

Alundar Platform點云處理軟件具備塔形自動識別、精細化航點輔助規劃、通道巡檢航點規劃功能。Alundar Platform點云處理軟件可進行精細化航線自動規劃及模板匹配(同類塔形快速復制)功能,高效為無人機可視精細化巡檢規劃航線。
#### 添加標記
**功能:**在點云上標記包括目標點、拍照點、輔助點。目標點即巡檢要拍照的目標,如絕緣子、塔基、塔身、掛點等。拍照點即無人機拍攝目標點時的停留航點。輔助點為無人機從一個拍照點飛行到下一個拍照點中需要繞過障礙的輔助航點。
步驟:
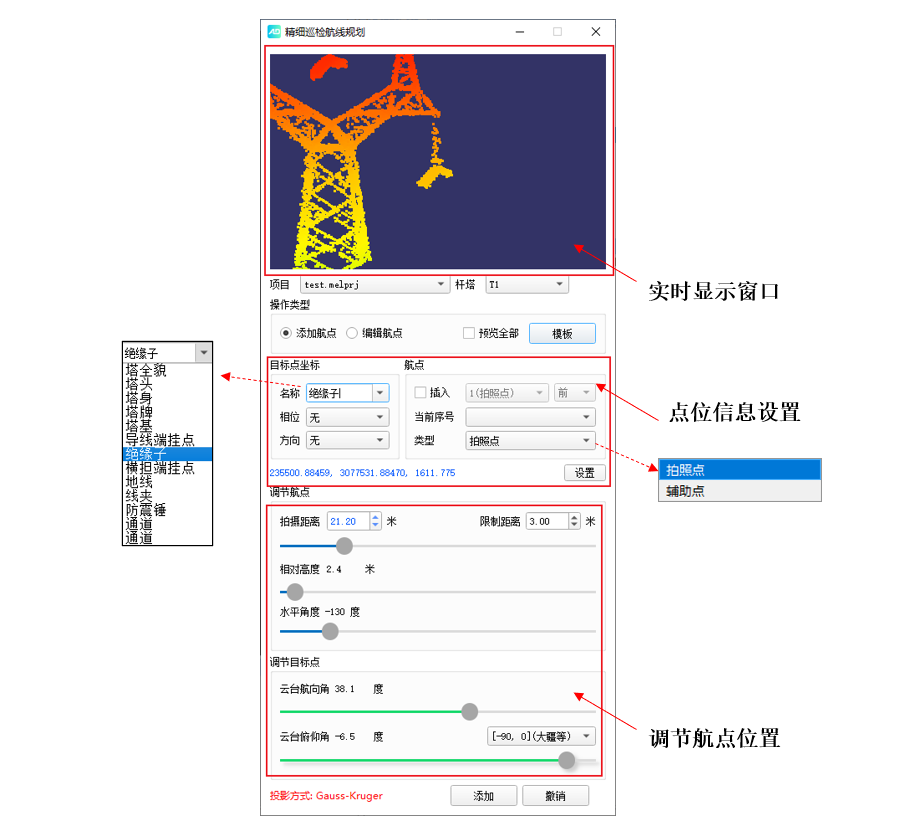
1. 打開點云,將需要標記的鐵塔選取到編輯視圖,點擊→按鈕,彈出精細化巡檢航線規劃界面,如下圖所示。界面分為三個部分組成,實時顯示窗口可觀測航點或者目標點實時的位置,有助于用戶選擇最佳的點位;通過點位設置欄實現對目標點和航點的詳細信息設置;通過調節航點欄設置航點在電力通道中的空間位置。
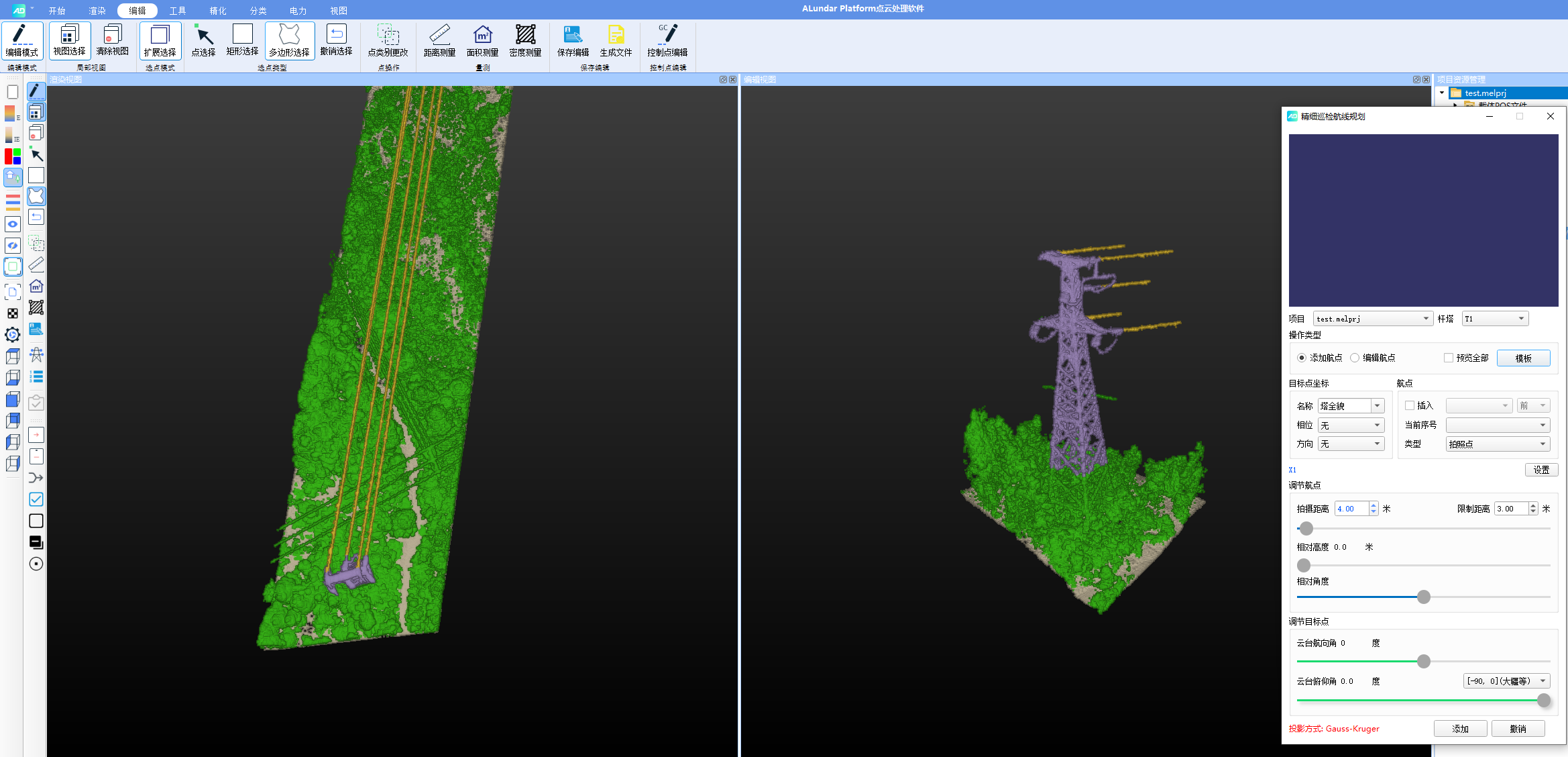
建議將左側渲染視圖切換到頂視圖模式,方便查看標點的水平位置,右側編輯視圖用于標點。
1. 在編輯菜單中,點擊→選點模式

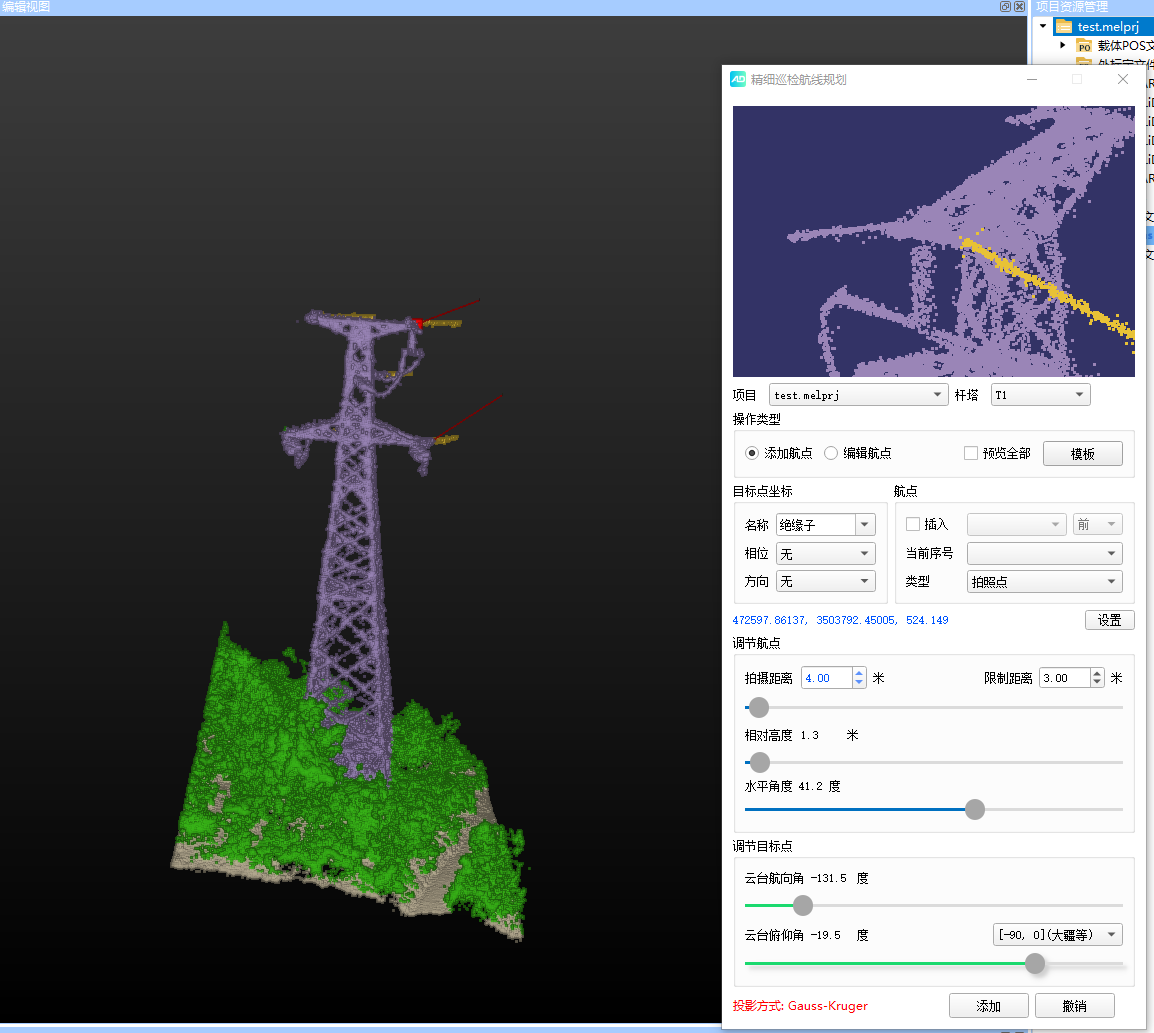
1. 根據信息輸出窗口提示,按住CTRL,在右側編輯視圖中點擊→目標點,比如某個絕緣端子。

選中點后,會看到標記對話框顯示了所選點的XYZ坐標,在精細化巡檢航線規劃窗口中,選擇目標點類型。先利用精細化巡檢規劃窗口上方實時顯示窗口觀察所選目標點位置,通過點位信息設置欄對“目標點坐標”、“航點”進行設置,通過“目標點坐標”設置目標點類型及相位等信息,再進行“航點”設置選擇航點類型點。通過“調節航點”設置航點與目標點的空間距離及角度關系。利用“調節目標點”設置無人機云臺懸停角度,點擊→添加。若要進行航點修改,可點擊→“編輯航點”,如下圖所示。可完成航點修改。
按照相同的步驟,逐個添加。
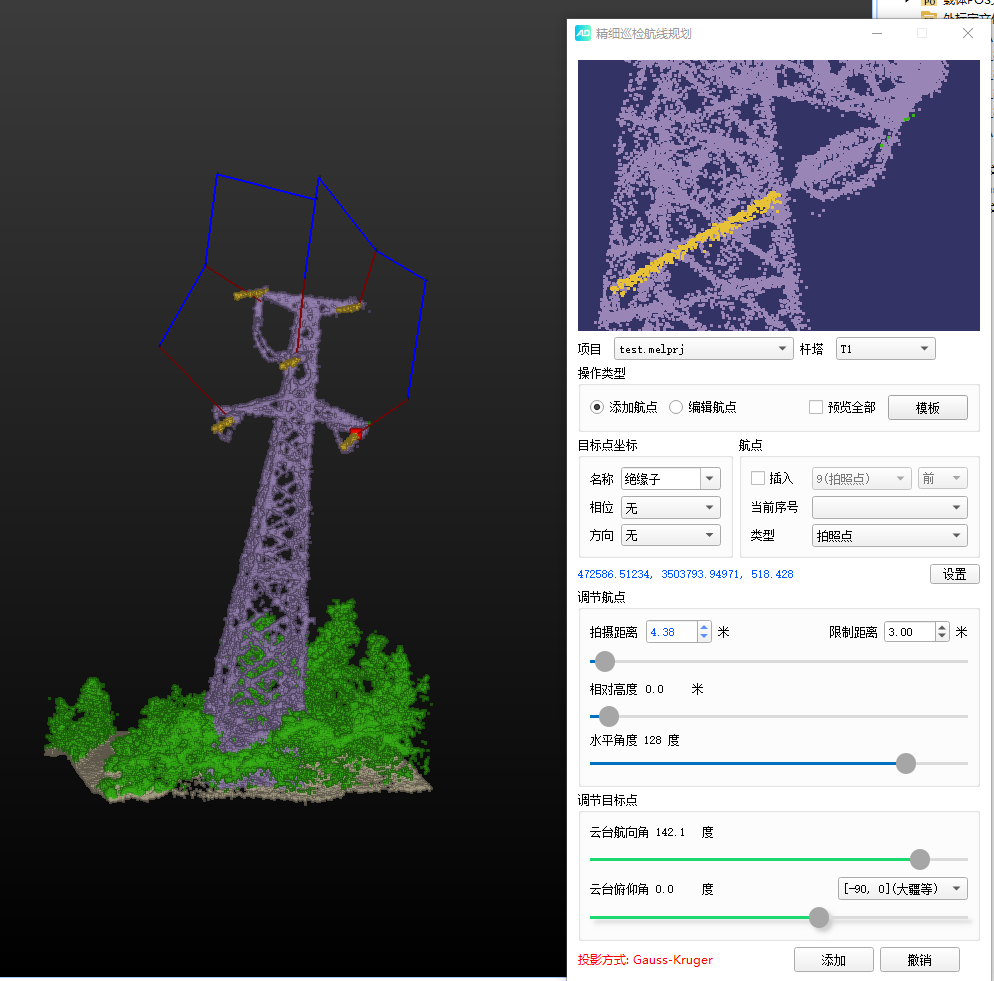
若航點設置錯誤需要修改,點擊→“編輯航點”則點擊編輯航點進行刪除、修改等操作,也可在航點間進行插入新的航點。
#### 查看標記
**功能:**查看上一步添加標記后的所有目標點、航點、輔助點的詳細信息,將標記的航點(拍照點、輔助點)導出為固定格式的航點文件,用于導入無人機執行精細巡檢任務。
步驟:
1.點擊→查看標記。
2.選擇要查看標記的項目,選擇項目文件,點擊→確認。
3\. 在彈出精細巡檢點列表對話框中,可進行航線的管理、格式設置、合并(分塔)以及導出航線等操作。航線文件支持從奧倫達科技的Alundar Plan APP導入,使用該APP可以操控大疆無人機執行巡檢任務,具體請查看官網-服務與支持-下載中心。

- 概況
- 安裝與激活
- 軟件安裝
- 軟件購買及激活方法
- 在線激活
- 加密狗激活
- 系統備份和恢復
- 用戶登錄
- 模塊介紹
- 項目管理模塊
- 工作空間
- 項目
- 添加文件
- 更改文件
- 加載點云
- 停止任務
- 析出數據
- 文件屬性查看
- 選項
- 快捷操作
- 渲染模塊
- 渲染模式
- 點云顯示類型
- 軌跡顯示類型
- 顯示與定位
- 渲染設置
- 渲染視圖
- 編輯模塊
- 編輯模式
- 局部視圖
- 擴展選擇
- 選點類型
- 點操作
- 量測
- 保存編輯
- 控制點編輯
- 工具模塊
- 重采樣類型
- 按時間截取
- 數據分段
- 點云配準
- RGB更改
- 點云解析
- POS解算
- 精化模塊
- 精化方法
- 結果查看
- 分類模塊
- 分類方法
- 地物提取
- 電力模塊
- 添加文件
- 桿塔標記
- 電力切檔
- 補斷點
- 精細分類
- 矢量化
- 電力分析
- 精細巡檢
- 海量點云平臺
- 視圖模塊
- 窗口視圖
- 軌跡管理器
- 主題
- 附錄