
## 1、西門子S7-1214主控實訓箱
 
>功能:
內置S7-1214主控CPU,集成以太網模塊;
集成RS485模塊,外置接口;
鋁合金外殼,配套便攜式把手;
一體化集成電路板,兼容香蕉頭、5.08接線端子接線;
## 2、電源網關模塊
 
>功能:
內置220V轉24V工業一體式開關電源;
內置保護電路開關,拔插式保險絲;
內置千兆網以太網網關,外置多路以太網接口;
多路電源開源及指示燈;
## 3、組合HMI人機交互模塊

>功能:
內置多路開關、急停按鈕;
內置4.3寸HMI威綸通/西門子/昆侖通態人機交互液晶;
鋁合金外殼,配套便攜式把手;
一體化集成電路板,兼容香蕉頭、5.08接線端子接線;
## 4、人機交互臺物聯網模塊
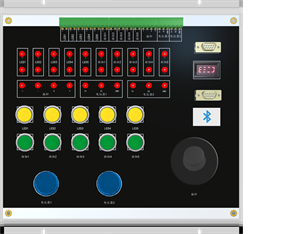 
>功能:
內置多路開關、急停按鈕,模擬量開發以及組合按鈕;
內置藍牙、WIFI模塊無線通訊功能,配置有無線遙控器;
鋁合金外殼,配套便攜式把手;
一體化集成電路板,兼容香蕉頭、5.08接線端子接線;
## 5、伺服運動控制模塊
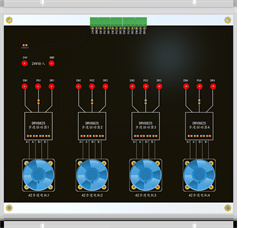 
>功能:
內置四路伺服/步進電機驅動 + 四路電機;
內置保護電路開關,急停按鈕開關;
鋁合金外殼,配套便攜式把手;
一體化集成電路板,兼容香蕉頭、5.08接線端子接線;
## 6、實驗工具包

>功能:
包含螺絲刀、接線端子排、螺絲工具盒;
配套以太網接線排線;
包含多種顏色實驗接線的香蕉線排線;
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝