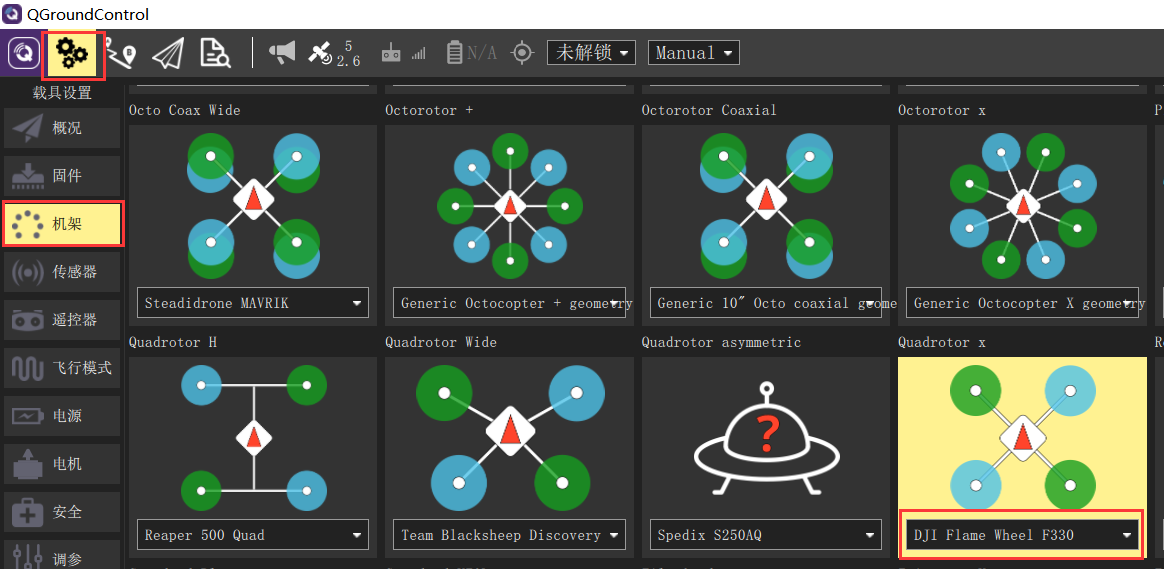
進行調試前先要選定的無人機的類型,不同的類型的無人機PID參數可能不一樣。以下為本次調試選用的F330機架。
在3.2-2節中說過PX4使用的是雙環控制器,一般只需調內環即可,而內環又只需調整俯仰(Pitch)的PID和橫滾(Roll)的PID即可。如下圖:
<br/>
對內環俯仰PID的調參結果如下圖:
<br/>
所以決定內環俯仰PID采用:**P=0.6,I=0.02,D=0.006**;內環橫滾PID采用:**P=0.5,I=0.02,D=0.006**。修改參數后如下:

