
在前面課時中,我們學習了分治法的思想,并以二分查找為例介紹了分治的實現邏輯。
我們提到過,分治法的使用必須滿足 4 個條件:
1. 問題的解決難度與數據規模有關;
2. 原問題可被分解;
3. 子問題的解可以合并為原問題的解;
4. 所有的子問題相互獨立。
然而在實際工作中還存在這樣一類問題,它們滿足前 3 個條件,唯獨不滿足第 4 個條件。那么這類問題我們該怎么解決呢?本課時,我們就來學習求解這類問題的動態規劃算法,它是最常用的算法之一。
#### 什么是動態規劃
從數學的視角來看,動態規劃是一種運籌學方法,是在多輪決策過程中的最優方法。
那么,什么是多輪決策呢?其實多輪決策的每一輪都可以看作是一個子問題。從分治法的視角來看,每個子問題必須相互獨立。但在多輪決策中,這個假設顯然不成立。這也是動態規劃方法產生的原因之一。
動態規劃是候選人參加面試的噩夢,也是面試過程中的難點。雖然動態規劃很難,但在實際的工作中,使用頻率并不高,不是所有的崗位都會用到動態規劃。
* [ ] 最短路徑問題
接下來。我們來看一個非常典型的例子,最短路徑問題。如下圖所示:
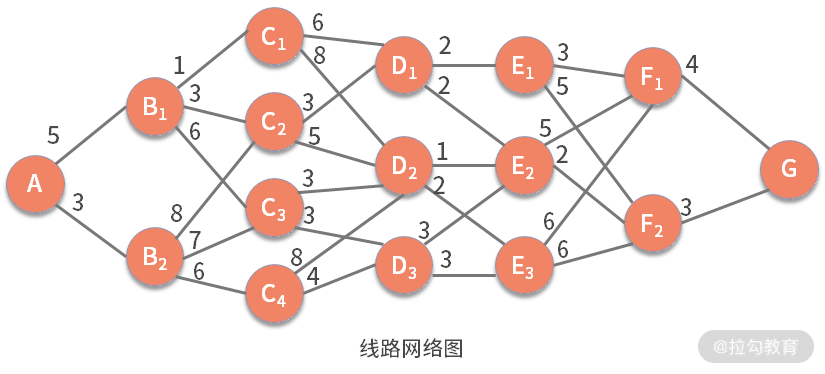
每個結點是一個位置,每條邊是兩個位置之間的距離。現在需要求解出一條由 A 到 G 的最短距離是多少。
不難發現,我們需要求解的路線是由 A 到 G,這就意味著 A 要先到 B,再到 C,再到 D,再到 E,再到 F。每一輪都需要做不同的決策,而每次的決策又依賴上一輪決策的結果。
例如,做 D2 -> E 的決策時,D2 -> E2 的距離為 1,最短。但這輪的決策,基于的假設是從 D2 出發,這就意味著前面一輪的決策結果是 D2。由此可見,相鄰兩輪的決策結果并不是獨立的。
動態規劃還有一個重要概念叫作狀態。在這個例子中,狀態是個變量,而且受決策動作的影響。例如,第一輪決策的狀態是 S1,可選的值是 A,第二輪決策的狀態是 S2,可選的值就是 B1 和 B2。以此類推。
#### 動態規劃的基本方法
動態規劃問題之所以難,是因為動態規劃的解題方法并沒有那么標準化,它需要你因題而異,仔細分析問題并尋找解決方案。雖然動態規劃問題沒有標準化的解題方法,但它有一些宏觀層面通用的方法論:
下面的 k 表示多輪決策的第 k 輪
1. 分階段,將原問題劃分成幾個子問題。一個子問題就是多輪決策的一個階段,它們可以是不滿足獨立性的。
2. 找狀態,選擇合適的狀態變量 Sk。它需要具備描述多輪決策過程的演變,更像是決策可能的結果。
3. 做決策,確定決策變量 uk。每一輪的決策就是每一輪可能的決策動作,例如 D2 的可能的決策動作是 D2 -> E2 和 D2 -> E3。
4. 狀態轉移方程。這個步驟是動態規劃最重要的核心,即 sk+1= uk(sk)?。
5. 定目標。寫出代表多輪決策目標的指標函數 Vk,n。
6. 尋找終止條件。
了解了方法論、狀態、多輪決策之后,我們再補充一些動態規劃的基本概念。
* 策略,每輪的動作是決策,多輪決策合在一起常常被稱為策略。
* 策略集合,由于每輪的決策動作都是一個變量,這就導致合在一起的策略也是一個變量。我們通常會稱所有可能的策略為策略集合。因此,動態規劃的目標,也可以說是從策略集合中,找到最優的那個策略。
一般而言,具有如下幾個特征的問題,可以采用動態規劃求解:
1. 最優子結構。它的含義是,原問題的最優解所包括的子問題的解也是最優的。例如,某個策略使得 A 到 G 是最優的。假設它途徑了 Fi,那么它從 A 到 Fi 也一定是最優的。
2. 無后效性。某階段的決策,無法影響先前的狀態。可以理解為今天的動作改變不了歷史。
3. 有重疊子問題。也就是,子問題之間不獨立。這個性質是動態規劃區別于分治法的條件。如果原問題不滿足這個特征,也是可以用動態規劃求解的,無非就是殺雞用了宰牛刀。
#### 動態規劃的案例
到這里,動態規劃的概念和方法就講完了。接下來,我們以最短路徑問題再來看看動態規劃的求解方法。在這個問題中,你可以采用最暴力的方法,那就是把所有的可能路徑都遍歷一遍,去看哪個結果的路徑最短的。如果采用動態規劃方法,那么我們按照方法論來執行。
* [ ] 動態規劃的求解方法
具體的解題步驟如下:
1. 分階段
很顯然,從 A 到 G,可以拆分為 A -> B、B -> C、C -> D、D -> E、E -> F、F -> G,6 個階段。
2. 找狀態
第一輪的狀態 S1 = A,第二輪 S2 = {B1,B2},第三輪 S3 = {C1,C2,C3,C4},第四輪 S4 = {D1,D2,D3},第五輪 S5 = {E1,E2,E3},第六輪 S6 = {F1,F2},第七輪 S7 = {G}。
3. 做決策
決策變量就是上面圖中的每條邊。我們以第四輪決策 D -> E 為例來看,可以得到 u4(D1),u4(D2),u4(D3)。其中 u4(D1) 的可能結果是 E1 和 E2。
4. 寫出狀態轉移方程
在這里,就是 sk+1 = uk(sk)。
5. 定目標
別忘了,我們的目標是總距離最短。我們定義 dk(sk,uk) 是在 sk 時,選擇 uk 動作的距離。例如,d5(E1,F1) = 3。那么此時 n = 7,則有,
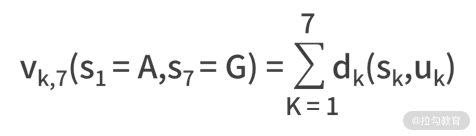
就是最終要優化的目標。
6. 尋找終止條件
* 很顯然,這里的起止條件分別是,s1 = A 和 s7 = G。
* 接下來,我們把所有的已知條件,凝練為上面的符號之后,只需要借助最優子結構,就可以把問題解決了。最優子結構的含義是,原問題的最優解所包括的子問題的解也是最優的。
* 套用在這個例子的含義就是,如果 A -> ... -> F1 -> G 是全局 A 到 G 最優的路徑,那么此處 A -> ... -> F1 也是 A 到 F1 的最優路徑。
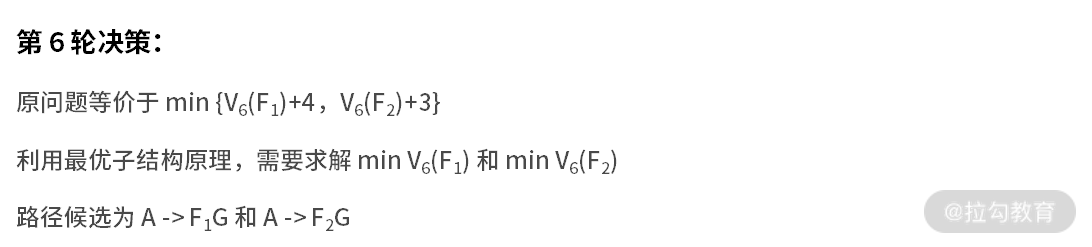
* 因此,此時的優化目標 min Vk,7(s1=A, s7=G),等價于 min { Vk,6(s1=A, s6=F1)+4, Vk,6(s1=A, s6=F2)+3 }。
* 此時,優化目標的含義為,從 A 到 G 的最短路徑,是 A 到 F1 到 G 的路徑和 A 到 F2 到 G 的路徑中更短的那個。
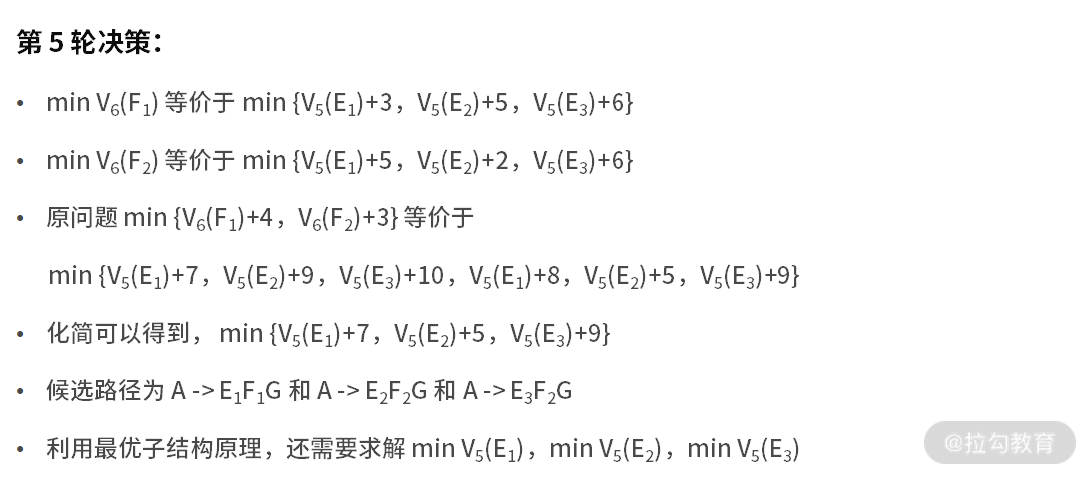
* 同樣的,對于上面式子中,Vk,6(s1=A,s6=F1) 和 Vk,6(s1=A,s6=F2),仍然可以遞歸地使用上面的分析方法。
* [ ] 計算過程詳解
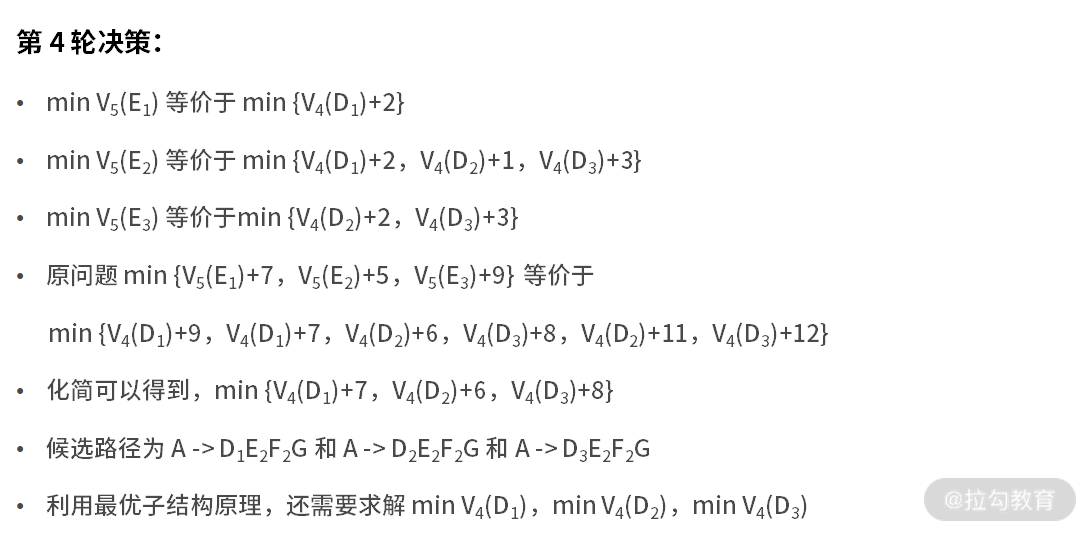
好了,為了讓大家清晰地看到結果,我們給出詳細的計算過程。為了書寫簡單,我們把函數 Vk,7(s1=A, s7=G) 精簡為 V7(G),含義為經過了 6 輪決策后,狀態到達 G 后所使用的距離。我們把圖片復制到這里一份,方便大家不用上下切換。

我們的優化目標為 min Vk,7(s1=A, s7=G),因此精簡后原問題為,min V7(G)。
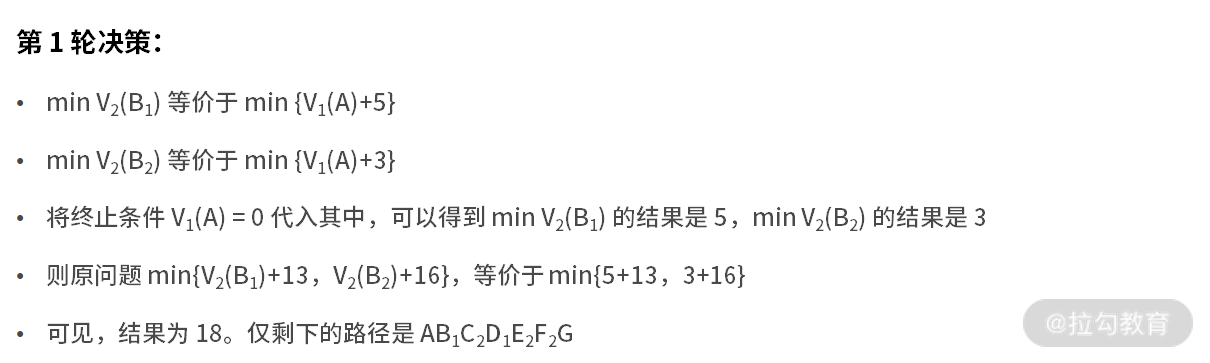
因此,最終輸出路徑為 A -> B1 -> C2 -> D1 -> E2 -> F2 -> G,最短距離為 18。
* [ ] 代碼實現過程
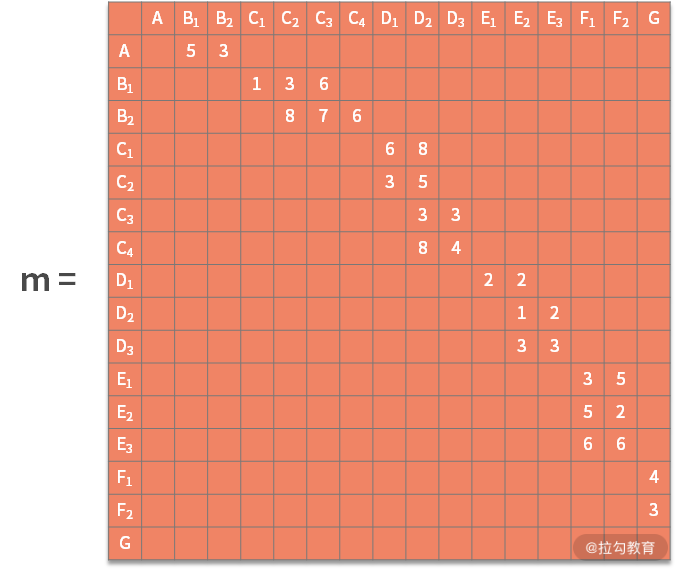
接下來,我們嘗試用代碼來實現上面的計算過程。對于輸入的圖,可以采用一個 m x m 的二維數組來保存。在這個二維數組里,m 等于全部的結點數,也就是結點與結點的關系圖。而數組每個元素的數值,定義為結點到結點需要的距離。

在本例中,可以定義輸入矩陣 m(空白處為0),如下圖所示:
代碼如下:
```
public class testpath {
public static int minPath1(int[][] matrix) {
return process1(matrix, matrix[0].length-1);
}
// 遞歸
public static int process1(int[][] matrix, int i) {
// 到達A退出遞歸
if (i == 0) {
return 0;
}
// 狀態轉移
else{
int distance = 999;
for(int j=0; j<i; j++){
if(matrix[j][i]!=0){
int d_tmp = matrix[j][i] + process1(matrix, j);
if (d_tmp < distance){
distance = d_tmp;
}
}
}
return distance;
}
}
public static void main(String[] args) {
int[][] m = {{0,5,3,0,0,0,0,0,0,0,0,0,0,0,0,0},{0,0,0,1,3,6,0,0,0,0,0,0,0,0,0,0},{0,0,0,0,8,7,6,0,0,0,0,0,0,0,0,0},{0,0,0,0,0,0,0,6,8,0,0,0,0,0,0,0},{0,0,0,0,0,0,0,3,5,0,0,0,0,0,0,0},{0,0,0,0,0,0,0,0,3,3,0,0,0,0,0,0},{0,0,0,0,0,0,0,0,8,4,0,0,0,0,0,0},{0,0,0,0,0,0,0,0,0,0,2,2,0,0,0,0},{0,0,0,0,0,0,0,0,0,0,0,1,2,0,0,0},{0,0,0,0,0,0,0,0,0,0,0,3,3,0,0,0},{0,0,0,0,0,0,0,0,0,0,0,0,0,3,5,0},{0,0,0,0,0,0,0,0,0,0,0,0,0,5,2,0},{0,0,0,0,0,0,0,0,0,0,0,0,0,6,6,0},{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,4},{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,3}};
System.out.println(minPath1(m));
}
}
```
* [ ] 代碼解讀
下面我們對這段代碼進行解讀:
代碼的 27 行是主函數,在代碼中定義了二維數組 m,對應于輸入的距離圖。m 是 15 x 16 維的,我們忽略了最后一行的全 0(即使輸入也不會影響結果)。
然后調用函數 minPath1。在第 2 到第 4 行,它的內部又調用了 process1(matrix, matrix[0].length-1)。在這里,matrix[0].length-1 的值是 15,表示的含義是 matrix 數組的第 16 列(G)是目的地。
接著進入 process1 函數中。我們知道在動態規劃的過程中,是從后往前不斷地推進結果,這就是狀態轉移的過程。對應代碼中的 13-24 行:
* 第 15 行開始循環,j 變量是縱向的循環變量。
* 第 16 行判斷 matrix[j][i] 與 0 的關系,含義為,只有值不為 0 才說明兩個結點之間存在通路。
* 一旦發現某個通路,就需要計算其距離。計算的方式是 17 行的,d_tmp = matrix[j][i] + process1(matrix, j)。
* 當得到了距離之后,還需要找到最短的那個距離,也就是 18 到 20 行的含義。這就是動態規劃最優子結構的體現。
* 一旦 i 減小到了 0,就說明已經到了起點 A。那么 A 到 A 的距離就是 0,直接第 10 行的 return 0 就可以了。
* 經過運行,這段代碼的輸出結果是 18,這與我們手動的推導結果一致。
#### 練習題
在 08 課時中,我們講述“字符串匹配算法的案例”時提到過,最大公共子串也可以使用動態規劃的方法來做。
案例題目如下:
假設有且僅有 1 個最大公共子串。比如,輸入 a =?"13452439", b =?"123456"。由于字符串?"345"?同時在 a 和 b 中出現,且是同時出現在 a 和 b 中的最長子串。因此輸出?"345"。
我們就把這個問題當作本課時的練習題。答案會在后面的實戰章節中公布。
#### 總結
動態規劃領域有很多經典問題,本課時,我們講述了最短路徑的問題。需要明確的是,動態規劃并不簡單,動態規劃的適用范圍也沒有那么廣。如果你不是專門從事運籌優化領域的工作,對它不了解也很正常。如果在求職過程中,你求職的崗位與運籌優化關系不大,一般而言被考察到動態規劃的可能性也是極低的。
- 前言
- 開篇詞
- 數據結構與算法,應該這樣學!
- 模塊一:代碼效率優化方法論
- 01復雜度:如何衡量程序運行的效率?
- 02 數據結構:將“昂貴”的時間復雜度轉換成“廉價”的空間復雜度
- 模塊二:數據結構基礎
- 03 增刪查:掌握數據處理的基本操作,以不變應萬變
- 04 如何完成線性表結構下的增刪查?
- 05 棧:后進先出的線性表,如何實現增刪查?
- 06 隊列:先進先出的線性表,如何實現增刪查?
- 07 數組:如何實現基于索引的查找?
- 08 字符串:如何正確回答面試中高頻考察的字符串匹配算法?
- 09 樹和二叉樹:分支關系與層次結構下,如何有效實現增刪查?
- 10 哈希表:如何利用好高效率查找的“利器”?
- 模塊三:算法思維基礎
- 11 遞歸:如何利用遞歸求解漢諾塔問題?
- 12 分治:如何利用分治法完成數據查找?
- 13 排序:經典排序算法原理解析與優劣對比
- 14 動態規劃:如何通過最優子結構,完成復雜問題求解?
- 模塊四:面試真題 = 實踐問題的“縮影”
- 15 定位問題才能更好地解決問題:開發前的復雜度分析與技術選型
- 16 真題案例(一):算法思維訓練
- 17真題案例(二):數據結構訓練
- 18 真題案例(三):力扣真題訓練
- 19 真題案例(四):大廠真題實戰演練
- 特別放送:面試現場
- 20 代碼之外,技術面試中你應該具備哪些軟素質?
- 21 面試中如何建立全局觀,快速完成優質的手寫代碼?
- 結束語
- 結束語 勤修內功,構建你的核心競爭力