傳感器部分,即IMU慣性測量單元,它主要由加速度計、陀螺儀、磁力計組成,負責采集無人機姿態數據。
[TOC]
# 1. 加速度計
加速度計用來獲取加速度,從而獲得無人機的橫滾角Roll和俯仰角Pitch,無法獲得偏航角Yaw。使用加速度計測量得到的角度無累積誤差,低頻特性比價好,但容易受到高頻振動的影響。加速度計測得加速度后可以按式(4.1.2-1)獲取角度:
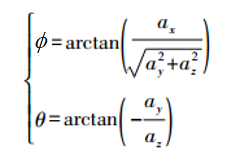---------------------------------------------------(4.1.2-1)
其中,`$ a_{x},a_{y},a_{z} $`為加速度計測得的加速度在三個方向的分量;`$ \phi ,\theta $`分別是繞X軸旋轉得到的橫滾角和繞Y軸旋轉得到的俯仰角。[關于坐標系的定義見4.1.3-1小節與4.1.3-2小節](http://www.hmoore.net/book/king_om/px_4/edit#1__5)
# 2. 陀螺儀
陀螺儀用來測量角速度,高頻特性好。可以根據科里奧利力表達式:`$ F_{coriolis}=2m^{b}w×v $`求出角速度。然后通過對角速度進行積分得出角度,所以說陀螺儀也可以測量角度,包括橫滾角Roll、俯仰角Pitch、偏航角Yaw。
# 3. 磁力計
磁場的變化會導致磁阻傳感器電阻值發生變化,所以磁力計可以用來獲取無人機飛行地點的磁場分布,從而獲取偏航角Yaw和俯仰角Pitch,無法獲取橫滾角Roll,另外磁力計很容易受到干擾。

其中`$ m_{x}^{n},m_{y}^{n} $`為在磁場分量;`$ \psi_{mag} $`為繞Z軸得到的偏航角。
