
# 樹莓派與Python仿真
*更新時間:2022年1月15日*
python 驅動程序可從 本章附錄 IOA_Driver 中查看
## 軟件需求
>* IOA數字仿真引擎軟件(Windows端)
>* Python(樹莓派端)
## 工作原理
>IOA虛擬仿真引擎將場景內虛擬相機實時捕獲的圖像信息利用tcp協議發送出去,python程序接收該信息后對圖像進行處理,得到處理結果后利用tcp協議控制場景內虛擬控制器
## 軟件安裝
>* 在樹莓派端打開一個新的終端,并輸入
```
sudo apt install python3
```
## 測試工程——視覺
> 測試工程可此鏈接獲取(*link*)
> 1. 打開IOA軟件
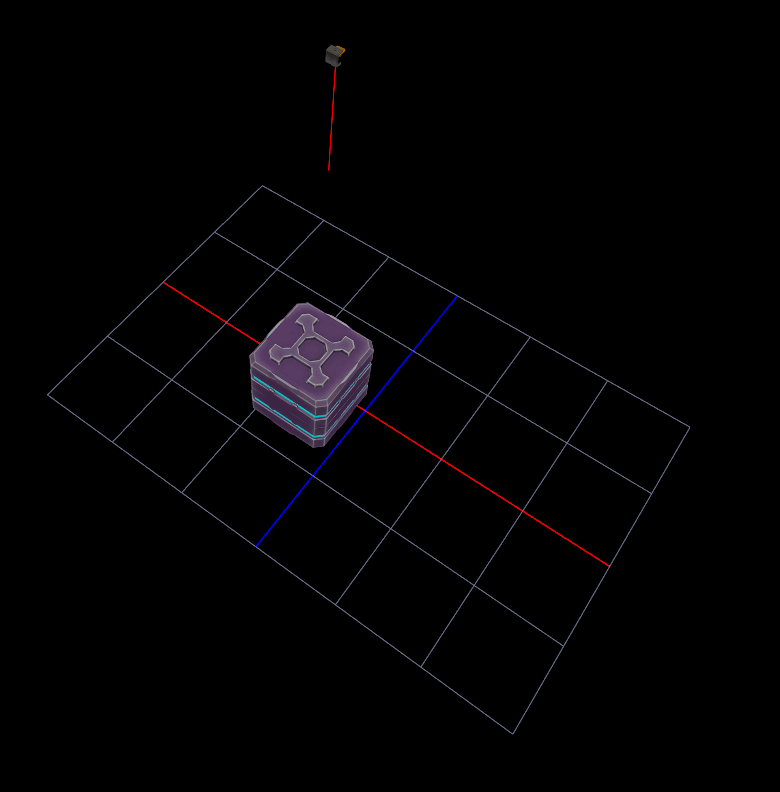
> 2. 從素材庫中拖出一個**視覺相機**
> 3. 從素材庫中拖出一個**矮紫色塊**(也可以是其他物體,用于檢測視覺相機是否能看到圖像)
> 4. 將兩個物體移動至合適位置,使視覺相機能夠看到目標物體
> 
> 5. 在樹莓派端打開python文件,并修改IP地址為PC端IP地址
>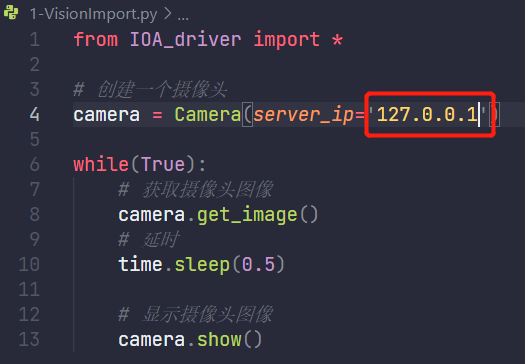
> 6. 在文件所處目錄下打開終端并運行即可看到攝像頭捕捉的結果
```
python3 filename.py
```
> 
```
注意:在獲取img后,可以使用Opencv、numpy等多種api對圖像進行處理,也可以利用tensorflow、pytorch等深度學習推理框架對該圖片進行深度學習推理
```
## 測試工程——虛擬控制器
> 測試工程可此鏈接獲取(*link*)
> 1. 打開IOA軟件
> 2. 點擊**控制器**, **添加**, 控制器類別選擇**自定義控制器**,點擊**確定**
> 
> 3. 修改紅色框位置IP地址為樹莓派IP地址,端口為5478
> 4. 在樹莓派端打開代碼,修改紅色框位置IP地址為樹莓派端IP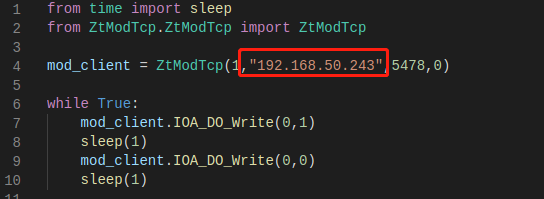
> 5. 在樹莓派端運行該程序,在IOA軟件內**控制器**界面點擊**連接**
> 6. 在場景內拖出一個LED燈,并將其配線至自定義控制器DO00管腳,可看到LED燈閃爍
- 歡迎使用IOA數字孿生
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- (二)、三維場景搭建
- 3D設計視頻教程
- 坐標及旋轉
- 模型參數設置
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- 虛擬電氣信號歸類
- 虛擬接線與導出
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 西門子實體PLCS7-1214控制器的添加與控制
- 西門子虛擬PLCS7-1214控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- Py-teach快速編程仿真
- 人工智能視覺仿真
- 單片機接入與仿真控制
- Mixly-UNO_S虛擬工廠SDK
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- 樹莓派與Python仿真
- (四)、自定義控制器添加
- modbus-tcp自定義控制器
- (五)、Py-teach模塊化編程示教
- Py-teach軟件使用
- 語法與編程
- py-teach快速編程在線教程
- (六)、SDK與二次開發
- modbus-tcp自定義控制器SDK
- 機器視覺開發SDK
- EAIDK-610固件燒錄手冊
- EAIDK-610快速上手手冊
- EAIDK-610案例使用手冊
- (七)、快速上手案例教程
- 西門子PLC虛實仿真公開課
- 納博特工業機器人虛實仿真
- 三菱PLC虛實仿真
- (八)、XR多人互動
- (九)、問題歸總
- (十)、IOA硬件虛實仿真導航
- IOA虛實控制器及案例下載
- 虛實控制器資源包
- 機器視覺與人工智能