
[TOC]
***********
## IOA平臺概述
:-: 
:-: [視頻播放](<//player.bilibili.com/player.html?bvid=BV16a4y1L7Fm&page=1"> ); [官網鏈接](http://www.ioaol.com/)
IOA-數字孿生仿真應用是一套綜合性的實訓平臺,該平臺通過采用數字化雙胞胎技術,將虛擬工廠的機電系統與真實的工業自動化控制系統打通,通過豐富的3D虛擬交互形式,從而實現對智慧工廠電氣配線、網絡配置、控制教學、組態編程實訓應用等目的。
虛擬數字式智慧工廠采用真實的西門子PLC系統,工業機器人運動控制器以及真實的數控系統,通過硬件模擬技術打通控制器與虛擬化的通信,即學生操作實訓采用真實的PLC編程控制,以及工業機器人編程應用,MES調度以及數控設備的實操,通過虛擬裝備的3D展示,達到與真實的智慧工廠同樣的實訓效果。
* 模擬:用戶自建工廠、虛擬工廠云工程平臺
* 仿真:虛擬電氣接線、CAD電氣接線
* 交互:多屏三維互動 + AR交互 + VR沉浸式體驗
* 內容:電氣CAD、PLC編程、機器人示教、組態控制
* 資源:虛擬工廠模型庫、高端智造虛實轉化
* 特點:以實控虛、以虛代實、虛實結合
## IOA虛實仿真功能概述
:-: 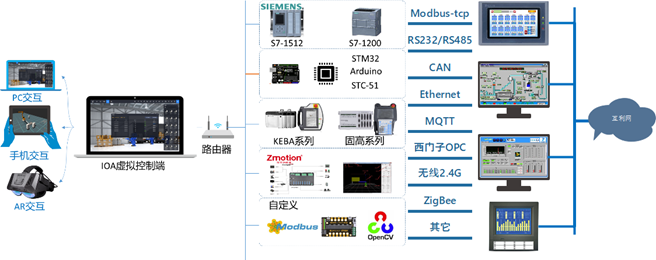
IOA虛擬仿真支持虛擬和真實的多種控制器實時仿真及混合仿真,通過虛實孿生技術,將虛擬工廠的機電系統與真實的工業自動化控制系統打通,以豐富的3D虛擬交互形式,從而實現對智慧工廠電氣配線、網絡配置、控制教學、組態編程實訓應用等目的。
| 序號 | 系列 | 控制系統 |真實控制器 |虛擬控制器 |
| --- | --- | --- |--- |--- |
| 1 | 機器人 | KEBA機器人 |支持 |支持 |
| 2 | 機器人 | 固高示教器 |支持 |無 |
| 3 | 機器人 | 納博特控制器 |支持 |支持 |
| 4 | 機器人 | 正運動控制器 |支持 |支持 |
| 5 | 機器人 | Python機器人 |無 |支持 |
| 6 | 機器人 | ABB機器人 |支持 |支持 |
| 7 | PLC系統 | 西門子S7-1200 |支持 |支持 |
| 8 | PLC系統 | 西門子S7-1500 |支持 |支持 |
| 9 | PLC系統 | 三菱PLC |支持 |支持 |
| 10 | 運動控制系統 | 正運動ZMC |支持 |支持 |
| 11 | 嵌入式單片機 | Arduino-UNO |支持 |支持 |
| 12 | 嵌入式單片機 | ESP32 |支持 |支持 |
| 13 | 二次開發 | Python |無 |支持 |
| 14 | 二次開發 | JAVA |無 |支持 |
| 15 | 二次開發 | LabVIEW |無 |支持 |
| 16 | 二次開發 | C# |無 |支持 |
| 17 | 機器視覺 | LabVIEW、Python |無 |支持 |
## IOA數字化全流程智能制造仿真
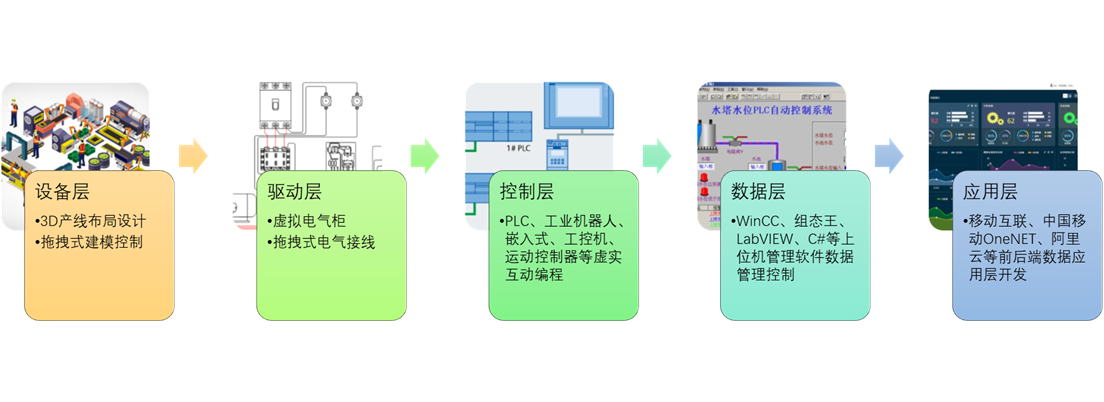
IOA內置豐富的3D模型庫、虛實孿生控制庫、以及物理信號邏輯,能夠按照智能工廠的設計流程,1:1的復現整個從設備層3D設計、驅動層電氣接線、控制層互動編程、數據層組態編程、再到應用層的網絡管理實現智慧工廠全流程設計與仿真的過程。
## IOA與傳統仿真軟件對比
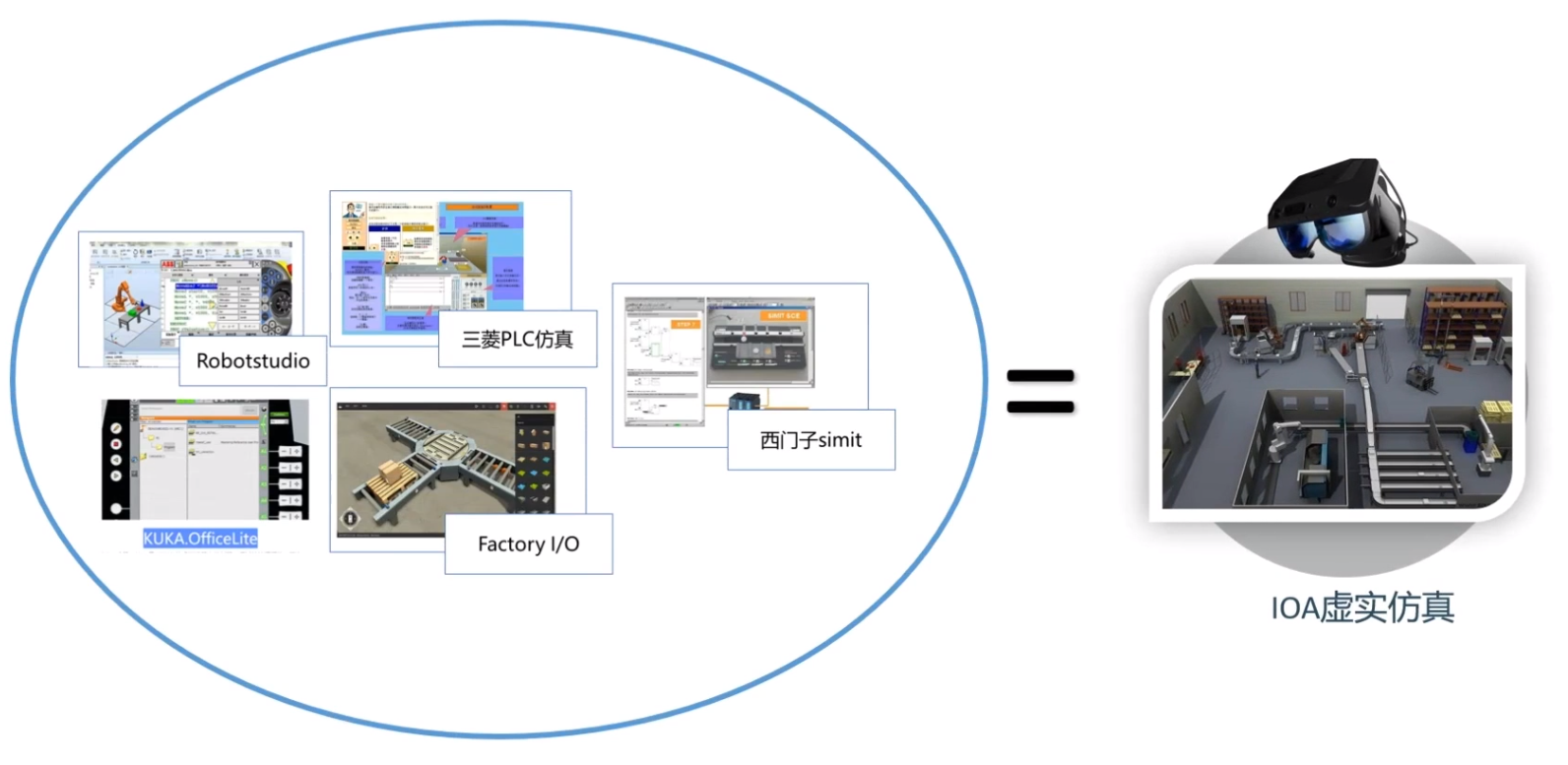
與傳統的離線機器人仿真、工業機器人仿真以及3D數字孿生軟件相比,IOA具有自由度高、配置豐富、簡單易用等特點,IOA即作為國內首套虛實互動混合仿真的智能控制3D軟件,能夠與幾乎市場上所有的控制器接入進行仿真,且具有非常高的易用性和靈活性。
>以ABB的Robotstudio為例,它雖然具有豐富的3D資源庫能夠進行互動仿真,但是只支持ABB的機器人仿真,不支持PLC和其它控制器接入,僅能夠作為機器人示教和離線仿真應用;
>以國外的Factory I/O為例,它雖然具有豐富的交互和3D體驗效果,但只是針對于PLC的編程邏輯控制,不支持工業機器人仿真和其它控制器接入,且適配過程繁瑣;
而,IOA具有更好的兼容性和易用性,與傳統的仿真軟件和真實的硬件設備對比具有非常大的便攜性和功能性優勢,如下表所述:
| 序號 | 項目 | Robotstudio |Factory I/O |Visualcomponents |IOA仿真 |
| --- | --- | --- |--- |--- |--- |
| 1 | 產地 | 瑞典 |美國 |芬蘭 | 國產 |
| 2 | 價格 | 低 |中 |很高 | 低 |
| 3 | PLC虛實仿真 | 無 |支持 |部分支持 | 全系列 |
| 4 | 模型庫 | 豐富 |一般 |豐富 | 較好 |
| 5 | 機械臂 | ABB系列 |不支持 |無在線仿真 | ABB、KEBA、固高、納博特、Python |
| 6 | 移動機器人 | 無 |無 |無 | 虛實仿真 |
| 7 | 硬件配套 | 無 |部分控制器 |實訓臺 | 多種組合 |
| 8 | 課程資源 | 多 |一般 |多 | 多 |
| 9 | 嵌入式 | 無 |無 |無 | 虛實結合 |
| 10 | 運動控制 | 無 |無 |少 | 支持|
| 11 | 模型庫導入 | 支持 |無 |支持 | 支持|
| 12 | AR/VR | 無 |不詳 |支持 | 支持|
>此外,IOA采用在線授權和升級方式,無論是模型庫、工程庫、軟硬件功能,每季度都會更新更多的功能庫,且所有功能和版本升級均為在線可升級,完全免費升級;
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝