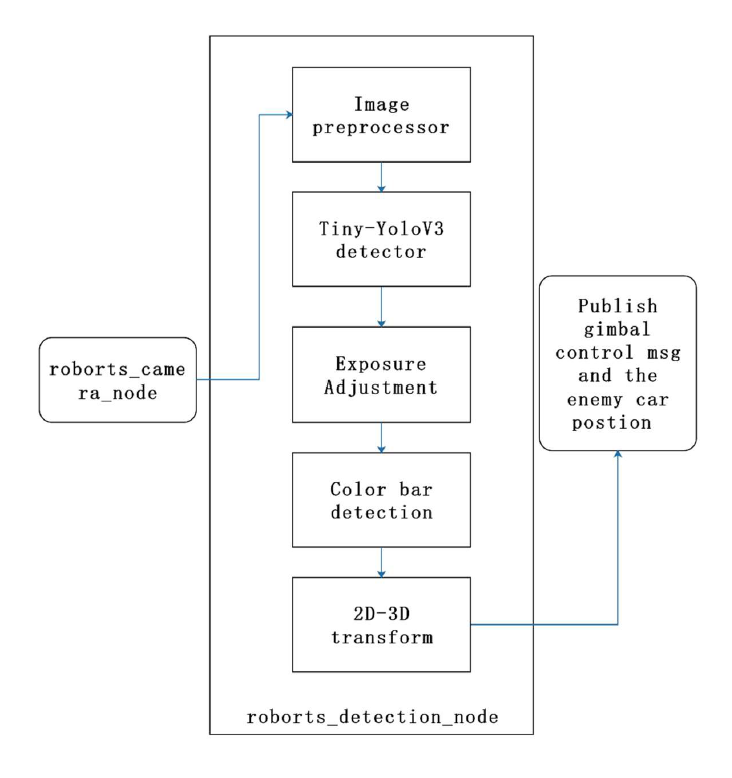
目標檢測部分在整個系統中起著重要的作用。如圖6所示,檢測節點訂閱攝像機消息(原始圖像和攝像機信息)。當接收到新的攝像機幀時,圖像預處理器將進行一系列的預處理(包括歷史均衡和顏色抖動)。Tiny-YoloV3探測器能夠以25 FPs的速度找到場景中的所有車輛,并且對色光或“遠車”(即敵車與我們有一定距離)敏感。在探測到所有車輛后,我們需要找到裝甲的位置。我們希望在RoboRTS中使用原始的檢測算法,但在此之前必須進行曝光調整。在確定敵方裝甲兵位置時,需要將裝甲兵的二維中心像素位置轉換為三維世界位置,并用框架控制信息發布。
Tiny-Yolov3是Yolov3的輕量級版本,具有24個網絡層(包括卷積層、最大池層和yolo層)。我們按照darknet教程訓練我們的定制訓練數據集。輸入大小為416×416,使用SGD優化器,初始學習率為0.001,動量為0.9。檢測結果與傳統的roboRTS檢測算法相比,我們的檢測系統獲得了更為魯棒的檢測結果。因為我們減少了對汽車的檢測指標,消除了環境光照的影響。其次,我們可以偵測到一輛與我們有一定距離的敵車,即使沒有發現裝甲,也可以將它的位置發布到決策節點!它將允許決策節點實時跟蹤敵方車輛。

圖6 . 自主識別框架圖
