

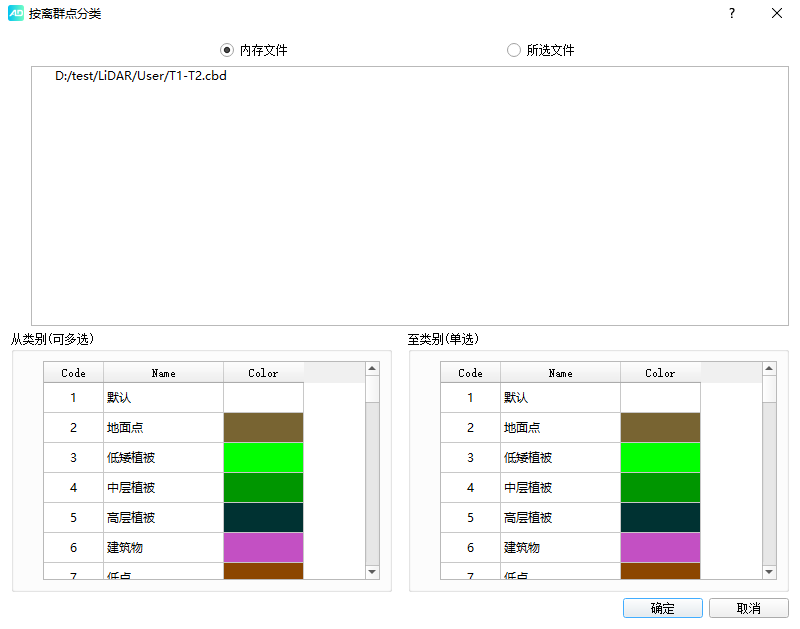
#### 按類別
**功能:**將已有類別的點云修改至另一類別。
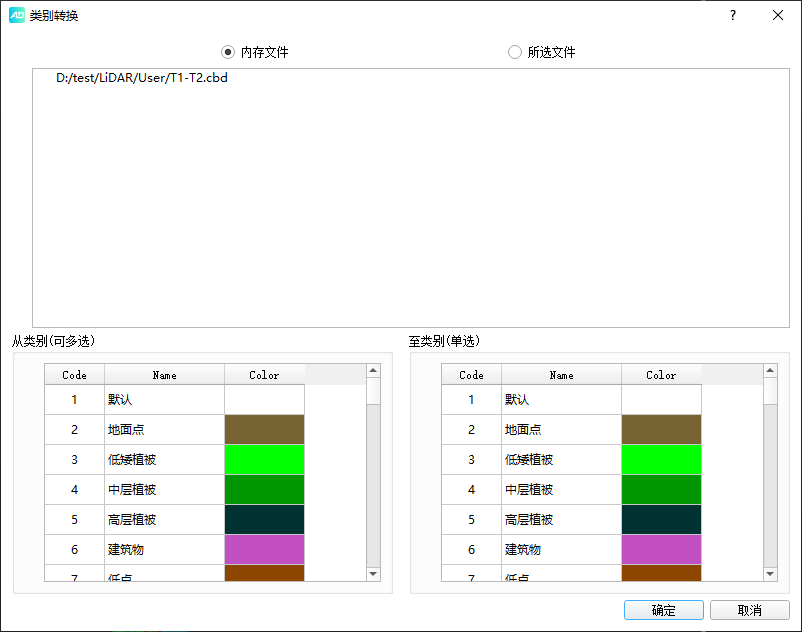
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
#### 按測距
**功能:**按點云距載體中心的距離進行分類。
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
LiDAR文件可選擇靜態LiDAR文件以及移動LiDAR文件。
從類別:待分類類別。
至類別:分類目標類別。
靜態LiDAR文件: 固定激光掃描儀獲取的LiDAR文件。
移動LiDAR文件: 移動激光掃描儀獲取的LiDAR文件。
有效距離:(默認從1m到600m)將在距視點設置距離范圍內的點進行分類。
- 當選擇為靜態LiDAR文件時:
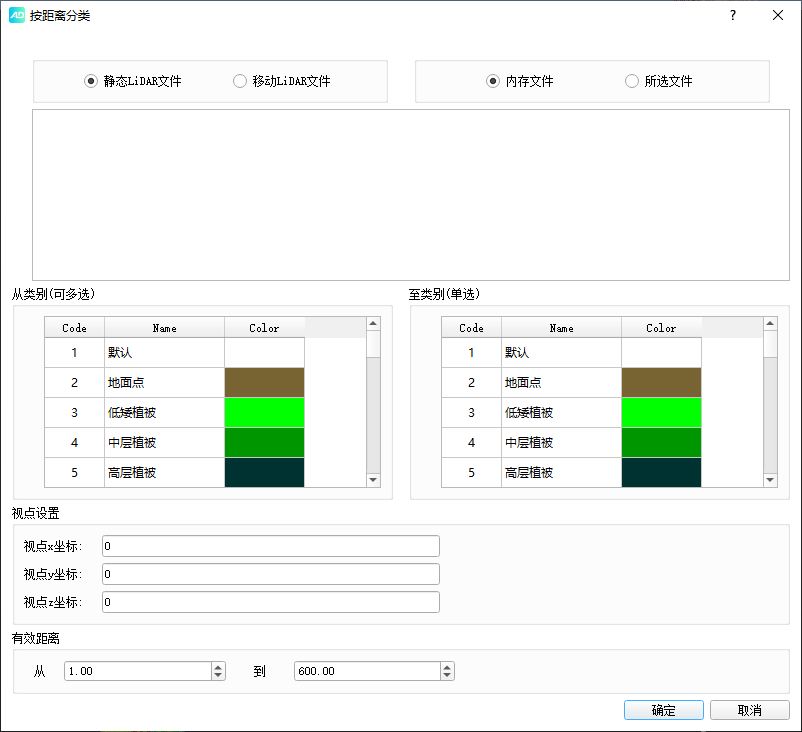
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
軌跡文件選擇:需選擇對應點云數據的軌跡文件。
視點設置:輸入儀器所在點位x坐標、y坐標、z坐標。
有效距離:(默認從1m到600m)將在距視點設置距離范圍內的點進行分類。

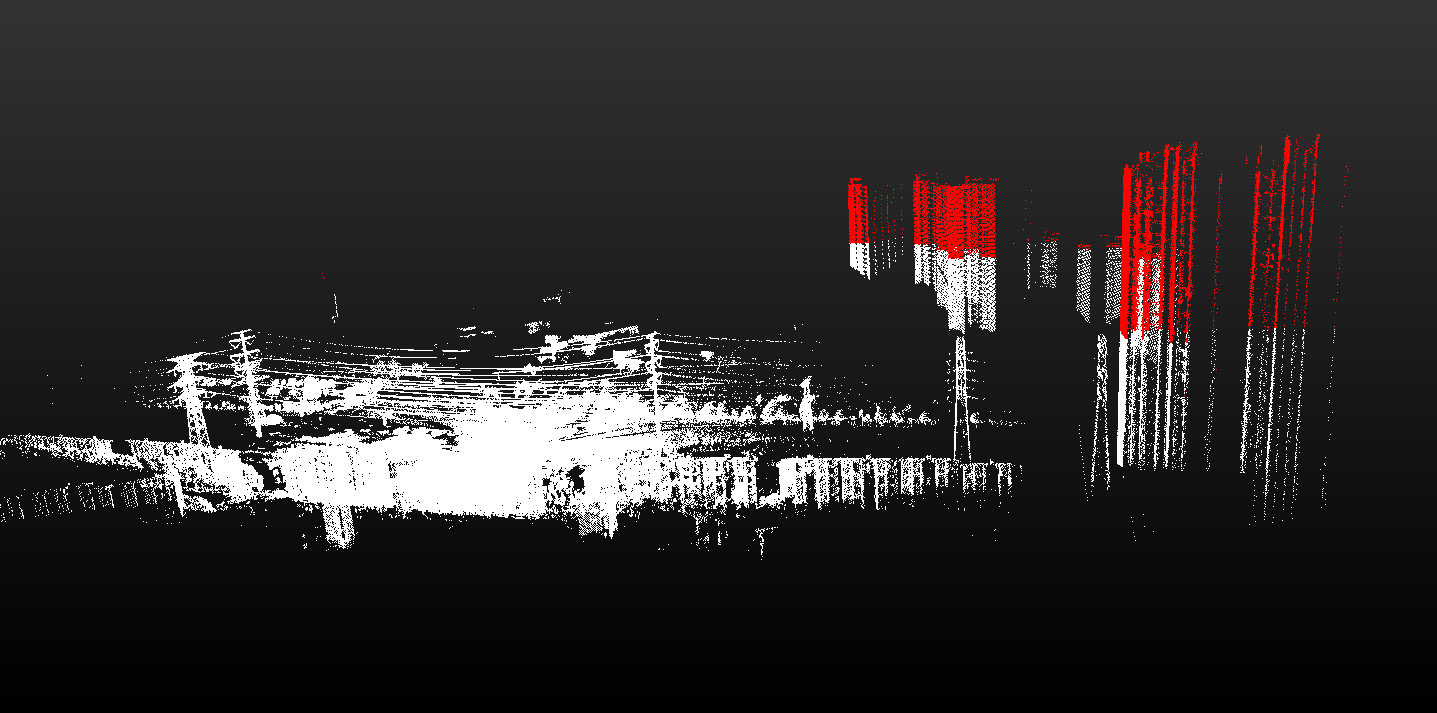
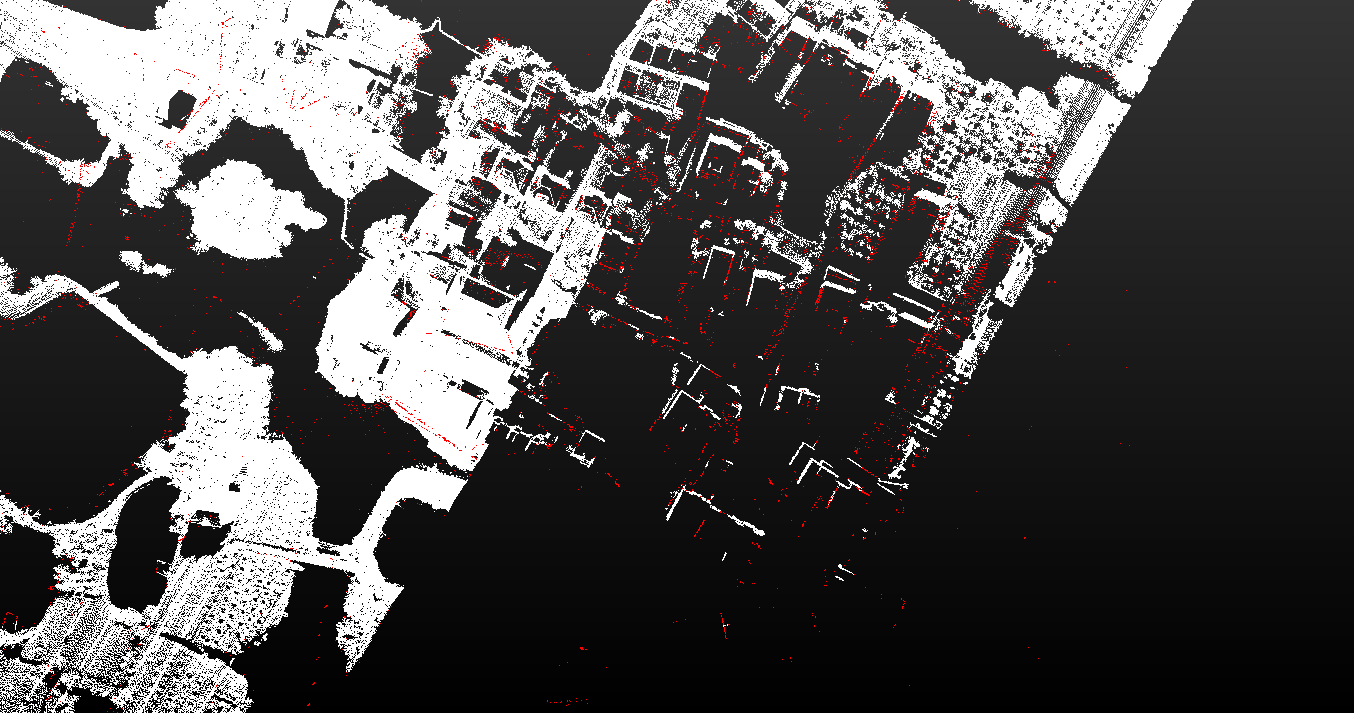
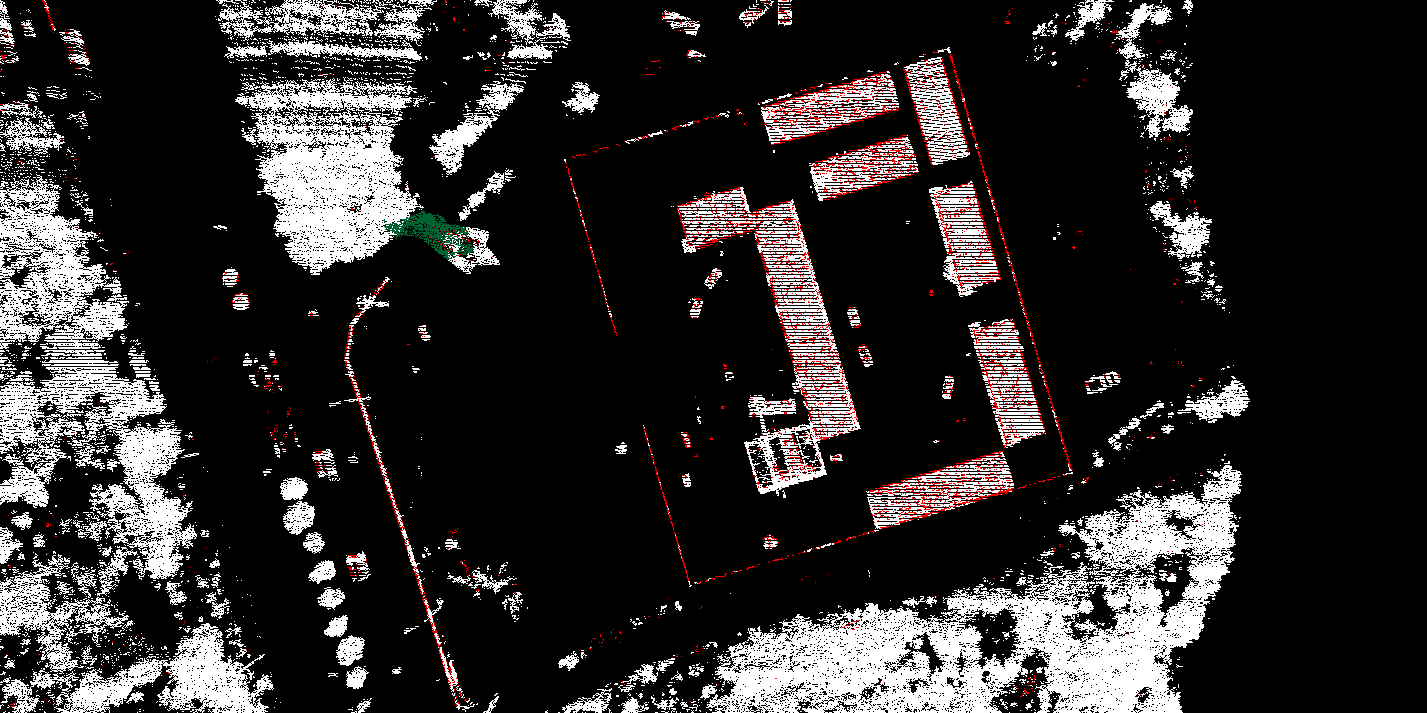
按距離分類,紅色為有效距離外的點
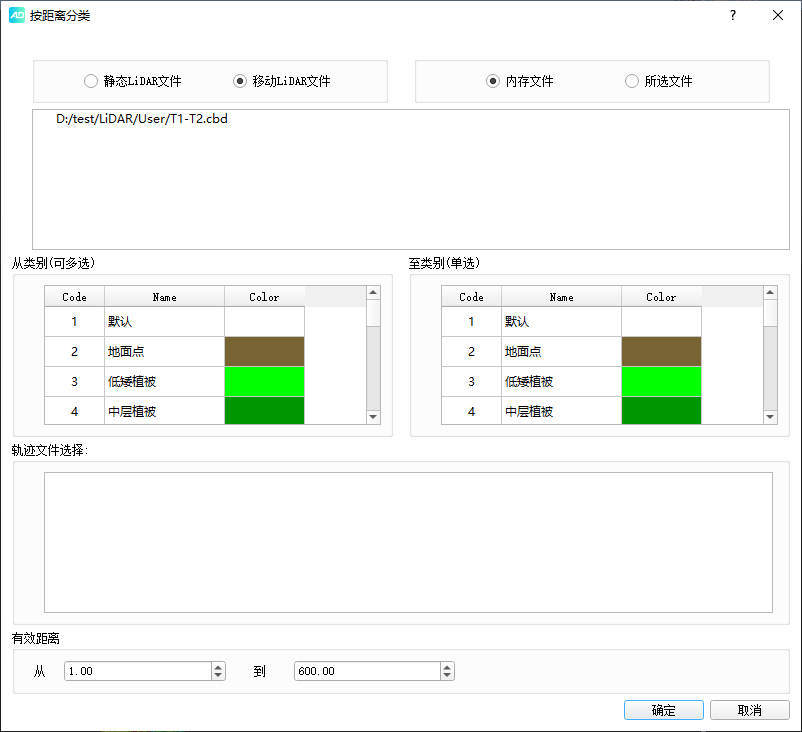
- 當選擇為移動LiDAR文件時:

內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
軌跡文件選擇:需選擇對應點云數據的軌跡文件。
有效距離:(默認從1m到600m)將在距視點設置距離范圍內的點進行分類。
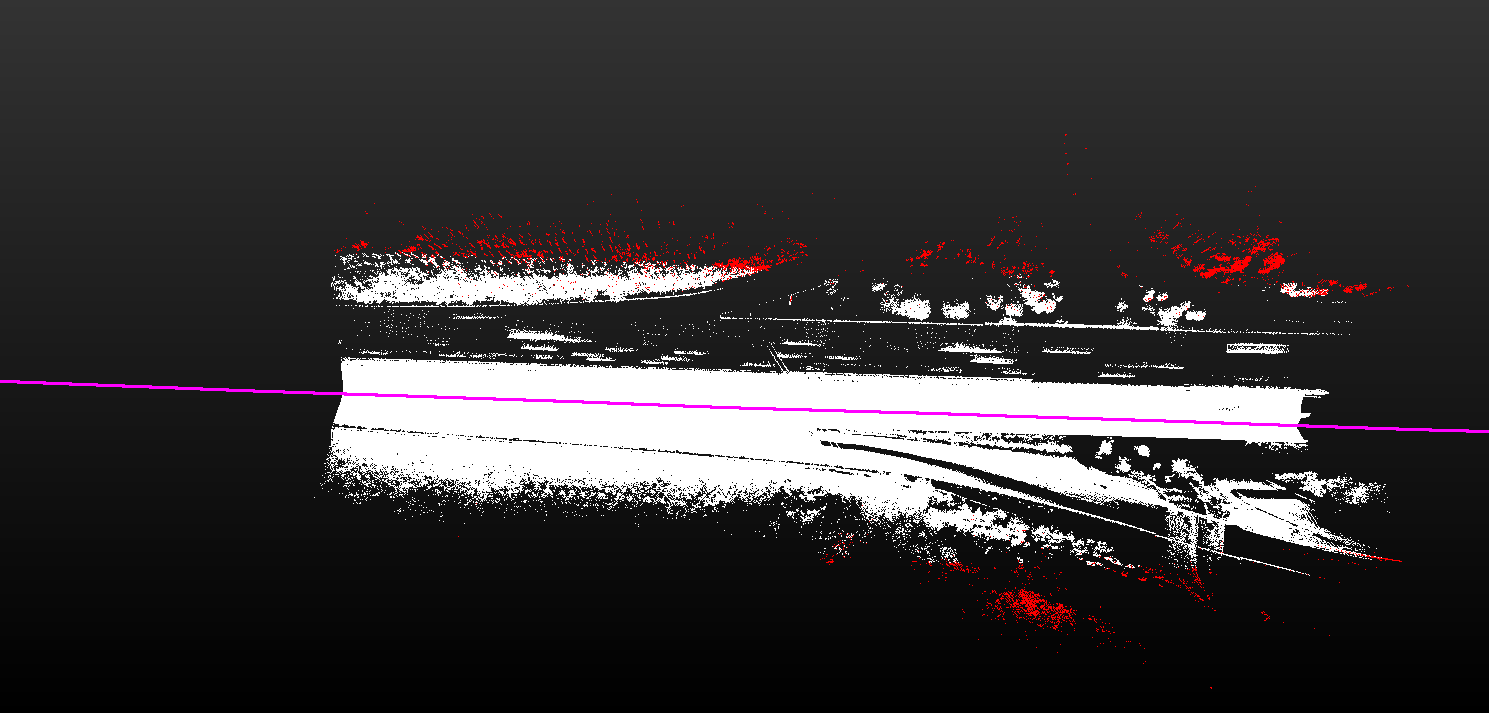
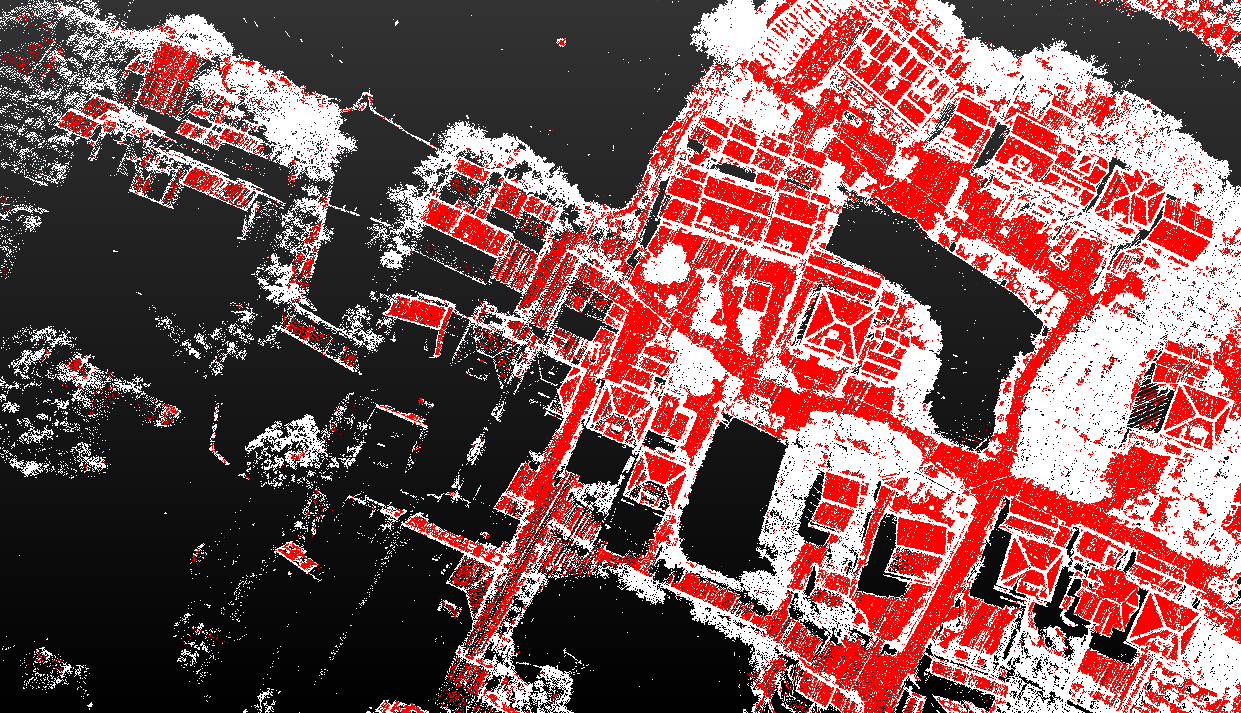
按距離分類,紅色為有效距離外的點
#### 按高程
**功能:**通過設置點云高程閾值對點云進行分類。
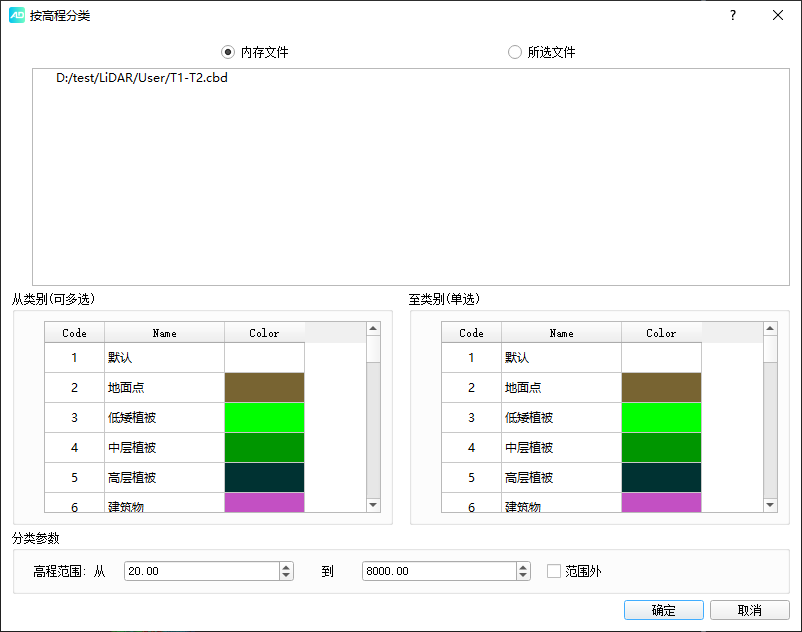
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
高程范圍:(默認從20m到8000m)對高程范圍內的點進行分類;勾選后,則是對所設置的高程范圍之外的點云進行分類。
#### 按高差
通過設置高差閾值對點云進行分類。
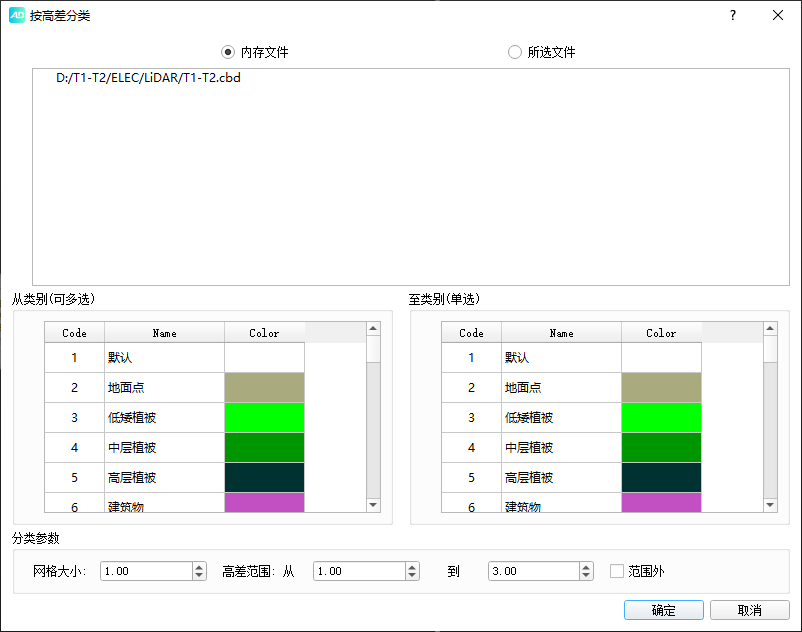
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
網格大小:所建立的二維格網區域大小,用于判斷該區域的高差范圍。
高差范圍:計算網格內的高差閾值標準,若高差在此范圍內,此格網內所有點云分類至目標類別(默認),勾選則對所在高差范圍外的點進行分類。
#### 按強度
**功能:**通過設置點云強度閾值對點云進行分類。
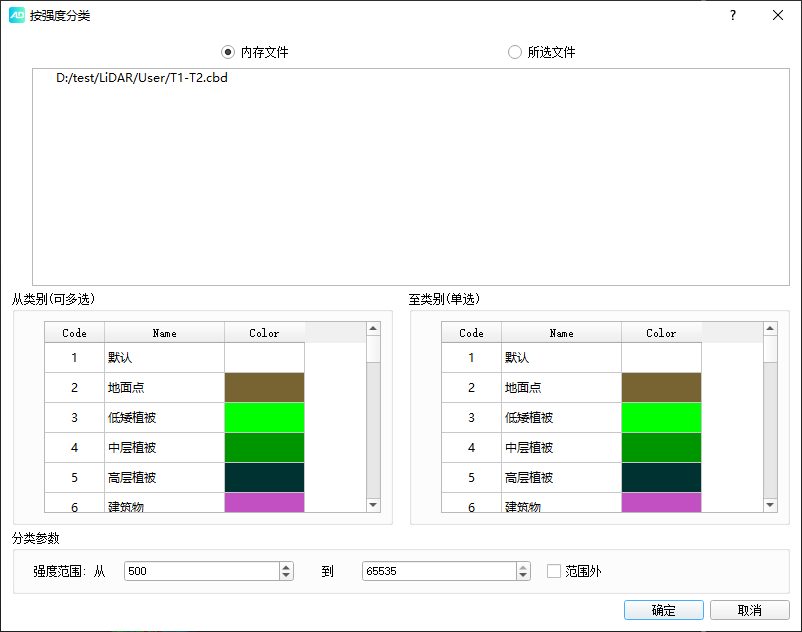
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
強度范圍:(默認從“500”到“65535(最大值)”)對強度范圍內的點進行分類;勾選后,則是對所設置的強度范圍之外的點云進行分類。
#### 離群點檢測
**功能:**可用于檢測識別稀疏的噪點,通過統計學濾波算法,對稀疏離散的點云進行分類。
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
#### 按曲率
**功能:**可用于植被點云的分類。按照計算的曲率數值進行分類。
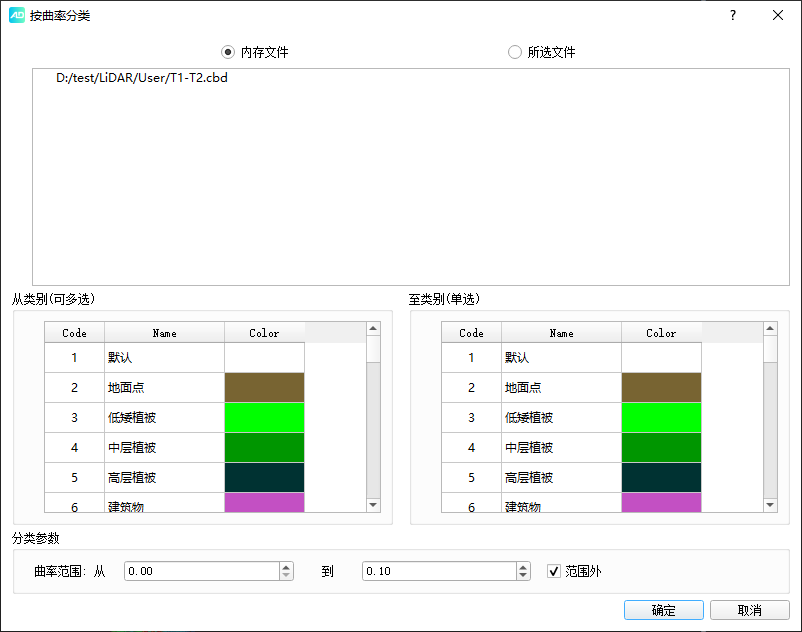
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
曲率范圍:(默認從0.00到0.10,默認)對在曲率范圍之外的點云進行分類;取消勾選則對所在曲率范圍內的點進行分類。

#### 按線性度
**功能:**用于提取線狀點云數據。通過計算點云線性度,按照計算的線性度數值進行分類。
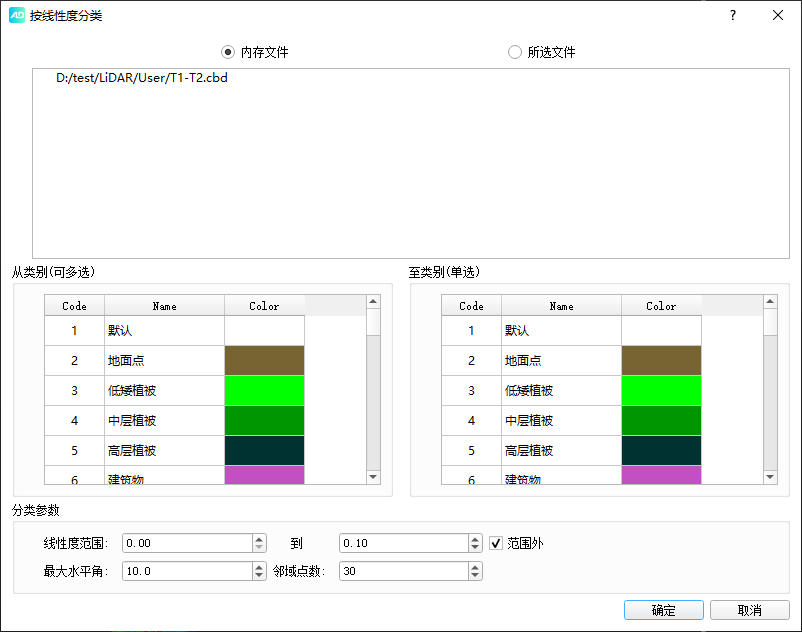
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
線性度范圍:(默認從0.00到0.10,默認)對在線性度范圍外的點云進行分類,取消勾選則對所在線性度范圍內的點進行分類。
最大水平角:(默認10.0°)待提取線與水平面最大夾角,選取在此夾角范圍內的點。
領域點數:(默認為30)判斷待提取線最少點數,選取大于此點數的線。
#### 按平面度
**功能:**用于提取面狀點云。遍歷點云中的點,計算點云平面度,按照平面度數值進行分類。
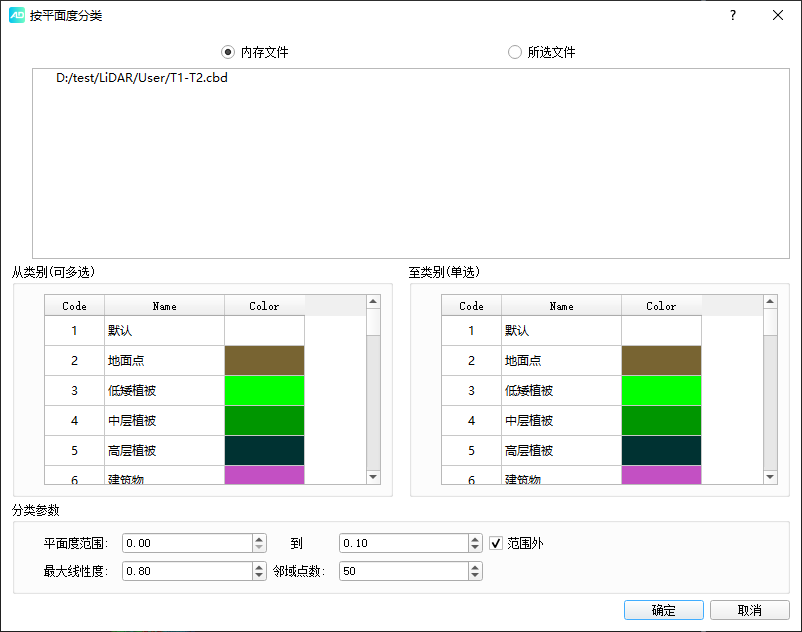
參數設置:
內存文件:在工程項目管理模塊中使用 加載 功能后的文件數據,會顯示在內存文件窗口中。
所選文件:在資源項目管理界面中選擇的數據,會顯示在所選文件窗口中。
從類別:待分類類別。
至類別:分類目標類別。
平面度范圍:(默認范圍從0.00到0.20,默認),對在平面度范圍外的點云進行分類,取消勾選則對所在平面度范圍內的點進行分類。
最大線性度:(默認0.40),對線性度小于最大線性度的平面進行分類
領域點數:判斷待提取線最少點數,選取大于此點數的平面。
- 概況
- 安裝與激活
- 軟件安裝
- 軟件購買及激活方法
- 在線激活
- 加密狗激活
- 系統備份和恢復
- 用戶登錄
- 模塊介紹
- 項目管理模塊
- 工作空間
- 項目
- 添加文件
- 更改文件
- 加載點云
- 停止任務
- 析出數據
- 文件屬性查看
- 選項
- 快捷操作
- 渲染模塊
- 渲染模式
- 點云顯示類型
- 軌跡顯示類型
- 顯示與定位
- 渲染設置
- 渲染視圖
- 編輯模塊
- 編輯模式
- 局部視圖
- 擴展選擇
- 選點類型
- 點操作
- 量測
- 保存編輯
- 控制點編輯
- 工具模塊
- 重采樣類型
- 按時間截取
- 數據分段
- 點云配準
- RGB更改
- 點云解析
- POS解算
- 精化模塊
- 精化方法
- 結果查看
- 分類模塊
- 分類方法
- 地物提取
- 電力模塊
- 添加文件
- 桿塔標記
- 電力切檔
- 補斷點
- 精細分類
- 矢量化
- 電力分析
- 精細巡檢
- 海量點云平臺
- 視圖模塊
- 窗口視圖
- 軌跡管理器
- 主題
- 附錄