
[TOC]
## SharedPreferences存在的問題
### SP的效率比較低
1.讀寫方式:直接I/O
2.數據格式:xml
3.寫入方式:全量更新
由于SP使用的xml格式保存數據,所以每次更新數據只能全量替換更新數據
這意味著如果我們有100個數據,如果只更新一項數據,也需要將所有數據轉化成xml格式,然后再通過io寫入文件中
這也導致SP的寫入效率比較低
### commit導致的ANR
~~~
public boolean commit() {
// 在當前線程將數據保存到mMap中
MemoryCommitResult mcr = commitToMemory();
SharedPreferencesImpl.this.enqueueDiskWrite(mcr, null);
try {
// 如果是在singleThreadPool中執行寫入操作,通過await()暫停主線程,直到寫入操作完成。
// commit的同步性就是通過這里完成的。
mcr.writtenToDiskLatch.await();
} catch (InterruptedException e) {
return false;
}
/*
* 回調的時機:
* 1. commit是在內存和硬盤操作均結束時回調
* 2. apply是內存操作結束時就進行回調
*/
notifyListeners(mcr);
return mcr.writeToDiskResult;
}
~~~
如上所示
1.commit有返回值,表示修改是否提交成功
2.commit提交是同步的,直到磁盤操作成功后才會完成
所以當數據量比較大時,使用commit很可能引起ANR
### Apply導致的ANR
commit是同步的,同時SP也提供了異步的apply
apply是將修改數據原子提交到內存, 而后異步真正提交到硬件磁盤, 而commit是同步的提交到硬件磁盤,因此,在多個并發的提交commit的時候,他們會等待正在處理的commit保存到磁盤后在操作,從而降低了效率。而apply只是原子的提交到內容,后面有調用apply的函數的將會直接覆蓋前面的內存數據,這樣從一定程度上提高了很多效率
但是apply同樣會引起ANR的問題
~~~
public void apply() {
final long startTime = System.currentTimeMillis();
final MemoryCommitResult mcr = commitToMemory();
final Runnable awaitCommit = new Runnable() {
@Override
public void run() {
mcr.writtenToDiskLatch.await(); // 等待
......
}
};
// 將 awaitCommit 添加到隊列 QueuedWork 中
QueuedWork.addFinisher(awaitCommit);
Runnable postWriteRunnable = new Runnable() {
@Override
public void run() {
awaitCommit.run();
QueuedWork.removeFinisher(awaitCommit);
}
};
SharedPreferencesImpl.this.enqueueDiskWrite(mcr, postWriteRunnable);
}
~~~
* 將一個 `awaitCommit` 的 `Runnable` 任務,添加到隊列 `QueuedWork` 中,在 `awaitCommit` 中會調用 `await()` 方法等待,在 `handleStopService` 、 `handleStopActivity` 等等生命周期會以這個作為判斷條件,等待任務執行完畢
* 將一個 `postWriteRunnable` 的 `Runnable` 寫任務,通過 `enqueueDiskWrite` 方法,將寫入任務加入到隊列中,而寫入任務在一個線程中執行
為了保證異步任務及時完成,當生命周期處于 `handleStopService()` 、 `handlePauseActivity()` 、 `handleStopActivity()` 的時候會調用 `QueuedWork.waitToFinish()` 會等待寫入任務執行完畢
~~~
private static final ConcurrentLinkedQueue<Runnable> sPendingWorkFinishers =
new ConcurrentLinkedQueue<Runnable>();
public static void waitToFinish() {
Runnable toFinish;
while ((toFinish = sPendingWorkFinishers.poll()) != null) {
toFinish.run(); // 相當于調用 `mcr.writtenToDiskLatch.await()` 方法
}
}
~~~
* `sPendingWorkFinishers` 是 `ConcurrentLinkedQueue` 實例,`apply` 方法會將寫入任務添加到 `sPendingWorkFinishers`隊列中,在單個線程的線程池中執行寫入任務,線程的調度并不由程序來控制,也就是說當生命周期切換的時候,任務不一定處于執行狀態
* `toFinish.run()` 方法,相當于調用 `mcr.writtenToDiskLatch.await()` 方法,會一直等待
* `waitToFinish()` 方法就做了一件事,會一直等待寫入任務執行完畢,其它什么都不做,當有很多寫入任務,會依次執行,當文件很大時,效率很低,造成 ANR 就不奇怪了
所以當數據量比較大時,`apply`也會造成ANR
### getXXX() 導致ANR
不僅是寫入操作,所有 getXXX() 方法都是同步的,在主線程調用 get 方法,必須等待 SP 加載完畢,也有可能導致ANR
調用 `getSharedPreferences()` 方法,最終會調用 `SharedPreferencesImpl#startLoadFromDisk()` 方法開啟一個線程異步讀取數據。
~~~kotlin
private final Object mLock = new Object();
private boolean mLoaded = false;
private void startLoadFromDisk() {
synchronized (mLock) {
mLoaded = false;
}
new Thread("SharedPreferencesImpl-load") {
public void run() {
loadFromDisk();
}
}.start();
}
復制代碼
~~~
正如你所看到的,開啟一個線程異步讀取數據,當我們正在讀取一個比較大的數據,還沒讀取完,接著調用 `getXXX()` 方法。
~~~kotlin
public String getString(String key, @Nullable String defValue) {
synchronized (mLock) {
awaitLoadedLocked();
String v = (String)mMap.get(key);
return v != null ? v : defValue;
}
}
private void awaitLoadedLocked() {
......
while (!mLoaded) {
try {
mLock.wait();
} catch (InterruptedException unused) {
}
}
......
}
~~~
在同步方法內調用了 `wait()` 方法,會一直等待 `getSharedPreferences()` 方法開啟的線程讀取完數據才能繼續往下執行,如果讀取幾 KB 的數據還好,假設讀取一個大的文件,勢必會造成主線程阻塞。
## MMKV的使用
MMKV 是基于 mmap 內存映射的 key-value 組件,底層序列化/反序列化使用 protobuf 實現,性能高,穩定性強。從 2015 年中至今在微信上使用,其性能和穩定性經過了時間的驗證。近期也已移植到 Android / macOS / Win32 / POSIX 平臺,一并開源。
### MMKV優點
1.MMKV實現了SharedPreferences接口,可以無縫切換
2.通過 mmap 內存映射文件,提供一段可供隨時寫入的內存塊,App 只管往里面寫數據,由操作系統負責將內存回寫到文件,不必擔心 crash 導致數據丟失。
3.MMKV數據序列化方面選用 protobuf 協議,pb 在性能和空間占用上都有不錯的表現
4.SP是全量更新,MMKV是增量更新,有性能優勢
詳細的使用細節可以參考文檔:[github.com/Tencent/MMK…](https://link.juejin.cn?target=https%3A%2F%2Fgithub.com%2FTencent%2FMMKV%2Fwiki "https://github.com/Tencent/MMKV/wiki")
## MMKV原理
### 為什么MMKV寫入速度更快
#### IO操作
我們知道,SP是寫入是基于IO操作的,為了了解IO,我們需要先了解下用戶空間與內核空間
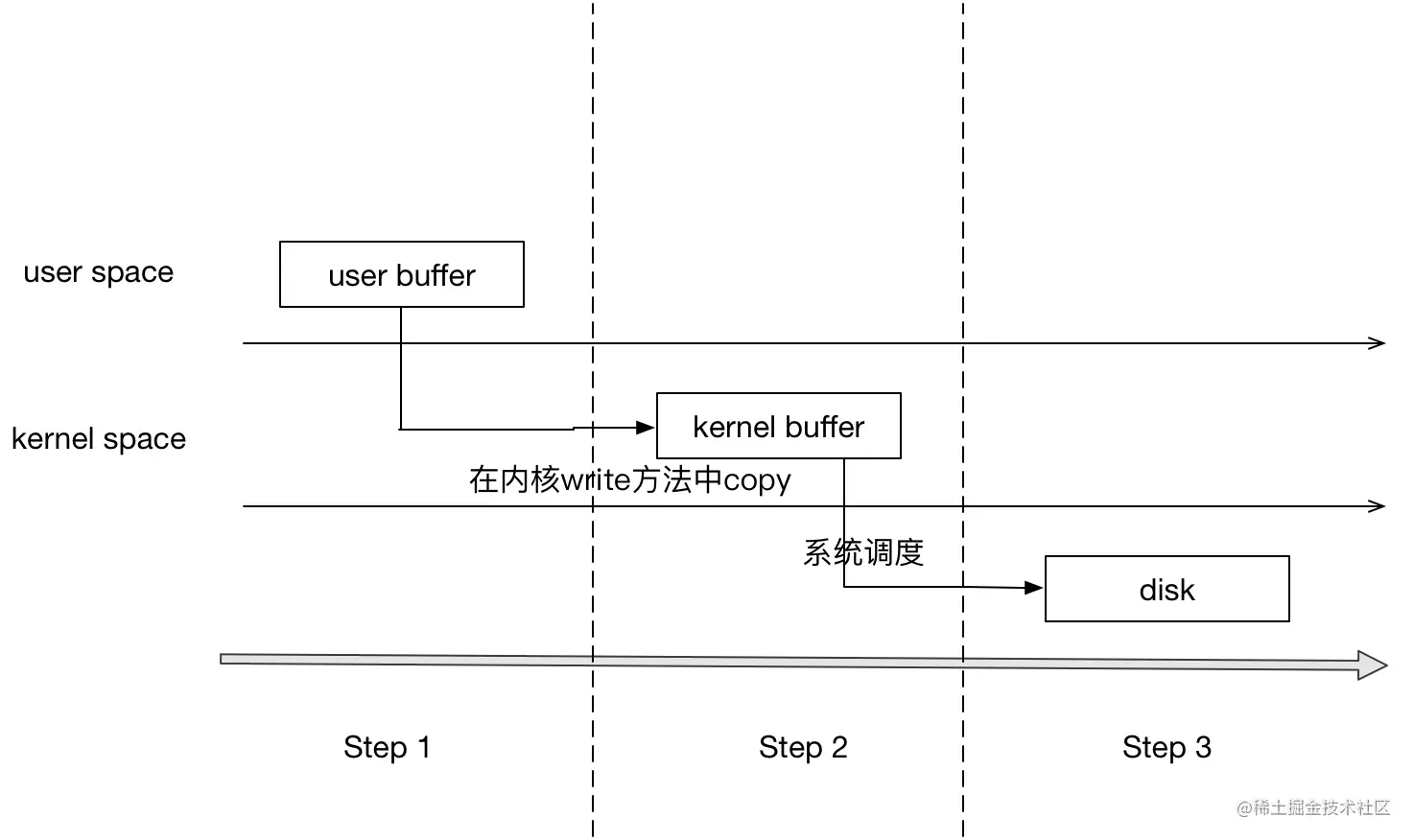
虛擬內存被操作系統劃分成兩塊:用戶空間和內核空間,用戶空間是用戶程序代碼運行的地方,內核空間是內核代碼運行的地方。為了安全,它們是隔離的,即使用戶的程序崩潰了,內核也不受影響。 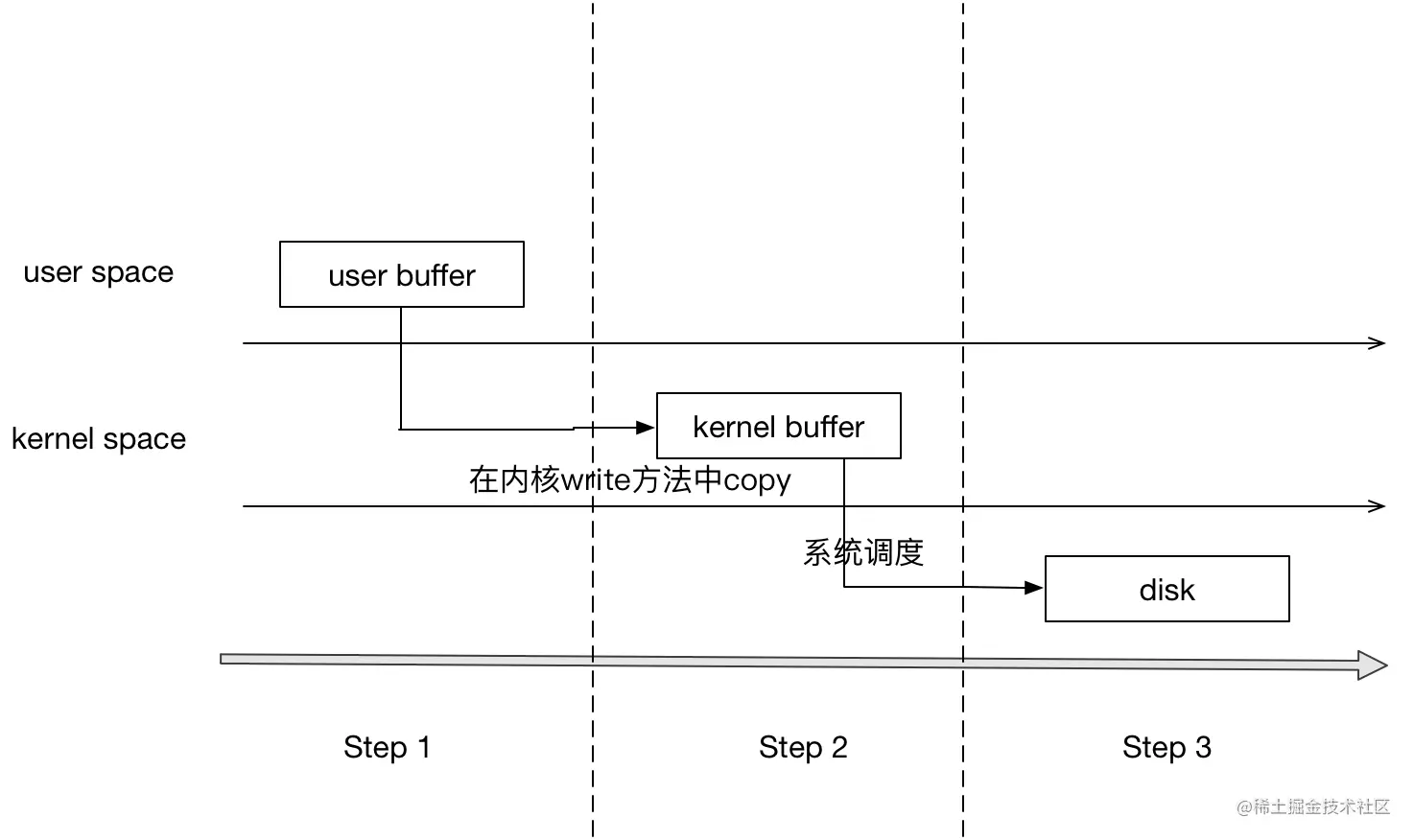 **寫文件流程:**
1、調用write,告訴內核需要寫入數據的開始地址與長度
2、內核將數據拷貝到內核緩存
3、由操作系統調用,將數據拷貝到磁盤,完成寫入
#### MMAP
Linux通過將一個虛擬內存區域與一個磁盤上的對象關聯起來,以初始化這個虛擬內存區域的內容,這個過程稱為內存映射(memory mapping)。
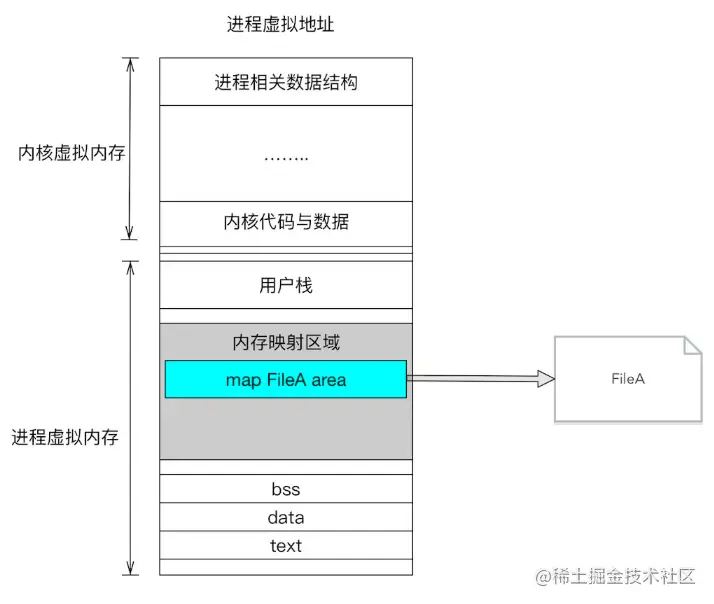
對文件進行mmap,會在進程的虛擬內存分配地址空間,創建映射關系。
實現這樣的映射關系后,就可以采用指針的方式讀寫操作這一段內存,而系統會自動回寫到對應的文件磁盤上
#### MMAP優勢
* MMAP對文件的讀寫操作只需要從磁盤到用戶主存的一次數據拷貝過程,減少了數據的拷貝次數,提高了文件讀寫效率。
* MMAP使用邏輯內存對磁盤文件進行映射,操作內存就相當于操作文件,不需要開啟線程,操作MMAP的速度和操作內存的速度一樣快;
* MMAP提供一段可供隨時寫入的內存塊,App 只管往里面寫數據,由操作系統如內存不足、進程退出等時候負責將內存回寫到文件,不必擔心 crash 導致數據丟失。
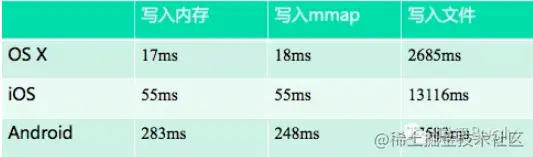
可以看出,MMAP的寫入速度基本與內存寫入速度一致,遠高于SP,這就是MMKV寫入速度更快的原因
### MMKV寫入方式
#### SP的數據結構
SP是使用XML格式存儲數據的,如下所示
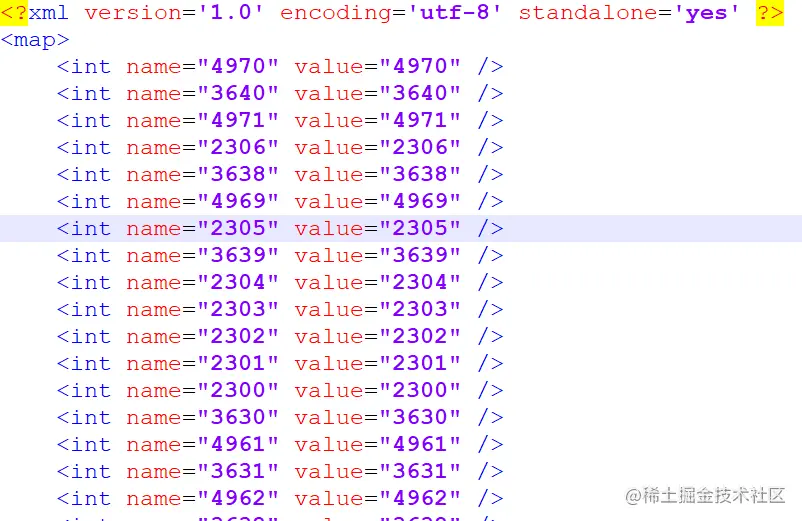
但是這也導致SP如果要更新數據的話,只能全量更新
#### MMKV數據結構
MMKV數據結構如下
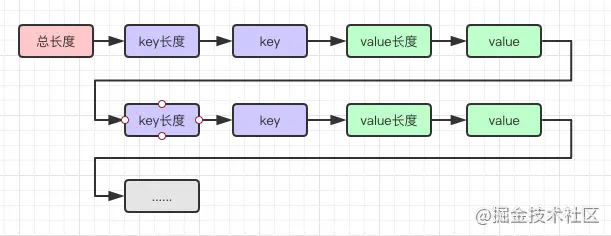
MMKV使用Protobuf存儲數據,冗余數據更少,更省空間,同時可以方便地在末尾追加數據
#### 寫入方式
**增量寫入**
不管key是否重復,直接將數據追加在前數據后。 這樣效率更高,更新數據只需要插入一條數據即可。
當然這樣也會帶來問題,如果不斷增量追加內容,文件越來越大,怎么辦?
當文件大小不夠,這時候需要全量寫入。將數據去掉重復key后,如果文件大小滿足寫入的數據大小,則可以直接更新全量寫入,否則需要擴容。(在擴容時根據平均每個K-V大小計算未來可能需要的文件大小進行擴容,防止經常性的全量寫入)
### MMKV三大優勢
* mmap防止數據丟失,提高讀寫效率;
* 精簡數據,以最少的數據量表示最多的信息,減少數據大小;
* 增量更新,避免每次進行相對增量來說大數據量的全量寫入。
- Android
- 四大組件
- Activity
- Fragment
- Service
- 序列化
- Handler
- Hander介紹
- MessageQueue詳細
- 啟動流程
- 系統啟動流程
- 應用啟動流程
- Activity啟動流程
- View
- view繪制
- view事件傳遞
- choreographer
- LayoutInflater
- UI渲染概念
- Binder
- Binder原理
- Binder最大數據
- Binder小結
- Android組件
- ListView原理
- RecyclerView原理
- SharePreferences
- AsyncTask
- Sqlite
- SQLCipher加密
- 遷移與修復
- Sqlite內核
- Sqlite優化v2
- sqlite索引
- sqlite之wal
- sqlite之鎖機制
- 網絡
- 基礎
- TCP
- HTTP
- HTTP1.1
- HTTP2.0
- HTTPS
- HTTP3.0
- HTTP進化圖
- HTTP小結
- 實踐
- 網絡優化
- Json
- ProtoBuffer
- 斷點續傳
- 性能
- 卡頓
- 卡頓監控
- ANR
- ANR監控
- 內存
- 內存問題與優化
- 圖片內存優化
- 線下內存監控
- 線上內存監控
- 啟動優化
- 死鎖監控
- 崩潰監控
- 包體積優化
- UI渲染優化
- UI常規優化
- I/O監控
- 電量監控
- 第三方框架
- 網絡框架
- Volley
- Okhttp
- 網絡框架n問
- OkHttp原理N問
- 設計模式
- EventBus
- Rxjava
- 圖片
- ImageWoker
- Gilde的優化
- APT
- 依賴注入
- APT
- ARouter
- ButterKnife
- MMKV
- Jetpack
- 協程
- MVI
- Startup
- DataBinder
- 黑科技
- hook
- 運行期Java-hook技術
- 編譯期hook
- ASM
- Transform增量編譯
- 運行期Native-hook技術
- 熱修復
- 插件化
- AAB
- Shadow
- 虛擬機
- 其他
- UI自動化
- JavaParser
- Android Line
- 編譯
- 疑難雜癥
- Android11滑動異常
- 方案
- 工業化
- 模塊化
- 隱私合規
- 動態化
- 項目管理
- 業務啟動優化
- 業務架構設計
- 性能優化case
- 性能優化-排查思路
- 性能優化-現有方案
- 登錄
- 搜索
- C++
- NDK入門
- 跨平臺
- H5
- Flutter
- Flutter 性能優化
- 數據跨平臺