
[TOC]
## **1、納博特示教軟件下載**
## **教程視頻**
<iframe src="//player.bilibili.com/player.html?aid=552502344&bvid=BV1pi4y1k7mW&cid=556692669&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"width="670px" height="442px"> </iframe>
>納博特虛擬示教器軟件下載地址[鏈接](https://pan.baidu.com/s/1nKulSUV0xV8goGyoFYoLTQ),提取碼:iiii。
******
## **2、IOA與納博特軟件模擬仿真**
IOA虛擬工廠連接納博特虛擬示教器操作視頻[鏈接](https://www.bilibili.com/video/BV1dv411n7p9/)
IOA虛擬工廠與虛擬納博特機器人連接步驟說明如下:
### (1)添加納博特機器人虛擬控制器
在IOA虛擬工廠菜單欄中點擊控制器添加-工業機器人-NRC_R6_V1,添加一個納博特六軸機器人控制器。

### (2)添加六軸機器人模型,并給機器人伺服配線
在IOA虛擬工廠里添加一臺合適的六軸機器人模型,并且將NRC_R6_V1的R6伺服配置給機器人的R6。

### (3)打開納博特機器人虛擬示教器軟件,并與IOA進行連接
打開納博特虛擬示教器軟件nabote--Inexbot Teaching Studio--Qt-tp-02。

在操作員初將當前用戶改為管理員,密碼123456。

在設置-系統設置-ip設置里查看ip地址,在IOA控制器里進行連接,IP地址為197.168.1.13,端口7000。

******
## **3、納博特示教器軟件更改機器人型號配置**
### (1)更改納博特機器人型號
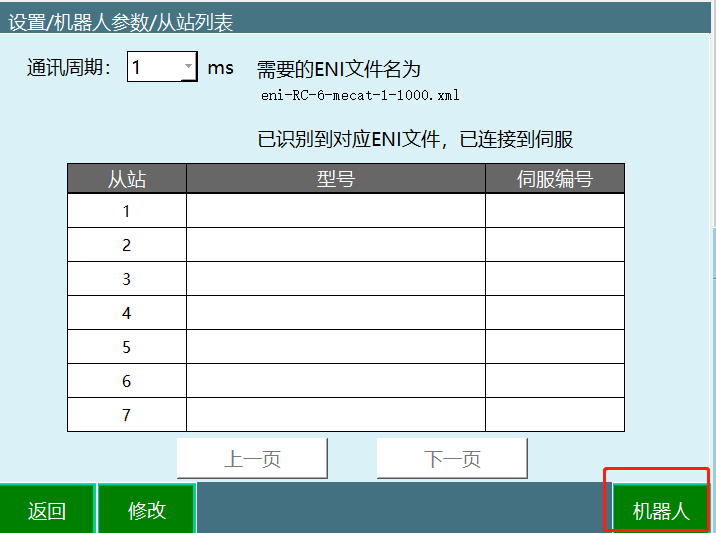
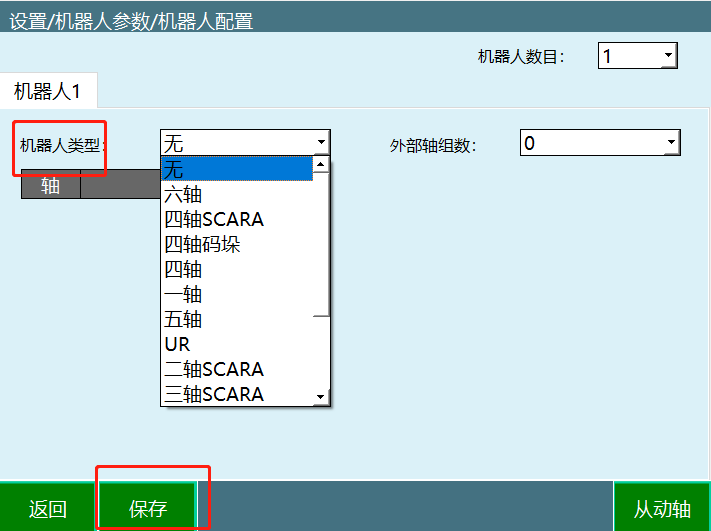
在納博特示教器界面點擊設置-機器人參數-從站配置,然后點擊機器人-修改,在機器人類型里選擇要更改的機器人型號(以六軸機器人為例),保存。

### (2)機器人參數設置
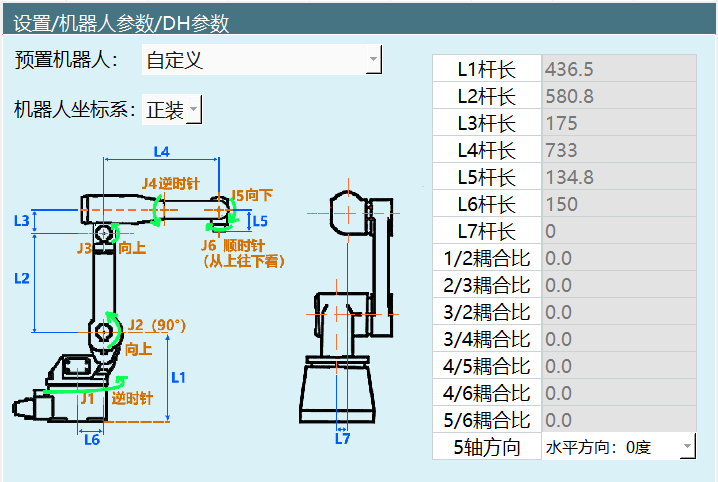
在納博特示教器界面點擊設置-機器人參數-DH參數,依據機器人型號的DH參數值進行修改。
點擊設置-機器人參數-關節參數,修改J1-J6六個軸的正反限位范圍,同時修改六個軸的額定正轉速,使額定正轉速略大于下面的機器人關節點動速度。

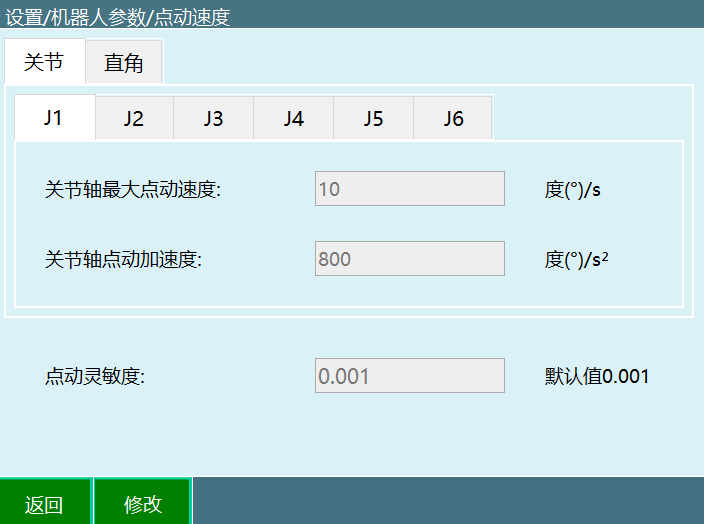
點擊設置-機器人參數-點動速度-關節,這只關節軸最大點動速度,使之略小于上文的額定正轉速。
至此,納博特示教器里機器人型號配置更改已完成。
- 歡迎使用IOA數字孿生
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- (二)、三維場景搭建
- 3D設計視頻教程
- 坐標及旋轉
- 模型參數設置
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- 虛擬電氣信號歸類
- 虛擬接線與導出
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 西門子實體PLCS7-1214控制器的添加與控制
- 西門子虛擬PLCS7-1214控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- Py-teach快速編程仿真
- 人工智能視覺仿真
- 單片機接入與仿真控制
- Mixly-UNO_S虛擬工廠SDK
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- 樹莓派與Python仿真
- (四)、自定義控制器添加
- modbus-tcp自定義控制器
- (五)、Py-teach模塊化編程示教
- Py-teach軟件使用
- 語法與編程
- py-teach快速編程在線教程
- (六)、SDK與二次開發
- modbus-tcp自定義控制器SDK
- 機器視覺開發SDK
- EAIDK-610固件燒錄手冊
- EAIDK-610快速上手手冊
- EAIDK-610案例使用手冊
- (七)、快速上手案例教程
- 西門子PLC虛實仿真公開課
- 納博特工業機器人虛實仿真
- 三菱PLC虛實仿真
- (八)、XR多人互動
- (九)、問題歸總
- (十)、IOA硬件虛實仿真導航
- IOA虛實控制器及案例下載
- 虛實控制器資源包
- 機器視覺與人工智能