# 十、獸群、鳥群和交通堵塞
> 原文:[Chapter 10 Herds, Flocks, and Traffic Jams](http://greenteapress.com/complexity2/html/thinkcomplexity2011.html)
> 譯者:[飛龍](https://github.com/wizardforcel)
> 協議:[CC BY-NC-SA 4.0](http://creativecommons.org/licenses/by-nc-sa/4.0/)
> 自豪地采用[谷歌翻譯](https://translate.google.cn/)
本章的代碼位于`chap10.ipynb`中,它是本書倉庫中的 Jupyter 筆記本。使用此代碼的更多信息,請參見第?節。
## 10.1 交通堵塞
是什么導致交通堵塞?在某些情況下,有明顯的原因,如事故,車速監視或其他干擾交通的事情。 但其他時候,交通堵塞似乎沒有明顯的原因。
基于智能體的模型有助于解釋自發性交通擁堵。 例如,我根據 Resnick,海龜,白蟻和交通堵塞模型實現了一個簡單的高速路模擬。
這是代表“高速路”的類:
```py
class Highway:
def __init__(self, n=10, length=1000, eps=0):
self.length = length
self.eps = eps
# create the drivers
locs = np.linspace(0, length, n, endpoint=False)
self.drivers = [Driver(loc) for loc in locs]
# and link them up
for i in range(n):
j = (i+1) % n
self.drivers[i].next = self.drivers[j]
```
`n`是汽車的數量。
`length`是高速路的長度,默認為 1000(以任意單位)。
`eps`是我們將添加到系統中的隨機噪聲。
`loc`包含駕駛員的位置;最初它們沿著高速公路等距分布。
駕駛員由`Driver`對象表示。 每個駕駛員都包含前方駕駛員的引用。 高速公路是圓形的,所以最后的駕駛員可以引用第一個。
`step`方法簡單;它只是移動每個駕駛員:
```py
def step(self):
for driver in self.drivers:
self.move(driver)
```
這里是`move `方法:
```py
def move(self, driver):
d = self.distance(driver)
# let the driver choose acceleration
acc = driver.choose_acceleration(d)
acc = min(acc, self.max_acc)
acc = max(acc, self.min_acc)
speed = driver.speed + acc
# add random noise to speed
speed *= np.random.uniform(1-self.eps, 1+self.eps)
# keep it nonnegative and under the speed limit
speed = max(speed, 0)
speed = min(speed, self.speed_limit)
# if current speed would collide, stop
if speed > d:
speed = 0
# update speed and loc
driver.speed = speed
driver.loc += speed
```
`d`是駕駛員與前方駕駛員之間的距離。 這個距離被傳遞給`choose_acceleration`,它規定了駕駛員的行為。 這是司機做出的唯一決定; 其他一切都由模擬的“物理”決定。
+ `acc`是加速度,它受`min_acc`和`max_acc`限制。 在我的實現中,汽車可以在`max_acc = 1`時加速,在`min_acc = -10`時加速。
+ `speed`是舊的速度加上請求的加速度,但是我們做了一些調整。 首先,我們向速度添加了隨機噪音,因為這個世界并不完美。 `eps`決定了噪音的幅度,這是適用于速度的百分比; 例如,如果`eps`為 0.02,則速度乘以 98% 到 102% 之間的隨機數。
+ 然后速度限制在 0 到`speed_limit`之間,在我的實現中為 40,所以汽車不允許后退或加速。
+ 如果請求的速度會引起與下一輛車的碰撞,則速度設置為 0。
+ 最后,我們更新駕駛員的速度和`loc`屬性。
以下是`Driver`類的定義:
```py
class Driver:
def __init__(self, loc, speed=0):
self.loc = loc
self.speed = speed
def choose_acceleration(self, d):
return 1
```
`loc`和`speed `屬性是駕駛員的位置和速度。
`choose_acceleration`的這個實現非常簡單:它總是以最大速率加速。
由于汽車起步距離相等,因此我們預計它們都會加速,直到達到限速,或者直到它們的速度超過它們之間的距離。 此時,至少會發生一次“碰撞”,導致一些汽車停下來。
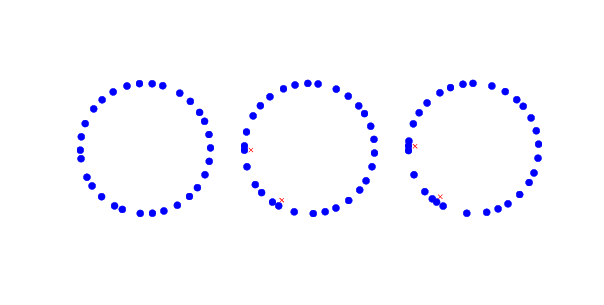
圖 10.1:三個時間點中,環形公路上的駕駛員的模擬。 點表示駕駛員的位置;十字表示駕駛員必須剎車來避開另一個駕駛員。
圖?展示了該過程中的幾個步驟,從 30 輛汽車和`eps = 0.02`開始。 左邊是 16 個時間步后的狀態,汽車排列成一圈。 由于隨機噪音,有些汽車比其他汽車要快,并且間距變得不均勻。
在下一個時間步驟(中),兩輛車相撞,用`x`標記表示。
在下一個時間步驟(右),兩輛汽車會與已停車的汽車碰撞,我們可以看到最初形成的交通堵塞。 一旦堵塞形成,它就會持續下去,其它汽車從后面靠近并碰撞,而前面的汽車加速離開。
在某些情況下,堵塞本身會向后傳播,如果你觀看本章的筆記本中的動畫,你可以看到它。
## 10.2 隨機噪聲
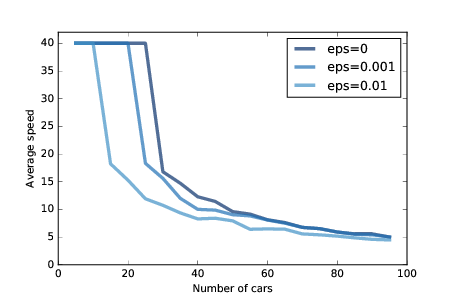
圖 10.2:平均速度和汽車數量的函數,帶有三個大小的附加隨機噪聲
隨著汽車數量的增加,交通堵塞變得更加嚴重。 圖?顯示了汽車能夠達到的平均速度,相對于汽車數量的函數。
最上面那行顯示`eps = 0`的結果;也就是說,速度沒有隨機變化。 如果汽車數量少于 25 輛,則汽車之間的間隔大于 40,這樣汽車可以達到并保持 40 的最大速度。超過 25 輛汽車形成交通堵塞,平均速度迅速下降。
這種效果是仿真物理學的直接結果,所以它不應該令人驚訝。 如果道路的長度為 1000,則`n`個車輛之間的間距為`1000 / n`。 而且由于汽車的行駛速度不超過前面的空間,所以我們預計,最高平均車速為`1000 / n`或 40,取最小者。
但這是最好的情況。只有少量的隨機性,情況會變得更糟。
圖?也顯示了`eps = 0.001`和`eps = 0.01`的結果,其對應于 0.1% 和 1% 的速度誤差。
即使有少量噪音,高速路的容量也會從 25 降至 20(“容量”是指可以達到并保持速度限制的最大車輛數量。 如果有 1% 的誤差,容量會下降到 10。
作為本章結尾的練習之一,你將有機會設計出更好的駕駛員; 也就是說,你將在`choose_acceleration`中嘗試不同的策略,并查看你是否可以找到可提高平均速度的駕駛行為。
## 10.3 Boids
1987 年,Craig Reynolds 發表了《獸群,鳥群和魚群:分布式行為模型》(Flocks, herds and schools: A distributed behavioral model),描述了一個基于智能體的獸群行為模型。 你可以從 <http://www.red3d.com/cwr/papers/1987/boids.html> 下載他的論文。
這種模型中的智能體被稱為“boids”,既是“bird-oid”的縮寫,又是“bird”的口音發音(雖然 boids 也用于模擬魚類和集中的陸生動物)。
每個智能體模擬了三種行為:
避免碰撞:
避開障礙物,包括其他鳥類。
鳥群集中:
移向鳥群的中心。
速度匹配:
將速度(速率和方向)與鄰近的鳥類對齊。
Boid 只根據局部信息做出決定;每個 boid 只能看到(或注意)其視野范圍內的其他 boid。
在本書的倉庫中,你會發現`Boids7.py`,它包含我的 boids 實現,部分基于《Flake, The Computational Beauty of Nature》(雪花:自然的計算之美)中的描述。
該程序定義了兩個類:`Boid`,實現了 boid 算法,和`World`,包含`Boid`列表和吸引`Boid`的“胡蘿卜”列表。
boid 算法使用`get_neighbors`在視野中查找其他 boid:
```py
def get_neighbors(self, others, radius, angle):
boids = []
for other in others:
if other is self:
continue
offset = other.pos - self.pos
# if not in range, skip it
if offset.mag > radius:
continue
# if not within viewing angle, skip it
if self.vel.diff_angle(offset) > angle:
continue
# otherwise add it to the list
boids.append(other)
return boids
```
`get_neighbors`使用向量減法來計算從`self`到`other`的向量。 這個向量的們是到另一個 boid 的距離。 `diff_angle`計算`self`的速度(也是視線)與另一個 boid 之間的角度。
`center`尋找視野中 boid 的質心,并返回一個指向它的向量:
```py
def center(self, others):
close = self.get_neighbors(others, r_center, a_center)
t = [other.pos for other in close]
if t:
center = sum(t)/len(t)
toward = vector(center - self.pos)
return limit_vector(toward)
else:
return null_vector
```
同樣,`avoid`尋找范圍內任何障礙物的質心,并返回一個指向它的向量,`copy`將返回當前朝向和鄰居的平均朝向之間的差,`love `計算出胡蘿卜的朝向。
`set_goal`計算這些目標的加權總和并設定總體目標:
```py
def set_goal(self, boids, carrot):
self.goal = (w_avoid * self.avoid(boids, carrot) +
w_center * self.center(boids) +
w_copy * self.copy(boids) +
w_love * self.love(carrot))
```
最后`move`更新 boid 的速度,位置和姿勢。
```py
def move(self, mu=0.1):
self.vel = (1-mu) * self.vel + mu * self.goal
self.vel.mag = 1
self.pos += dt * self.vel
self.axis = b_length * self.vel.norm()
```
新速度是舊速度和目標的加權和。 參數`mu`決定鳥類能夠多快地改變速度和方向。 時間步長`dt`決定了 boids 移動的距離。
許多參數影響鳥群行為,包括每個行為的范圍,角度和權重以及可操作性`mu`。
這些參數決定了 boids 形成和維持鳥群的能力,以及鳥群中運動和組織的模式。 對于某些設置,boids 類似于一群鳥;其他設置類似于魚群或一片飛蟲。
## 10.4 涌現和自由意志
作為一個整體,許多復雜的系統具有它們的組件不具有的屬性:
+ 細胞自動機規則 30 是確定性的,控制其演化的規則是完全已知的。 盡管如此,它會生成一個序列,統計上與隨機無法區分。
+ 謝林模型中的智能體不是種族主義者,但他們互動的結果就好像他們是。
+ 糖域中的智能體形成對角移動的波浪,盡管智能體不能。
+ 即使汽車正在向前行駛,交通堵塞會向后移動。
+ 獸群和鳥群的行為來自其成員之間的局部互動。
這些例子提出了一個途徑,用于解決幾個古老而富有挑戰性的問題,包括意識和自由意志的問題。
自由意志是做出選擇的能力,但是如果我們的身體和大腦受到確定性物理規律的支配,我們的選擇就會是確定的。 自由意志的爭論無數;我只會提到兩個:
+ 威廉·詹姆斯(William James)提出了一個兩階段模型,其中可能的行為由隨機過程產生,然后由確定性過程選擇。 在這種情況下,我們的行為基本上是不可預測的,因為生成它們的過程包含隨機元素。
+ 大衛休謨(David Hume)認為,我們對于做出選擇的感知是一種幻覺;在這種情況下,我們的行為是確定性的,因為產生它們的系統是確定性的。
這些論點以相反的方式調解沖突,但他們同意沖突是存在的:如果這些部分是確定性的,那么系統就不會有自由意志。
本書中的復雜系統提出了另一種選擇,在選擇和決策層面的自由意志,相當于神經元層面的(或更低層次)的決定論。 就像汽車向前行駛時,交通堵塞后退的方式一樣,即使神經元沒有,人也可以有自由意志。
## 10.5 練習
練習 1
在交通堵塞的模擬中,定義一個類,`BetterDriver`,它繼承`Driver`并覆蓋`choose_acceleration`。 查看你是否可以定義一個駕駛規則,比`Driver`中的基本實現更好的。 你可能會嘗試到達更高的平均速度,或者更少的碰撞。
練習 2
注意:為了做這個練習,你必須安裝 VPython,一個用于 3D 顯示和動畫的庫。 如果你使用 Anaconda(我在第?節中推薦過),你可以執行:
```
conda install -c vpython vpython
```
然后運行本書倉庫中的`Boids7.py`。 閱讀代碼來查看,程序開始時定義的參數如何控制 boid 的行為。 試驗不同的參數。 如果通過將權重設置為 0 來“關閉”其中一種行為,會發生什么?
為了生成更多類似鳥類的行為,Flake 建議增加第四種行為來保持清晰的視線;換句話說,如果在正前方有另一只鳥,那么它就應該從側面移開。 你認為這個規則對鳥群的行為有什么影響? 實現它來看看。
練習 3
在 <http://en.wikipedia.org/wiki/Free_will> 上深入了解自由意志。 自由意志與決定論相容的觀點被稱為相容論。 相容論最大的挑戰之一是“結果論證”(consequence argument)。 什么是結果論證? 根據你在本書中讀到的內容,你對結果論證有什么樣的反應?
