
[TOC]
</div><div><br></div><div><br>
## **1、打開場景**
若您想打開已有的IOA場景文件,只需點擊系統欄中“**文件**”,在彈出的菜單中點擊“**打開**”,選擇需要打開的本地場景文件。
IOA官網上傳有大量配備好的場景文件,您可以免費下載使用,也可以繼續拓展這些場景:[工程中心](http://www.ioaol.com/engineering)
*****
</div><div><br></div><div><br>
## **2、新建場景**
IOA包含大量常見的工業設備零件。您可以新建場景來將完成一個屬于自己的虛擬工廠。
</div><div><br>
### (1) **新建場景**
點擊系統欄中“**文件**”按鈕,在彈出的菜單中點擊“**新建**”,系統彈出“**提示**”窗口,點擊“**是**”,系統將生成一個新的場景文件。
*****
</div><div><br>
### (2) **設備的添加**
編輯時,應使用在工具欄上的“**飛行模式**”。如果“**模型庫**”不可見,請單擊右上角的“模型庫” 圖標。
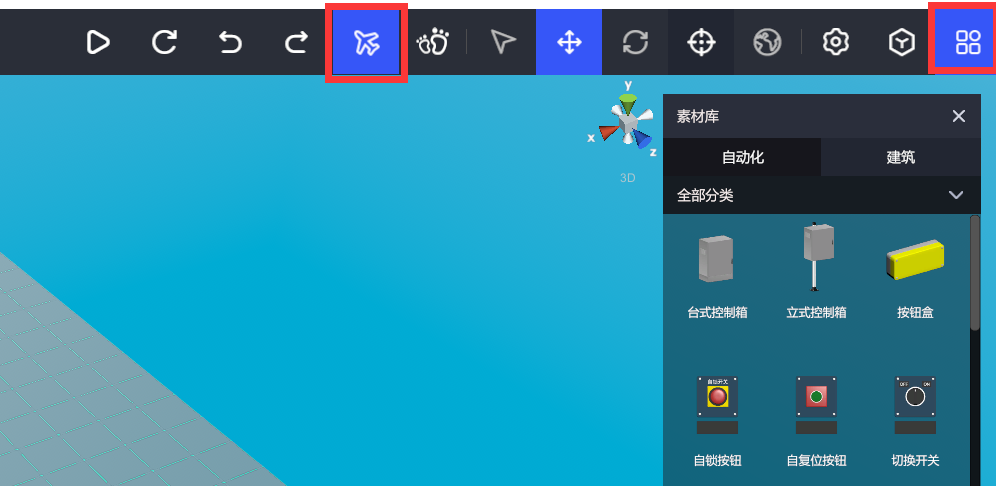
當使用自動化模型庫時:您只需使用鼠標左鍵拖拽模型庫中的設備模型到3D編輯區即可完成設備的添加;
當使用建筑模型庫時:鼠標左鍵點擊建筑模型,然后點擊3D編輯區即可添加,可以對建筑模型可吸附式一個個的快速搭建,點擊鼠標右鍵取消。
</div><div><br>
在這里分別選擇“自動化模型庫”下,“物流傳輸”中的“PV大皮帶”,“機器人”中的“ER3-600+A”以及“建筑模型庫”中的“矮紫模塊”。創建新零件時,它會自動變為選中狀態,拖動選定的零件放在您想要的位置。
注意到,與大多數其他部件一樣,皮帶線上有一個綠色箭頭指示默認流動方向。
*****
</div><div><br>
### (3)**模型設置修改**
選中PV大皮帶,單擊工具欄“模型配置”按鈕,界面彈出“模型設置界面”,能夠對模型進行位置角度、尺寸、性能和三視圖查看等基本操作。
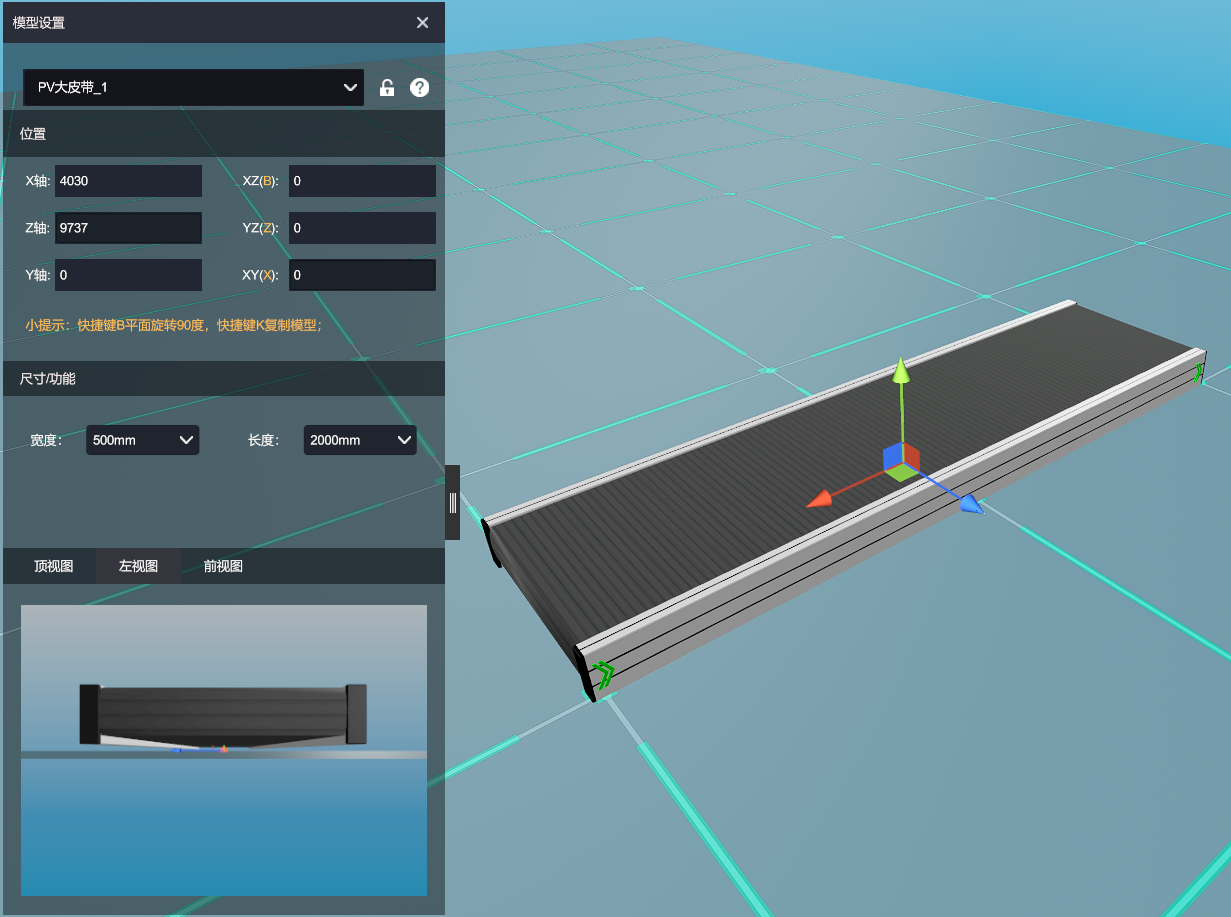
我們這這里修改PV大皮帶的長度為2000mm。
備注:
* 模型設置頁碼是在非運行模式下點擊模型設置按鈕打開;
* 模型設置多用在3D布局環節之中使用;
* 并不是所有模型的尺寸可以更改,每個模型具有其特定的設置選項
* 通過輸入框可改變模型坐標和角度
*****
</div><div><br>
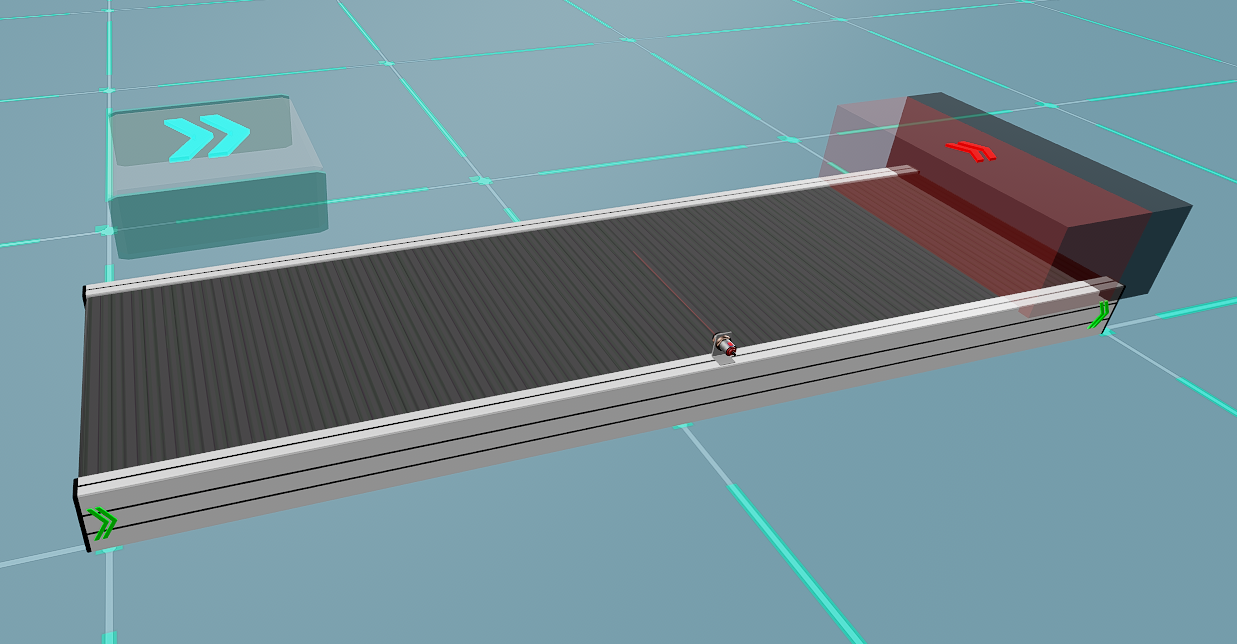
### (4)**完善場景**
在這里我們將使用到導航球
在模型工程搭建的時候,需要頻繁對準和切換,這時候需要用到3D導航球,可快速切換2D與3D效果,查看各個視角與應用的效果,這個方法在進行場景設計時候非常有效。
我們在場景中添加一個“物料耗材”中的“”幾何模塊生成”,將它的截面大小設置為240*240,顏色為隨機。一個“消失箭頭”,寬度設置為600mm,放置在皮帶線的最右方,用以消失物料。以及一個“漫反射開關”,可以用這個漫反射開關實現計數等功能。如下圖,我們完成一個簡單的物料計數場景。
</div><div><br>
### (5) **保存場景**
待您完成場景搭建完成后,點擊系統欄中“**文件**”,在彈出的菜單中點擊“**保存**”,在彈出的“**保存文件**”界面選擇保存位置并命名文件。
*****
</div><div><br></div><div><br>
## **3、手動調試**
建議您在使用外部控制器(例如PLC)控制場景之前,先對其進行手動測試。這樣,您可以確保場景布局按預期工作。
作為傳感器或執行器的任何部件都至少具有一個控制接口。可以接收三種不同的信號輸入:布爾值用于開/關值,浮點型用于模擬值(實數),以及伺服驅動驅動伺服電機。
在手動控制場景中,您可以手動改變執行器的接口數據,模擬來自控制器的一個值。
使用在第2步中創建的場景,嘗試使用皮帶線運輸產生的物料,當漫反射開關檢測到物料時輸出的DI信號為1。
(1)通過快捷鍵“**F5**”或點擊工具欄“**開始/停止**”按鈕,切換到“運行”模式。
備注:
> 運行模式下能夠對設備進行模擬控制以及虛實連接控制;
>停止模式下能夠對設備進行移動旋轉、以及電氣接線配置;
(2)單擊工具欄”**顯示控制**“按鈕,顯示模擬控制界面。
(3)點擊編輯區的皮帶線,則顯示PV大皮帶的接口界面,點擊”使能"控制按鈕,打開使能,點擊“速度控制”可改變皮帶線速度。同樣的打開幾何模塊生成的造物使能。查看漫反射開關輸出情況。
</div><div><br></div><div><br>
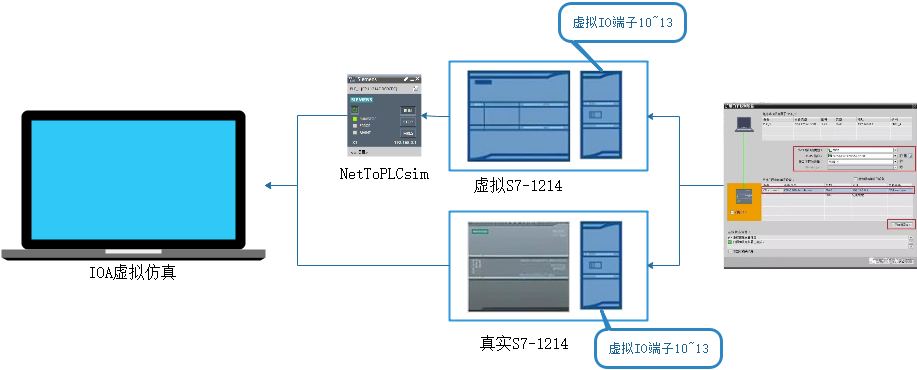
## **4、控制器控制**
現在,您已經創建了虛擬工廠場景,并完成了手動調試,是時候使用控制器對其進行控制了。首先,您應該了解什么是I/O驅動程序以及如何使用它們。
I/O驅動程序是IOA的內置功能,負責與外部控制器通訊。IOA包含許多I/O驅動程序,每個驅動程序用于一種特定技術。您可以根據要使用的控制器在IOA中選擇一個驅動程序。接下來,配置此驅動程序,以便它知道如何與控制器通訊以及如何從中讀取和寫入I/O。
例如,本教程展示了如何使用西門子S7-1200 PLC。同樣的此處描述的大多數步驟也適用于其他驅動程序。
*****
### (1) **添加控制器**
IOA支持多種控制器,我們以西門子S7-1200控制器為例
點擊系統菜單欄中的“**控制器**”,在彈出的“**添加控制器**”界面點擊“**+添加**”按鈕。
控制器類別選擇“**工業PLC**”,控制器型號為“**S7_1214_S1**”,點擊“**確定**”,即添加完成。
*****
</div><div><br>
### (2)**配置接線**
添加控制器之后,便可以使用控制器的輸入輸出接口控制模型,我們以PV大皮帶為例:
選中皮帶線,點擊菜單欄“**顯示控制**”按鈕,將顯示PV大皮帶的“**模擬控制**”界面,點擊界面右側的**彈出按鈕**,將S7_1214_S1的輸出點“**Q10.0**”拖拽到PV大皮帶的使能開關處。若想刪除接線,點擊“**×**”號即可
*****
</div><div><br>
設備完成接線,并完成PLC控制程序后,設置為“**運行模式**”并測試PLC邏輯。
具體的各類控制器的控制方法見**虛實仿真教程**
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝