
[TOC]
</div><div><br>
## 1、PV大皮帶
模型圖片:
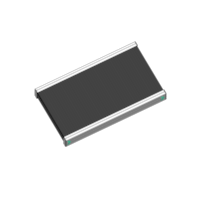
用途:
用于耗材的物流運輸
參數(尺寸/功能):
(1)寬度:500,1000,1500,2000,2500,3000,單位mm
(2)長度:1000,2000,3000,4000,5000,6000,單位mm
備注:
PV大皮帶其中心點在其底部,該模型厚度為80mm
控制接口:
(1)使能:DO控制,高電平控制傳輸使能開始轉動[機電單元模型說明](%E6%9C%BA%E7%94%B5%E5%8D%95%E5%85%83%E6%A8%A1%E5%9E%8B%E8%AF%B4%E6%98%8E.md)
(2)方向:DO控制,高低電平設置轉動方向,默認正方向
(3)速度:Float32控制,0~10的模擬量控制
類似模型:PV小皮帶、PV雙皮帶、GT滾筒、PV90度轉向(100、200、300、400、500、1000)
*****
</div><div><br>
## 2、十字轉向-500[三菱虛擬PLC編程仿真][納博特機器人編程仿真](%E7%BA%B3%E5%8D%9A%E7%89%B9%E6%9C%BA%E5%99%A8%E4%BA%BA%E7%BC%96%E7%A8%8B%E4%BB%BF%E7%9C%9F.md)(%E4%B8%89%E8%8F%B1%E8%99%9A%E6%8B%9FPLC%E7%BC%96%E7%A8%8B%E4%BB%BF%E7%9C%9F.md)
模型圖片:
參數(尺寸/功能):
用于傳輸物料和耗材的十字轉向
說明:
十字轉向傳輸帶為XY兩個方向的轉向傳輸,其下部具有頂升氣缸,當需要轉向時候通過頂升氣缸頂起進行轉向
控制接口:
(1)X使能:DO控制,X方向對傳輸帶傳輸使能,即滾筒傳輸使能
(2)X方向:DO控制,X方向對傳輸帶方向控制,即高電平為反方向
(3)X速度控制:Float32控制,0~10的模擬量控制速度
(4)Y氣缸使能:DO控制,使能后氣缸抬起,傳輸帶可Y方向運行
(5)Y使能:DO控制,Y方向對傳輸帶傳輸使能,即滾筒傳輸使能
(6)Y方向:DO控制,Y方向對傳輸帶方向控制,即高電平為反方向
(7)Y速度控制:Float32控制,0~10的模擬量控制速度
類似模型:十字轉向-300、十字轉向-1000
*****
</div><div><br>
## 3、阻擋氣缸
模型圖片:
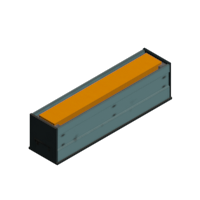
用途:
阻擋物料
參數(尺寸/功能):
長度:500,1000,1500,2000,2500,3000,單位mm
說明:
使能打開,氣缸頂起阻擋物料,并提供阻擋反饋
控制接口:
(1)使能:DO控制,高電平控制氣缸頂起
(2)阻擋反饋:DI控制,阻擋物料后高電平
類似模型:滾動阻擋器
*****
</div><div><br>
## 4、稱重傳輸帶
模型圖片:
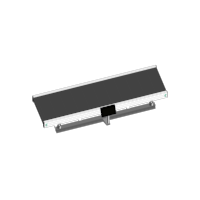
用途:
稱重傳輸帶能夠運輸和對耗材進行稱重,其傳輸帶具有模擬量反饋能夠測量耗材重量反饋至儀表盤
參數(尺寸/功能):
寬度:500,1000,1500,2000,單位mm
控制接口:
(1)使能:DO控制,高電平控制皮帶運轉
(2)方向:DO控制,高低電平設置轉動方向,默認正方向
(3)速度控制:Float32控制,0~10的模擬量控制速度
(4)稱重反饋:Float32反饋,模擬量顯示皮帶線上的物料重量,以KG計量
*****
</div><div><br>
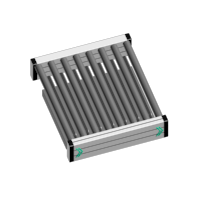
## 5、1000升降傳輸
模型圖片:

用途:
用于物料和耗材的升降傳輸
參數(尺寸/功能):
寬度:500,1000,1500,2000,單位mm
控制接口:
(1)電機接口:M伺服接口,用于控制傳輸帶上下位置坐標,0~12500mm
(2)高度反饋:Float32反饋,模擬量顯示皮帶線的高度。
(3)皮帶使能:DO控制,高電平控制皮帶運轉
(4)皮帶方向:DO控制,高低電平設置轉動方向,默認正方向
(5)皮帶速度:Float32控制,0~10的模擬量控制速度
(6)下限位反饋:DI控制,皮帶線到達最低點后高電平
(7)上限位反饋:DI控制,皮帶線到達最高點后高電平
(8)光電檢測:DI控制,皮帶中間有耗材經過或遮擋時候光電高電平
*****
</div><div><br>
## 6、定位氣缸
模型圖片:

用途:
氣缸夾緊定位物料位置
參數(尺寸/功能):
尺寸:200-1500,單位mm
控制接口:
(1)氣缸使能:DO控制,高電平控制氣缸夾緊
(2)負霍爾反饋:DI控制,氣缸無使能輸出高電平
(3)正霍爾反饋:DI控制,氣缸有使能輸出高電平
*****
</div><div><br>
## 7、皮帶線附件
| 名稱 |傳送帶支架 |斜坡滑臺 |傳輸擋板 |
| --- | --- |--- |--- |
| 模型圖片| 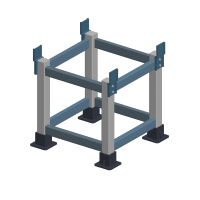 | 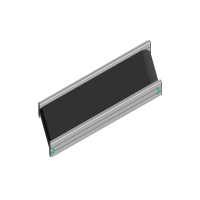 | |
| 用途 | 支撐皮帶線 | 用來導引耗材滑動到地面或其它地方 | 阻擋、保護物料 |
| 參數(尺寸/功能): | 寬度:500 ~ 3000,單位mm 長度:500 ~ 3000,單位mm 高度:500 ~ 2000,單位mm |寬度:500~3000單位mm | 入口出口: 帶倒角、無倒角;寬度:10 ~ 180 ,單位 mm;長度:200 ~ 3000,單位mm |
*****
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝