
**## 1、軟件及工程下載**
## **虛擬控制器教程視頻**
<iframe src="//player.bilibili.com/player.html?aid=595121941&bvid=BV1Hq4y1Y7rC&cid=556707498&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"width="670px" height="442px" > </iframe>
## **實體控制器教程視頻**
<iframe src="//player.bilibili.com/player.html?aid=552536718&bvid=BV1Yi4y1k7Ht&cid=556710495&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"width="670px" height="442px" > </iframe>
ZDevelop是Zmoiton系列運動控制器的PC端程序開發調試軟件,通過它用戶能夠很容易的對控制器進行配置,快速開發應用程序以及對運動控制器正在運行的程序進行實時調試。
>**ZDevelop軟件:**[鏈接](http://www.zmotion.com.cn/pro_info_68.html)
>**ZDevelop使用手冊:**[鏈接](http://www.zmotion.com.cn/upload/ZDevelop%E4%BD%BF%E7%94%A8%E6%89%8B%E5%86%8CV3.00.01.pdf)
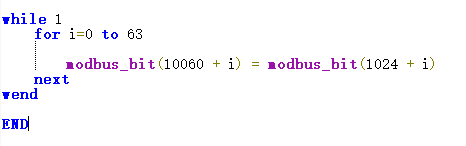
IOA支持虛擬的ZMC308BE以及真實的ZMC308BE接入,需要注意的是,IOA之中已經建立的1對1的ZMC物理信號以及虛擬寄存器關系,需在正運動編程時添加映射程序:
*****
</div><div><br></div><div><br>
## 2、軟件模擬仿真
> **IOA連接正運動虛擬控制器教程:**[視頻](//player.bilibili.com/player.html?bvid=BV1Gv4y1f7SN&page=1)
步驟如下:
### IOA添加ZMC308控制器
打開IOA虛擬工廠,點擊系統菜單欄中的“**控制器**”,在彈出的“**添加控制器**”界面點擊“**+添加**”按鈕。
控制器類別選擇“**運動控制器**”,控制器型號為“**ZMC308_V1**”,點擊“**確定**”。

在IOA虛擬工廠場景中放置一條PV大皮帶以及一個切換開關。

選中皮帶線,點擊菜單欄“**顯示控制**”按鈕,將顯示PV大皮帶的“**模擬控制**”界面,點擊界面右側的**彈出按鈕**,將ZMC308_V1-1的輸出點DO00拖拽到PV大皮帶的使能開關處。

同樣的將ZMC308_V1-1的輸入點DI60拖拽到切換開關的控制開關處。
***
### 程序下載
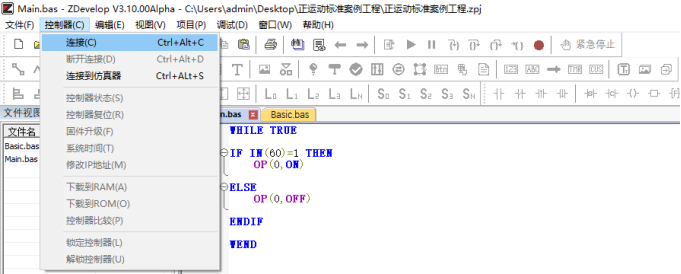
打開zdevelop快捷方式,點擊菜單欄“**文件**”中的“**打開項目**”;選擇需要打開的項目文件(以.zpj結尾)。項目中的Basic文件中對軸的類型、速度等進行了設置,對正運動控制器與IOA之間DI,DO以及模擬量的modbus通訊地址對應。


在文件Main中編寫的DI60控制DO00程序,如下圖所示:

確認程序編寫無誤后,點擊菜單欄“**控制器**”中的“**連接到仿真器**”。

上述步驟執行完后系統會自動創建并彈出仿真器窗口,如下圖所示。

點擊ZDevelop菜單欄“**下載到 ROM**”圖標將程序下載至仿真器。

下方窗口顯示“Down to Controller Rom Success”表示程序下載成功,如下圖所示。
***
### 程序運行
在IOA虛擬工廠中點擊左上角菜單欄中的“**控制器**”,確認ZMC308_V1的IP地址為12.7.0.0.1,端口號為502,點擊“**連接**”,完成IOA與正運動仿真器的連接。
然后點擊菜單欄“**開始**”按鈕。打開切換開關,則皮帶線運轉,關閉切換開關,則皮帶線停止。完成了ZMC308虛擬控制器對IOA場景的控制。
可在ZDevelop軟件中查看輸入輸出信號,點擊菜單欄“**視圖**”中的“**輸入口**”以及“**輸出口**”。

即可查看當前輸入輸出情況。
當IOA場景添加軸對象時,完成接線后,點擊ZDevelop菜單欄“**視圖**”中的“**手動運動**”,在彈出的“**手動運動**”界面可手動控制軸運動。
***
</div><div><br></div><div><br>
## 3、硬件模擬仿真
> **IOA連接正運動實體控制器教程:**[視頻](//player.bilibili.com/player.html?bvid=BV1ZT4y1A7G5&page=1)
***
若使用硬件控制,同樣的在IOA虛擬工廠中添加ZMC308_V1運動控制器。配置場景及接線。
### 程序下載
將ZMC308正運動控制箱電源接口使用品字型插頭連接到220V電源上,并按下船型開關接通控制箱的電源:使用RJ45水晶頭通訊電纜將控制箱與PC端網口進行連接(網絡正常網口會出現綠燈閃爍);將正運動示教器電纜上的航插連接到控制箱的示教器接口上。
點擊菜單欄“文件”中的“打開項目”,將ZMC308運動控制器工程打開,并在Main文件中編寫控制程序。程序編寫完成后,點擊菜單欄“控制器”中的“連接”按鈕。
彈出“連接到控制器”窗口中,將IP改為控制器IP地址(出廠IP:192.168.0.11,需要確認電腦IP和控制器IP在同一網段),并點擊連接。若不知道控制器IP,可以采用 IP 掃描來查看。

控制器連接完成后,點擊菜單欄按鈕“下載到 RAM”,下方窗口顯示“Down to Controller Rom Success”表示程序下載成功。
下載成功命令和輸出。

***
IOA虛擬工廠控制器的通道IP為實體控制器的192.168.0.11,連接完成之后,即可通過實體控制器編程控制虛擬工廠中模型運動。
*****
</div><div><br>
**編程方式**
ZDevelop支持三種編程方式,分別為 Basic、PLC 梯形圖、HMI 組態。
>①**ZMotion Basic 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/%E6%AD%A3%E8%BF%90%E5%8A%A8%E6%8A%80%E6%9C%AF-%E3%80%8AZBasic%E7%BC%96%E7%A8%8B%E6%89%8B%E5%86%8CV3.2.5%E3%80%8B.pdf)
②**ZMotion PLC 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/%E6%AD%A3%E8%BF%90%E5%8A%A8%E6%8A%80%E6%9C%AF-%E3%80%8AZMotion%20PLC%E7%BC%96%E7%A8%8B%E6%89%8B%E5%86%8CV2.0.0%E3%80%8B.pdf)
③**ZMotion Hmi 編程手冊:**[鏈接](http://www.zmotion.com.cn/upload/ZHmi%E6%89%8B%E5%
- 歡迎使用IOA數字孿生
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- (二)、三維場景搭建
- 3D設計視頻教程
- 坐標及旋轉
- 模型參數設置
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- 虛擬電氣信號歸類
- 虛擬接線與導出
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 西門子實體PLCS7-1214控制器的添加與控制
- 西門子虛擬PLCS7-1214控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- Py-teach快速編程仿真
- 人工智能視覺仿真
- 單片機接入與仿真控制
- Mixly-UNO_S虛擬工廠SDK
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- 樹莓派與Python仿真
- (四)、自定義控制器添加
- modbus-tcp自定義控制器
- (五)、Py-teach模塊化編程示教
- Py-teach軟件使用
- 語法與編程
- py-teach快速編程在線教程
- (六)、SDK與二次開發
- modbus-tcp自定義控制器SDK
- 機器視覺開發SDK
- EAIDK-610固件燒錄手冊
- EAIDK-610快速上手手冊
- EAIDK-610案例使用手冊
- (七)、快速上手案例教程
- 西門子PLC虛實仿真公開課
- 納博特工業機器人虛實仿真
- 三菱PLC虛實仿真
- (八)、XR多人互動
- (九)、問題歸總
- (十)、IOA硬件虛實仿真導航
- IOA虛實控制器及案例下載
- 虛實控制器資源包
- 機器視覺與人工智能