# 機器人軟件設計
## 智能決策
:-: 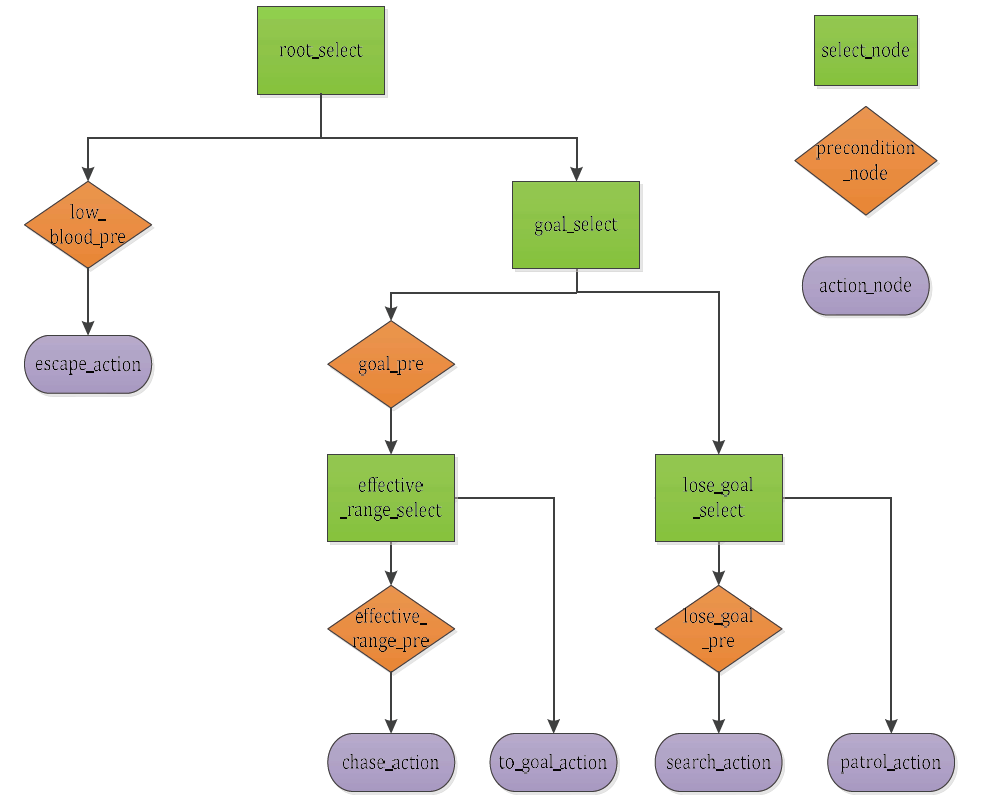
1. 我們使用的智能決策系統是行為數,它是從根開始(父節點就像選擇器一樣),每個子節點從左到右進行評估。子節點根據其優先級進行排序。如果滿足所有子節點的條件,則會啟動其行為。當節點啟動某個行為時,該節點將設置為“running”,并返回該行為。下次對樹進行評估時,它會再次檢查優先級最高的節點,然后當它到達“running”的節點時,它會知道它從中斷的位置。在到達結束狀態之前,節點可以具有一系列動作和條件。如果任何條件失敗,遍歷將返回到父級。然后父選擇器移動到下一個優先級子項。行為樹相較于決策樹更復雜,可以控制行為,而決策樹只能用于決策。
在程序中,我們使用Black Board來分享機器人的狀態數據,例如裁判系統狀態、機器人狀態和自身位置狀態、地方信息狀態等,獲取感知信息作為決策層的輸入。在行為樹中,機器人通過判斷先決條件。我們在行為樹中使用三種類型的節點:選擇節點、前置條件節點和操作節點。
1.當我們機器人有彈丸時,進入巡邏節點,在場地上尋找對方機器人。
3. 當我們機器人沒有彈丸時,進入逃跑節點,并在場地尋找加成區域。
5. 當目標的前提節點滿足時,進入丟失的目標選擇節點。當目標的前提條件節點滿足時,進入追逐動作節點,否則進入目標動作節點。
7. 在出現懲罰區時,直接將坐標發送到路徑規劃模板,在機器人執行過程中繞過相應的區域。
9.在特定范圍內射擊時,在追逐動作中會設計腰部扭動功能。在逃逸行動中,通過改變探測敵方的條件來檢測裝甲板的損傷位置,從而確定敵方的位置,從而更有效地規劃逃生路徑。
