對于PX4的數據處理流程可以簡單看做如圖4-1:
:-: 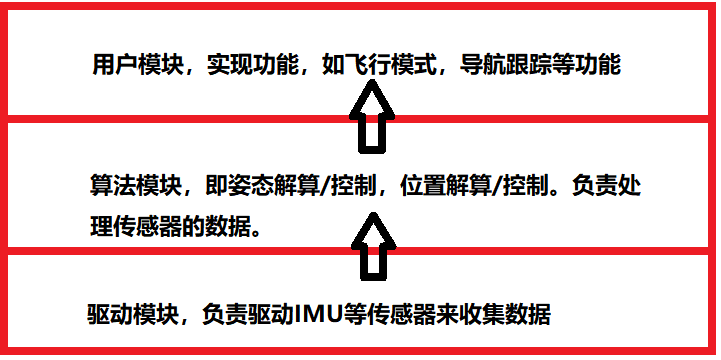
圖 4-1
將上圖細分后,PX4的數據處理流程如圖4-2,
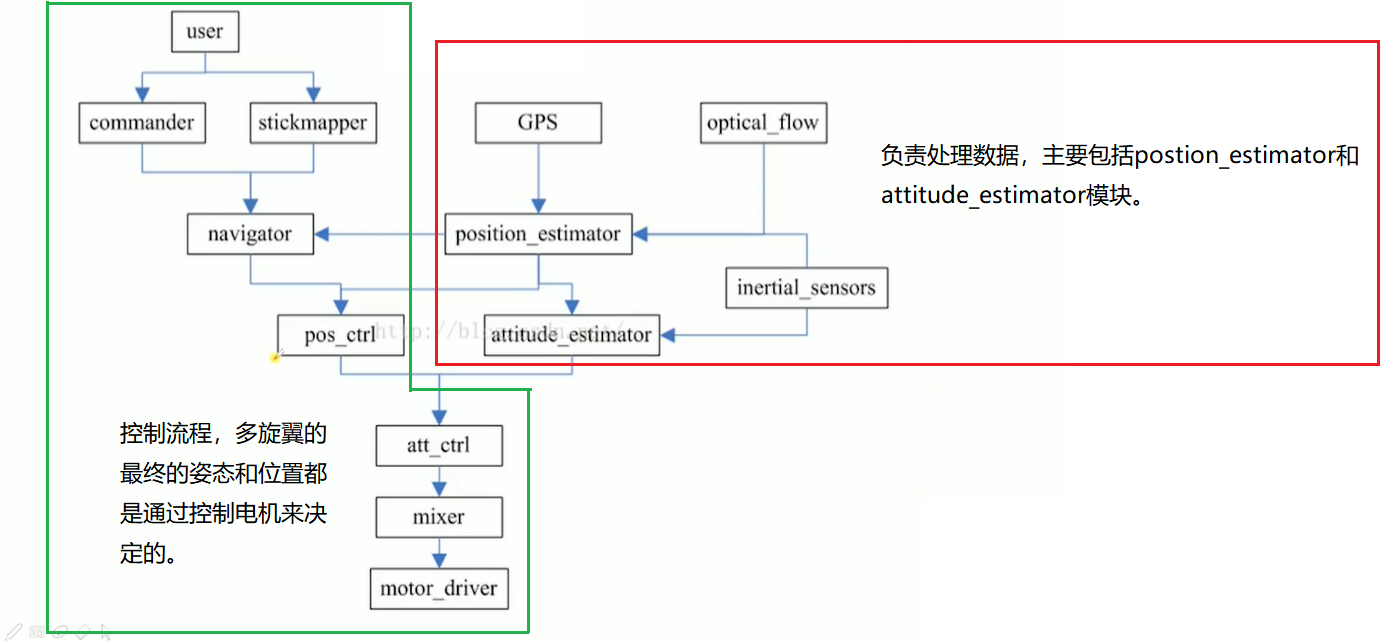
:-: 圖4-2 PX的數據處理流程
* user:用戶
* commander:模式切換,它會判斷目前的傳感器是否支持一些飛行模式。
* navigator:確定飛行模式后,決定無人機該怎么飛。
* pos_ctrl:位置控制。
* att_ctr:姿態控制。
* mixer:力矩分配。
* motor_driver:驅動電機,從而實現無人機的運動。
