
# 12 -- Neural Network
上節課我們主要介紹了Gradient Boosted Decision Tree。GBDT通過使用functional gradient的方法得到一棵一棵不同的樹,然后再使用steepest descent的方式給予每棵樹不同的權重,最后可以用來處理任何而定error measure。上節課介紹的GBDT是以regression為例進行介紹的,使用的是squared error measure。本節課講介紹一種出現時間較早,但當下又非常火的一種機器算法模型,就是神經網絡(Neural Network)。
### **Motivation**
在之前的機器學習基石課程中,我們就接觸過Perceptron模型了,例如PLA算法。Perceptron就是在矩外面加上一個sign函數,取值為{-1,+1}。現在,如果把許多perceptrons線性組合起來,得到的模型G就如下圖所示:
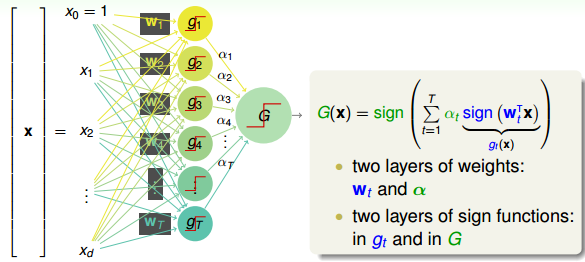
將左邊的輸入與T個不同的權重相乘(每個是d+1維的),得到T個不同的perceptrons為。最后,每個給予不同的權重,線性組合得到G。G也是一個perceptron模型。
從結構上來說,上面這個模型包含了兩層的權重,分別是和。同時也包含了兩層的sign函數,分別是和G。那么這樣一個由許多感知機linear aggregation的模型能實現什么樣的boundary呢?
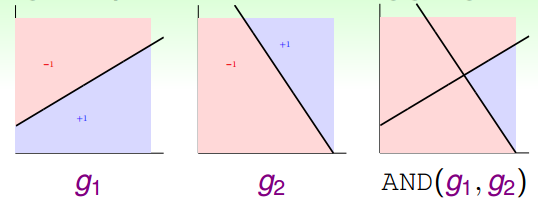
舉個簡單的例子,如下圖所示,和分別是平面上兩個perceptrons。其中,紅色表示-1,藍色表示+1。這兩個perceptrons線性組合可能得到下圖右側的模型,這表示的是和進行與(AND)的操作,藍色區域表示+1。
如何通過感知機模型來實現上述的邏輯操作呢?一種方法是令第二層中的。這樣,G(x)就可表示為:

和的取值是{-1,+1},當時,G(x)=0;當時,G(x)=0;當時,G(x)=0;當時,G(x)=1。感知機模型如下所示:
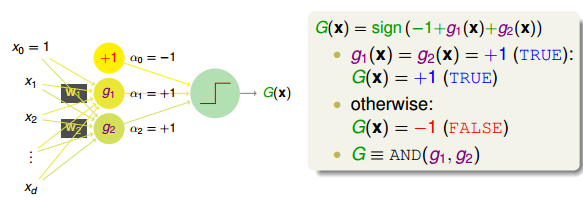
這個例子說明了一些簡單的線性邊界,如上面的和,在經過一層感知機模型,經線性組合后,可以得到一些非線性的復雜邊界(AND運算)G(x)。
除此之外,或(OR)運算和非(NOT)運算都可以由感知機建立相應的模型,非常簡單。
所以說,linear aggregation of perceptrons實際上是非常powerful的模型同時也是非常complicated模型。再看下面一個例子,如果二維平面上有個圓形區域,圓內表示+1,圓外表示-1。這樣復雜的圓形邊界是沒有辦法使用單一perceptron來解決的。如果使用8個perceptrons,用剛才的方法線性組合起來,能夠得到一個很接近圓形的邊界(八邊形)。如果使用16個perceptrons,那么得到的邊界更接近圓形(十六邊形)。因此,使用的perceptrons越多,就能得到各種任意的convex set,即凸多邊形邊界。之前我們在機器學習基石中介紹過,convex set的VC Dimension趨向于無窮大()。這表示只要perceptrons夠多,我們能得到任意可能的情況,可能的模型。但是,這樣的壞處是模型復雜度可能會變得很大,從而造成過擬合(overfitting)。
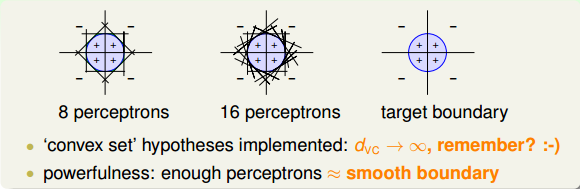
總的來說,足夠數目的perceptrons線性組合能夠得到比較平滑的邊界和穩定的模型,這也是aggregation的特點之一。
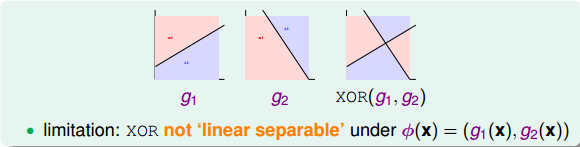
但是,也有單層perceptrons線性組合做不到的事情。例如剛才我們將的AND、OR、NOT三種邏輯運算都可以由單層perceptrons做到,而如果是異或(XOR)操作,就沒有辦法只用單層perceptrons實現。這是因為XOR得到的是非線性可分的區域,如下圖所示,沒有辦法由和線性組合實現。所以說linear aggregation of perceptrons模型的復雜度還是有限制的。
那么,為了實現XOR操作,可以使用多層perceptrons,也就是說一次transform不行,我們就用多層的transform,這其實就是Basic Neural Network的基本原型。下面我們就嘗試使用兩層perceptrons來實現XOR的操作。
首先,根據布爾運算,異或XOR操作可以拆分成:

這種拆分實際上就包含了兩層transform。第一層僅有AND操作,第二層是OR操作。這種兩層的感知機模型如下所示:
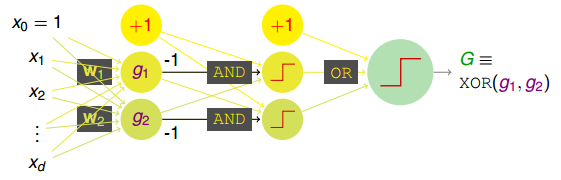
這樣,從AND操作到XOR操作,從簡單的aggregation of perceptrons到multi-layer perceptrons,感知機層數在增加,模型的復雜度也在增加,使最后得到的G能更容易解決一些非線性的復雜問題。這就是基本神經網絡的基本模型。
順便提一下,這里所說的感知機模型實際上就是在模仿人類的神經元模型(這就是Neural Network名稱的由來)。感知機模型每個節點的輸入就對應神經元的樹突dendrite,感知機每個節點的輸出就對應神經元的軸突axon。
### **Neural Network Hypothesis**
上一部分我們介紹的這種感知機模型其實就是Neural Network。輸入部分經過一層一層的運算,相當于一層一層的transform,最后通過最后一層的權重,得到一個分數score。即在OUTPUT層,輸出的就是一個線性模型。得到s后,下一步再進行處理。
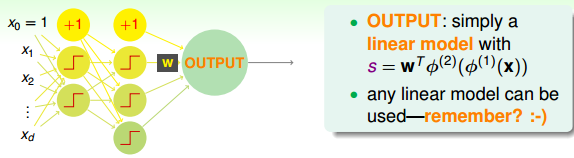
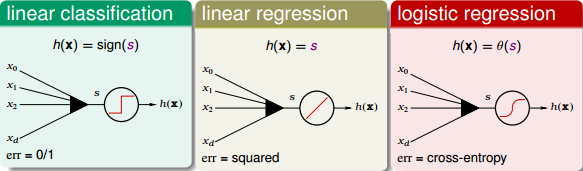
我們之前已經介紹過三種線性模型:linear classification,linear regression,logistic regression。那么,對于OUTPUT層的分數s,根據具體問題,可以選擇最合適的線性模型。如果是binary classification問題,可以選擇linear classification模型;如果是linear regression問題,可以選擇linear regression模型;如果是soft classification問題,則可以選擇logistic regression模型。本節課接下來將以linear regression為例,選擇squared error來進行衡量。
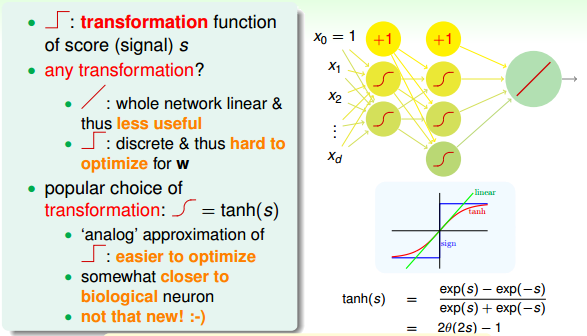
上面講的是OUTPUT層,對于中間層,每個節點對應一個perceptron,都有一個transform運算。上文我們已經介紹過的transformation function是階梯函數sign()。那除了sign()函數外,有沒有其他的transformation function呢?
如果每個節點的transformation function都是線性運算(跟OUTPUT端一樣),那么由每個節點的線性模型組合成的神經網絡模型也必然是線性的。這跟直接使用一個線性模型在效果上并沒有什么差異,模型能力不強,反而花費了更多不必要的力氣。所以一般來說,中間節點不會選擇線性模型。
如果每個節點的transformation function都是階梯函數(即sign()函數)。這是一個非線性模型,但是由于階梯函數是離散的,并不是處處可導,所以在優化計算時比較難處理。所以,一般也不選擇階梯函數作為transformation function。
既然線性函數和階梯函數都不太適合作為transformation function,那么最常用的一種transformation function就是tanh(s),其表達式如下:

tanh(s)函數是一個平滑函數,類似“s”型。當|s|比較大的時候,tanh(s)與階梯函數相近;當|s|比較小的時候,tanh(s)與線性函數比較接近。從數學上來說,由于處處連續可導,便于最優化計算。而且形狀上類似階梯函數,具有非線性的性質,可以得到比較復雜強大的模型。
順便提一下,tanh(x)函數與sigmoid函數存在下列關系:

其中,
那么,接下來我們就使用tanh函數作為神經網絡中間層的transformation function,所有的數學推導也基于此。實際應用中,可以選擇其它的transformation function,不同的transformation function,則有不同的推導過程。
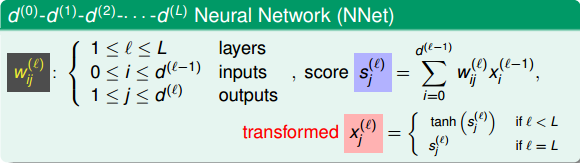
下面我們將仔細來看看Neural Network Hypothesis的結構。如下圖所示,該神經網絡左邊是輸入層,中間兩層是隱藏層,右邊是輸出層。整體上來說,我們設定輸入層為第0層,然后往右分別是第一層、第二層,輸出層即為第3層。
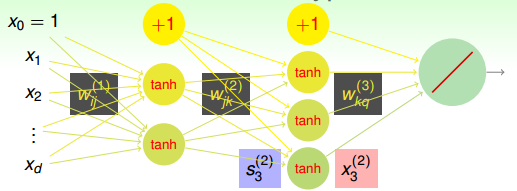
Neural Network Hypothesis中,分別表示神經網絡的第幾層,其中L為總層數。例如上圖所示的是3層神經網絡,L=3。我們先來看看每一層的權重,上標l滿足,表示是位于哪一層。下標i滿足,表示前一層輸出的個數加上bias項(常數項)。下標j滿足,表示該層節點的個數(不包括bias項)。
對于每層的分數score,它的表達式為:
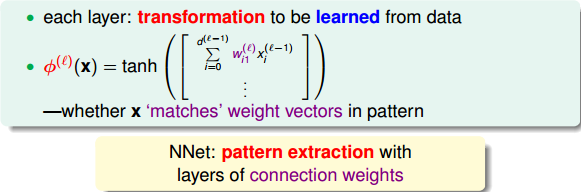
對于每層的transformation function,它的表達式為:
因為是regression模型,所以在輸出層(l=L)直接得到。
介紹完Neural Network Hypothesis的結構之后,我們來研究下這種算法結構到底有什么實際的物理意義。還是看上面的神經網絡結構圖,每一層輸入到輸出的運算過程,實際上都是一種transformation,而轉換的關鍵在于每個權重值。每層網絡利用輸入x和權重w的乘積,在經過tanh函數,得到該層的輸出,從左到右,一層一層地進行。其中,很明顯,x和w的乘積越大,那么tanh(wx)就會越接近1,表明這種transformation效果越好。再想一下,w和x是兩個向量,乘積越大,表明兩個向量內積越大,越接近平行,則表明w和x有模式上的相似性。從而,更進一步說明了如果每一層的輸入向量x和權重向量w具有模式上的相似性,比較接近平行,那么transformation的效果就比較好,就能得到表現良好的神經網絡模型。也就是說,神經網絡訓練的核心就是pattern extraction,即從數據中找到數據本身蘊含的模式和規律。通過一層一層找到這些模式,找到與輸入向量x最契合的權重向量w,最后再由G輸出結果。
### **Neural Network Learning**
我們已經介紹了Neural Network Hypothesis的結構和算法流程。確定網絡結構其實就是確定各層的權重值。那如何根據已有的樣本數據,找到最佳的權重使error最小化呢?下面我們將詳細推導。

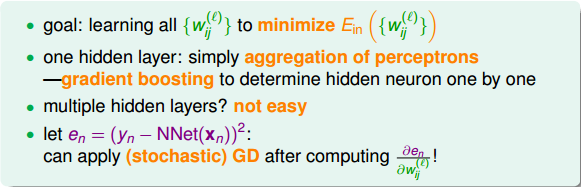
首先,我們的目標是找到最佳的讓最小化。如果只有一層隱藏層,就相當于是aggregation of perceptrons。可以使用我們上節課介紹的gradient boosting算法來一個一個確定隱藏層每個神經元的權重,輸入層到隱藏層的權重可以通過C&RT算法計算的到。這不是神經網絡常用的算法。如果隱藏層個數有兩個或者更多,那么aggregation of perceptrons的方法就行不通了。就要考慮使用其它方法。
根據error function的思想,從輸出層來看,我們可以得到每個樣本神經網絡預測值與實際值之間的squared error:,這是單個樣本點的error。那么,我們只要能建立與每個權重的函數關系,就可以利用GD或SGD算法對求偏微分,不斷迭代優化值,最終得到使最小時對應的。
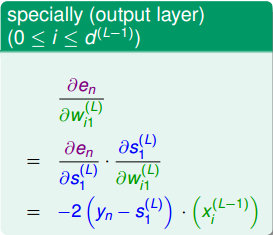
為了建立與各層權重的函數關系,求出對的偏導數,我們先來看輸出層如何計算。與的函數關系為:

計算對的偏導數,得到:
以上是輸出層求偏導的結果。如果是其它層,即,偏導計算可以寫成如下形式:
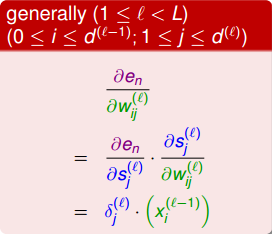
上述推導中,令與第l層第j個神經元的分數的偏導數記為。即:

當時,;當時,是未知的,下面我們將進行運算推導,看看不同層之間的是否有遞推關系。
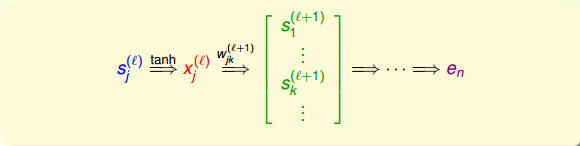
如上圖所示,第l層第j個神經元的分數經過tanh函數,得到該層輸出,再與下一層權重相乘,得到第l+1層的分數,直到最后的輸出層。
那么,利用上面到這樣的遞推關系,我們可以對偏導數做一些中間變量替換處理,得到如下表達式:
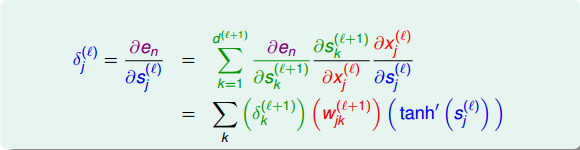
值得一提的是,上式中有個求和項,其中k表示下一層即l+1層神經元的個數。表明l層的與l+1層的所有都有關系。因為參與到每個的運算中了。
這樣,我們得到了與的遞推關系。也就是說如果知道了的值,就能推導出的值。而最后一層,即輸出層的,那么就能一層一層往前推導,得到每一層的,從而可以計算出對各個的偏導數。計算完偏微分之后,就可以使用GD或SGD算法進行權重的迭代優化,最終得到最優解。
神經網絡中,這種從后往前的推導方法稱為Backpropagation Algorithm,即我們常常聽到的BP神經網絡算法。它的算法流程如下所示:
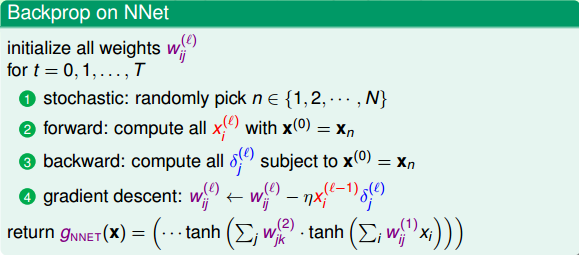
上面采用的是SGD的方法,即每次迭代更新時只取一個點,這種做法一般不夠穩定。所以通常會采用mini-batch的方法,即每次選取一些數據,例如,來進行訓練,最后求平均值更新權重w。這種做法的實際效果會比較好一些。
### **Optimization and Regularization**
經過以上的分析和推導,我們知道神經網絡優化的目標就是讓最小化。本節課我們采用error measure是squared error,當然也可以采用其它的錯誤衡量方式,只要在推導上做稍稍修改就可以了,此處不再贅述。

下面我們將主要分析神經網絡的優化問題。由于神經網絡由輸入層、多個隱藏層、輸出層構成,結構是比較復雜的非線性模型,因此可能有許多局部最小值,是non-convex的,找到全局最小值(globalminimum)就會困難許多。而我們使用GD或SGD算法得到的很可能就是局部最小值(local minimum)。
基于這個問題,不同的初始值權重通常會得到不同的local minimum。也就是說最終的輸出G與初始權重有很大的關系。在選取上有個技巧,就是通常選擇比較小的值,而且最好是隨機random選擇。這是因為,如果權重很大,那么根據tanh函數,得到的值會分布在兩側比較平緩的位置(類似于飽和saturation),這時候梯度很小,每次迭代權重可能只有微弱的變化,很難在全局上快速得到最優解。而隨機選擇的原因是通常對權重如何選擇沒有先驗經驗,只能通過random,從普遍概率上選擇初始值,隨機性避免了人為因素的干預,可以說更有可能經過迭代優化得到全局最優解。
下面從理論上看一下神經網絡模型的VC Dimension。對于tanh這樣的transfer function,其對應的整個模型的復雜度。其中V是神經網絡中神經元的個數(不包括bias點),D表示所有權值的數量。所以,如果V足夠大的時候,VC Dimension也會非常大,這樣神經網絡可以訓練出非常復雜的模型。但同時也可能會造成過擬合overfitting。所以,神經網絡中神經元的數量V不能太大。
為了防止神經網絡過擬合,一個常用的方法就是使用regularization。之前我們就介紹過可以在error function中加入一個regularizer,例如熟悉的L2 regularizer :
但是,使用L2 regularizer 有一個缺點,就是它使每個權重進行等比例縮小(shrink)。也就是說大的權重縮小程度較大,小的權重縮小程度較小。這會帶來一個問題,就是等比例縮小很難得到值為零的權重。而我們恰恰希望某些權重,即權重的解是松散(sparse)的。因為這樣能有效減少VC Dimension,從而減小模型復雜度,防止過擬合發生。
那么為了得到sparse解,有什么方法呢?我們之前就介紹過可以使用L1 regularizer:,但是這種做法存在一個缺點,就是包含絕對值不容易微分。除此之外,另外一種比較常用的方法就是使用weight-elimination regularizer。weight-elimination regularizer類似于L2 regularizer,只不過是在L2 regularizer上做了尺度的縮小,這樣能使large weight和small weight都能得到同等程度的縮小,從而讓更多權重最終為零。weight-elimination regularizer的表達式如下:
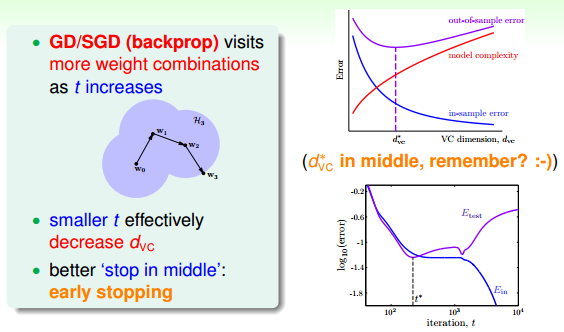
除了weight-elimination regularizer之外,還有另外一個很有效的regularization的方法,就是Early Stopping。簡而言之,就是神經網絡訓練的次數t不能太多。因為,t太大的時候,相當于給模型尋找最優值更多的可能性,模型更復雜,VC Dimension增大,可能會overfitting。而t不太大時,能有效減少VC Dimension,降低模型復雜度,從而起到regularization的效果。和隨訓練次數t的關系如下圖右下角所示:
那么,如何選擇最佳的訓練次數t呢?可以使用validation進行驗證選擇。
### **總結**
本節課主要介紹了Neural Network模型。首先,我們通過使用一層甚至多層的perceptrons來獲得更復雜的非線性模型。神經網絡的每個神經元都相當于一個Neural Network Hypothesis,訓練的本質就是在每一層網絡上進行pattern extraction,找到最合適的權重,最終得到最佳的G。本課程以regression模型為例,最終的G是線性模型,而中間各層均采用tanh函數作為transform function。計算權重的方法就是采用GD或者SGD,通過Backpropagation算法,不斷更新優化權重值,最終使得最小化,即完成了整個神經網絡的訓練過程。最后,我們提到了神經網絡的可以使用一些regularization來防止模型過擬合。這些方法包括隨機選擇較小的權重初始值,使用weight-elimination regularizer或者early stopping等。
**_注明:_**
文章中所有的圖片均來自臺灣大學林軒田《機器學習技法》課程
- 臺灣大學林軒田機器學習筆記
- 機器學習基石
- 1 -- The Learning Problem
- 2 -- Learning to Answer Yes/No
- 3 -- Types of Learning
- 4 -- Feasibility of Learning
- 5 -- Training versus Testing
- 6 -- Theory of Generalization
- 7 -- The VC Dimension
- 8 -- Noise and Error
- 9 -- Linear Regression
- 10 -- Logistic Regression
- 11 -- Linear Models for Classification
- 12 -- Nonlinear Transformation
- 13 -- Hazard of Overfitting
- 14 -- Regularization
- 15 -- Validation
- 16 -- Three Learning Principles
- 機器學習技法
- 1 -- Linear Support Vector Machine
- 2 -- Dual Support Vector Machine
- 3 -- Kernel Support Vector Machine
- 4 -- Soft-Margin Support Vector Machine
- 5 -- Kernel Logistic Regression
- 6 -- Support Vector Regression
- 7 -- Blending and Bagging
- 8 -- Adaptive Boosting
- 9 -- Decision Tree
- 10 -- Random Forest
- 11 -- Gradient Boosted Decision Tree
- 12 -- Neural Network
- 13 -- Deep Learning
- 14 -- Radial Basis Function Network
- 15 -- Matrix Factorization
- 16(完結) -- Finale