
[TOC]
</div><div><br></div><div><br>
## S7-1500基礎傳送帶A到B控制
**工具:**
1、IOA4.0仿真軟件
2、博圖TIA PortalV15
3、1512虛擬軟件S7-PLCSIM Advanced V2.0 SP1
**概述:**
本案例主要是對實際工廠生產線中不同顏色物料挑選應用的簡單復現。它由造物生成、皮帶線、三色燈、十字轉向、顏色傳感器、切換開關以及十字開關等組成。當打開啟動開關后,可以實現不同顏色物料生成,通過選擇撥動十字開關按鈕到不同檔位,來使紅黃綠三種顏色物料運送到不同地方。

**課程下載:**
下載鏈接:[鏈接](https://pan.baidu.com/s/1nOojoSZjGd78qfXMH3KwVQ) 提取碼: cqts
</div><div><br></div><div><br>
## S7-1500氣動機械手搬運
**工具:**
1、IOA4.0仿真軟件
2、博圖TIA PortalV15
3、1512虛擬軟件S7-PLCSIM Advanced V2.0 SP1
**概述:**
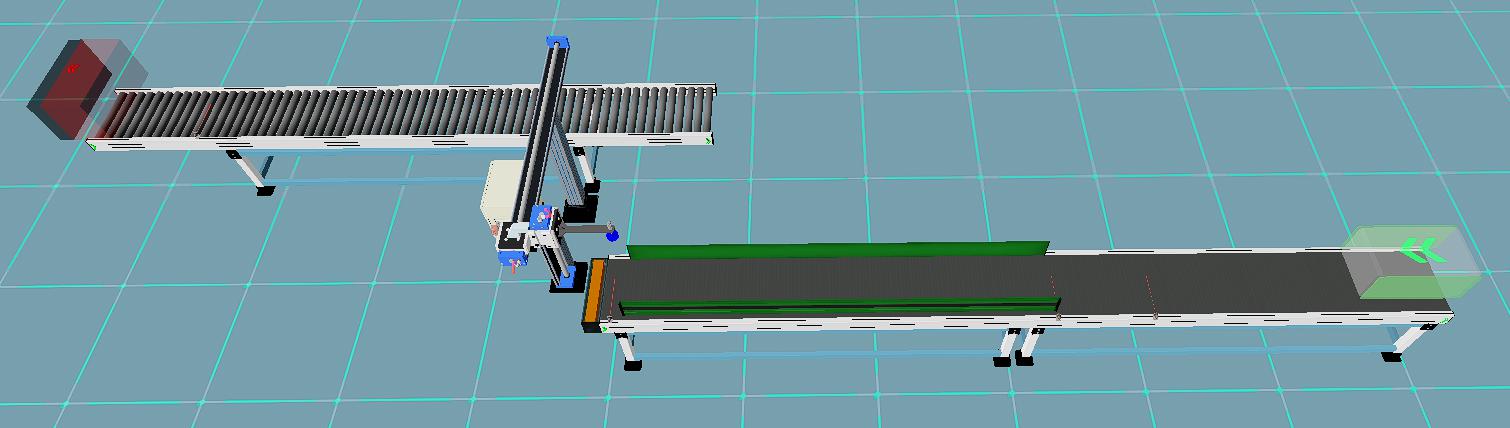
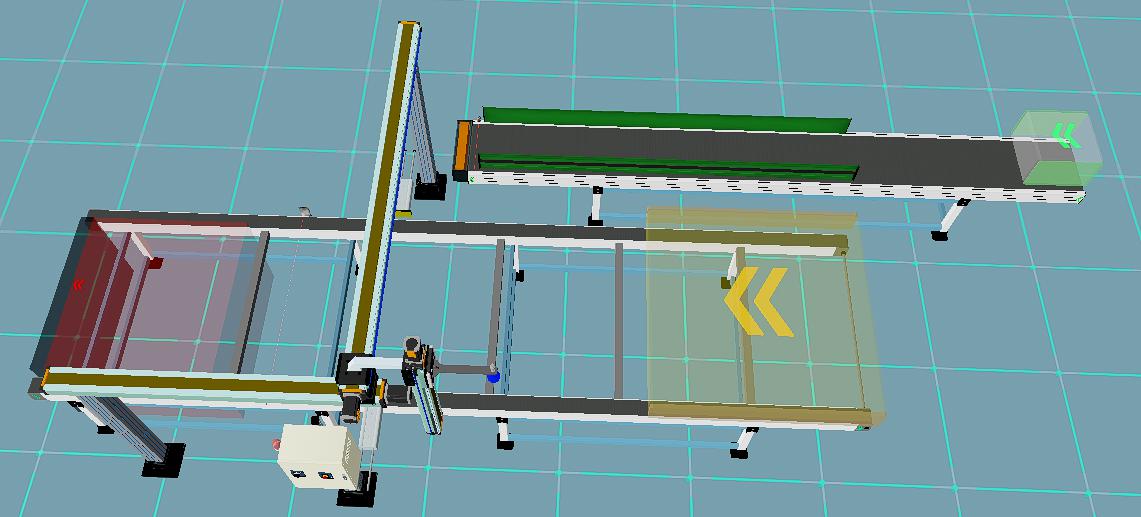
本案例主要是對實際工廠生產線中機械手運送物料應用的簡單復現,它由氣缸機械手、傳送帶、造物生成、阻擋氣缸、漫反射傳感器等組成,可以實現物料生成后由傳送帶運送到指定位置,再由傳感器獲取信號,然后機械手再開始動作,去抓取物料,然后由一條皮帶線運輸到另一條皮帶線,最終運送到目的地。
**課程下載:**
下載鏈接:[鏈接](https://pan.baidu.com/s/1TMWSQRFjUK3fmnYq2SuwfA) 提取碼: tfxt
</div><div><br></div><div><br>
## S7-1500三軸混合機械手分選
**工具:**
1、IOA4.0仿真軟件
2、博圖TIA PortalV15
3、1512虛擬軟件S7-PLCSIM Advanced V2.0 SP1
**概述:**
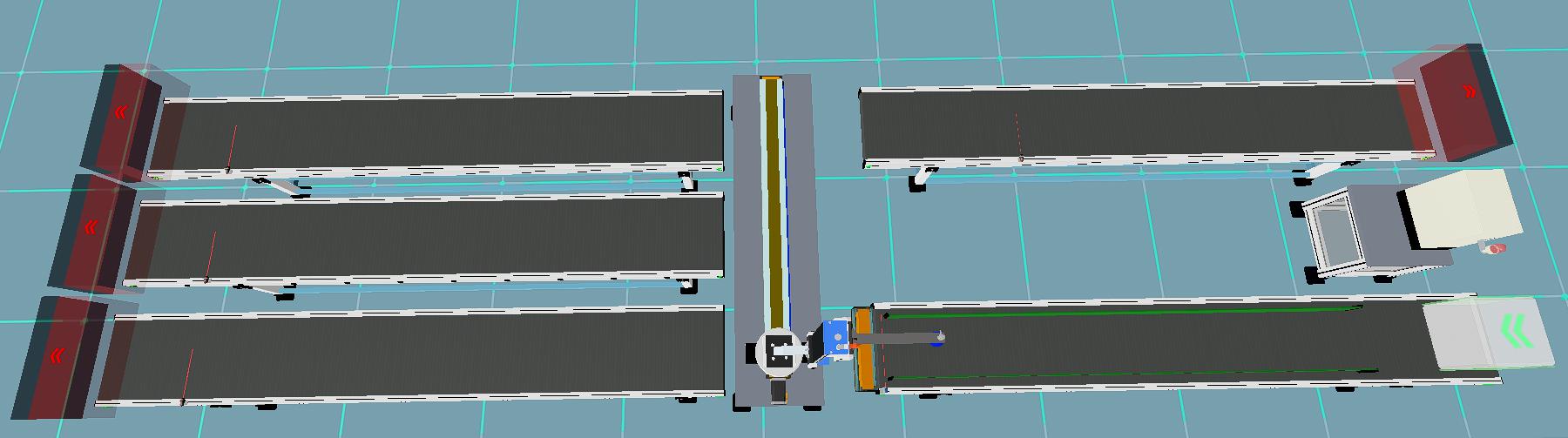
本案例主要是對實際工廠生產線中機械手運送物料應用的簡單復現,它由氣缸組合機械手、傳送帶、造物生成、阻擋氣缸、漫反射傳感器、顏色傳感器等組成,此次應用用來挑選不同顏色物料。按下啟動按鈕后,來使紅黃綠灰四種顏色物料運送到不同地方。
**課程下載:**
下載鏈接:[鏈接](https://pan.baidu.com/s/1mC_lZ3leHqPQxxkXh1C5xQ) 提取碼: 42xv
</div><div><br></div><div><br>
## S7-1500倉儲與Modbus通訊
**工具:**
1、IOA4.0仿真軟件
2、博圖TIA PortalV15
3、1512虛擬軟件S7-PLCSIM Advanced V2.0 SP1
4、Modbus通訊助手ModbusTCP\_Master
**概述:**
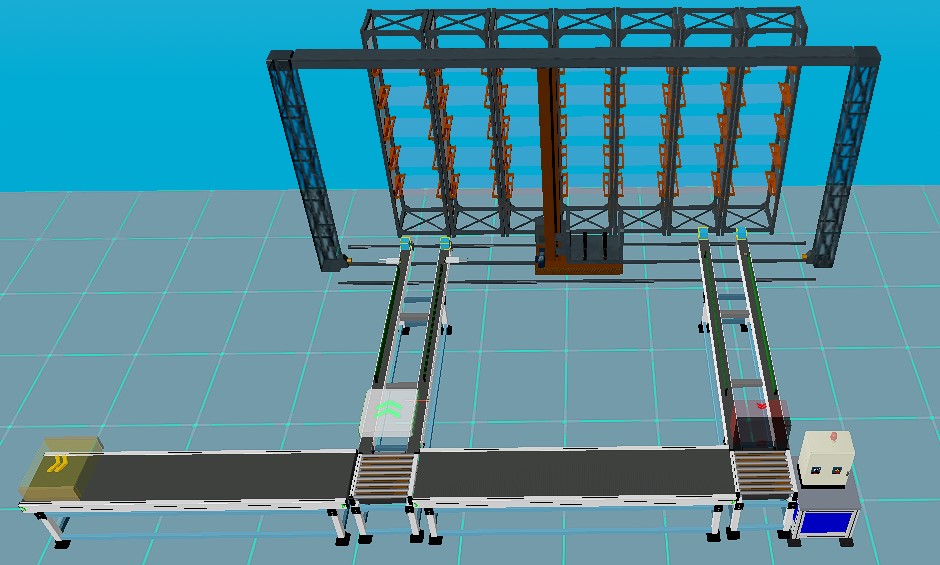
本案例主要介紹通過Modbus通訊實現對實際工廠生產線中物料的進出倉控制。系統運行后,棧板生成隨著皮帶線運送到進倉口位置,由傳感器感應并停止棧板與皮帶動作,電腦通過Modbus通訊發出信號,堆垛機接收信號開始動作,運動到進倉口,到位之后伸縮叉動作,將棧板送入庫中設定的位置;出倉口則是相反,即堆垛機利用伸縮叉從庫中取物料,然后送到出倉口,傳感器感應到物料后,啟動皮帶運輸走,至此,一個完整過程結束。
**課程下載:**
下載鏈接:[鏈接](https://pan.baidu.com/s/1MOYlfZzIpPUm4hMSbkQPig) 提取碼:80r5
</div><div><br></div><div><br>
## S7-1500三軸龍門碼垛
**工具:**
1、IOA4.0仿真軟件
2、博圖TIA PortalV15
3、1512虛擬軟件S7-PLCSIM Advanced V2.0 SP1
**概述:**
本案例主要是對實際工廠生產線中三軸機械手運送物料并堆垛應用的簡單復現,它由單軸機械手、傳送帶、造物生成、阻擋氣缸、漫反射傳感器、定位氣缸等組成,此次應用只用來對物料進行堆垛。
**課程下載:**
下載鏈接:[鏈接](https://pan.baidu.com/s/1mOcj0FM23qPir3_7PTOe3A) 提取碼: guet
</div><div><br></div><div><br>
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝