
[TOC]
## **1、軟件及工程下載**
## **教程視頻**
<iframe src="//player.bilibili.com/player.html?aid=937530818&bvid=BV1nT4y1i7Fc&cid=556688859&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true" width="670px" height="442px" > </iframe>
>AUBO控制器軟件下載地址[鏈接](https://pan.baidu.com/s/1VBMlFKagURl2TlsuhRXkIg) 提取碼:3937
>AUBO虛擬機軟件下載地址[鏈接](https://pan.baidu.com/s/1IMxewbIySBOi87x7IeTXzw) 提取碼:2bkg
******
## 2、**虛擬機安裝說明**
1、確保軟件安裝包,已經成功下載到電腦上,選擇,進行安裝。
2、在首個安裝界面,直接點下一步,勾選接受協議,再點下一步。
3、用戶可以按需修改軟件安裝位置,勾選“增強型鍵盤驅動程序”,點擊下一步。
4、取消勾選“啟動時檢查產品更新”和“加入客戶體驗提升計劃”,再點下一步。
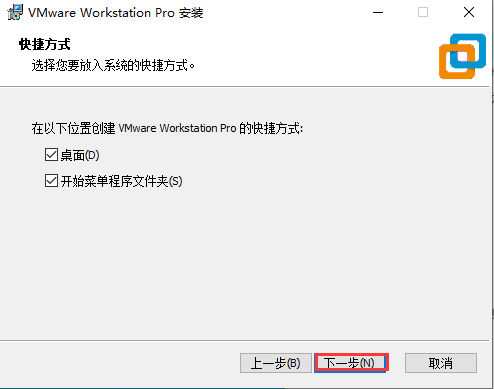
5、在快捷方式界面,直接點下一步,最后選擇底部的“安裝”即可。
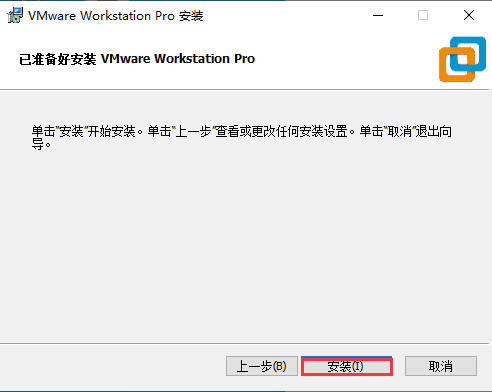
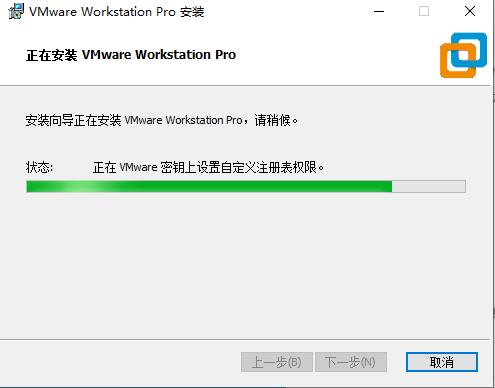
6、VMware Workstation 軟件會自動開始安裝,并顯示安裝進度。
7、安裝完成后,打開虛擬機再打開VM序列號,選擇其中一個填入即可正常使用。

## 3、**軟件模擬仿真**
虛擬機開啟步驟說明點擊[鏈接](https://www.bilibili.com/video/BV1Bh411e7Ci/)
AUBO連接IOA步驟說明點擊[鏈接](https://www.bilibili.com/video/BV1HU4y157ND/)
**1、** **說明**
1. 傲博需要控制器需要用到Linux系統,所有我們創建一個虛擬機來對傲博機器人進行示教控制
2. 控制器的IP地址要和網絡連接中虛擬機創建的網絡IP地址處于同一個網端
**2、** **如何使用**
1. 打開虛擬機之后點擊進入控制臺,輸入指令 “**ifconfig**”可以查看到控制器的ip地址如下圖

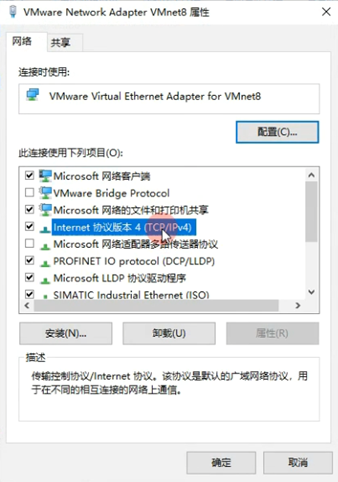
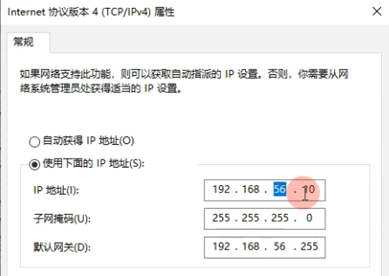
2. 之后打開網卡查看由虛擬機創建的網卡的ip地址確認二者是否處于同一網端
3. 右鍵點擊屬性打開Internet協議版本4(TCP/IPV4)查看虛擬機網卡地址
4. 確認地址一致后進入傲博控制器密碼為1,輸入后即可進入
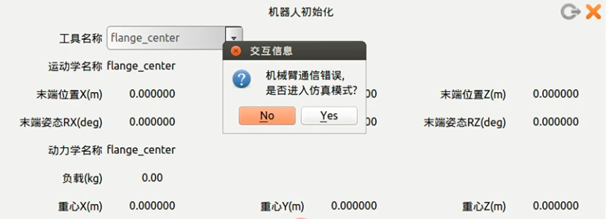
5. 進入選擇保存后會出現一個彈窗直接點擊Yes進入仿真模式
6. 進入IOA打開左上角的模型庫選擇分類中的機器人以拖拽的方式將一個傲博機器人放置到場景中

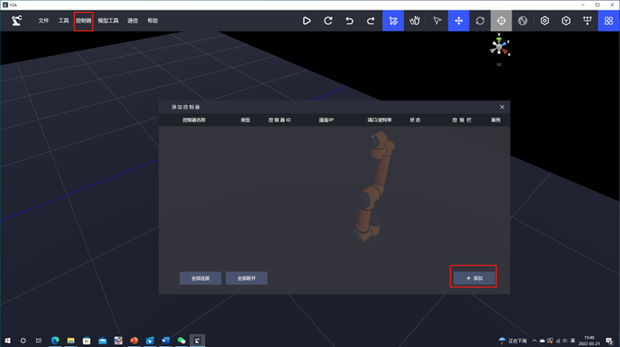
7. 添加控制器中控制器類別選擇工業機器人,型號為AUBO_R6

8. IOA中控制器的ip地址為傲博控制器的ip地址,端口號為502

9. 配置虛擬電氣接線第一步先打開顯示控制,第二步點擊左側長方塊進入虛擬接線頁面第三步以拖拽的方式將R6機械臂接口接入模擬控制中
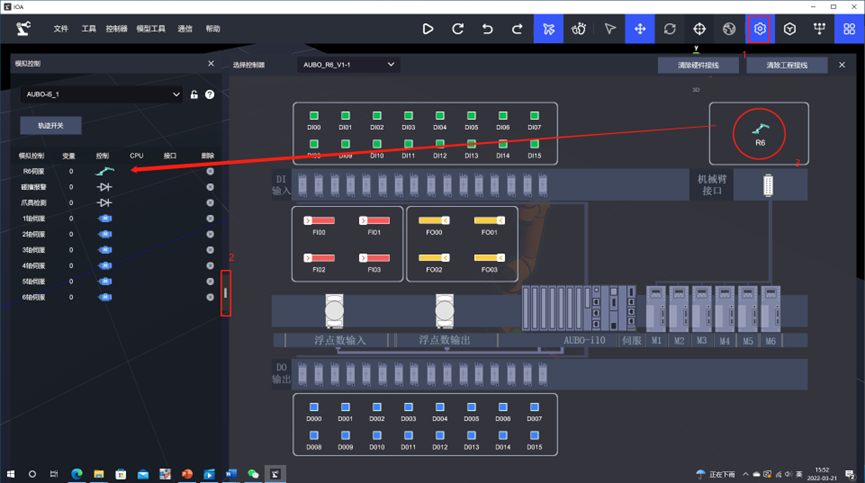
10. 完成上述步驟后即可通過虛擬機中的傲博控制器來控制IOA場景中的機器人
- 歡迎使用IOA數字孿生
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- (二)、三維場景搭建
- 3D設計視頻教程
- 坐標及旋轉
- 模型參數設置
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- 虛擬電氣信號歸類
- 虛擬接線與導出
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 西門子實體PLCS7-1214控制器的添加與控制
- 西門子虛擬PLCS7-1214控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- Py-teach快速編程仿真
- 人工智能視覺仿真
- 單片機接入與仿真控制
- Mixly-UNO_S虛擬工廠SDK
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- 樹莓派與Python仿真
- (四)、自定義控制器添加
- modbus-tcp自定義控制器
- (五)、Py-teach模塊化編程示教
- Py-teach軟件使用
- 語法與編程
- py-teach快速編程在線教程
- (六)、SDK與二次開發
- modbus-tcp自定義控制器SDK
- 機器視覺開發SDK
- EAIDK-610固件燒錄手冊
- EAIDK-610快速上手手冊
- EAIDK-610案例使用手冊
- (七)、快速上手案例教程
- 西門子PLC虛實仿真公開課
- 納博特工業機器人虛實仿真
- 三菱PLC虛實仿真
- (八)、XR多人互動
- (九)、問題歸總
- (十)、IOA硬件虛實仿真導航
- IOA虛實控制器及案例下載
- 虛實控制器資源包
- 機器視覺與人工智能