[TOC]
## 1. PID是什么?
PID是一種**控制**理論,是最常見,應用最廣泛的自動反饋系統。
## 2. PID的組成
PID由三部分組成,分別是P-比例、I-積分、D-微分。
## 3. PID的作用
PID控制系統就是用來消除系統誤差,讓系統的輸出值達到系統的期望值。
最簡單的PID控制規律的表達式如式(3-1),它的框圖如圖3-1。
:-: 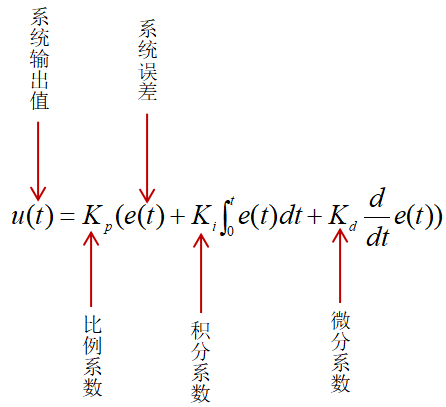
式(3-1)
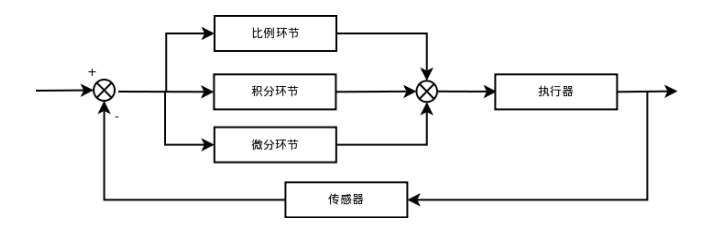
圖 3-1 最簡單的PID框圖
PID的三個環節的作用分別如下:
**(1)P-比例環節:** 控制系統響應的快慢,比例越大,響應越快,缺點是存在靜態誤差,這個靜態誤差交給**I-積分環節**來解決。
**(2)I-積分環節:** 作用是:消除靜態誤差。所謂靜態誤差,就是系統穩定后輸出值和設定值之間的差值,積分環節實際上就是偏差累計的過程,把累計的誤差加到原有系統上以抵消系統造成的靜態誤差。
**(3)D-微分環節:** 作用是:反應偏差信號的變化規律,或者說是變化趨勢,根據偏差信號的變化趨勢來進行超前調節,從而增加了系統的快速性。
