
[TOC]
## **1、軟件下載**
>ABB機器人控制器軟件下載地址[鏈接](https://pan.baidu.com/s/1kJP6e6ob_hSpIRa8girDOg)提取碼:let7。
******
## 2、**軟件模擬仿真**
IOA虛擬工廠與虛擬ABB機器人連接步驟說明如下:
### (1)添加ABB機器人虛擬控制器
在IOA虛擬工廠菜單欄中點擊控制器添加-工業機器人-ABB_R6_V1,添加一個ABB六軸機器人控制器。

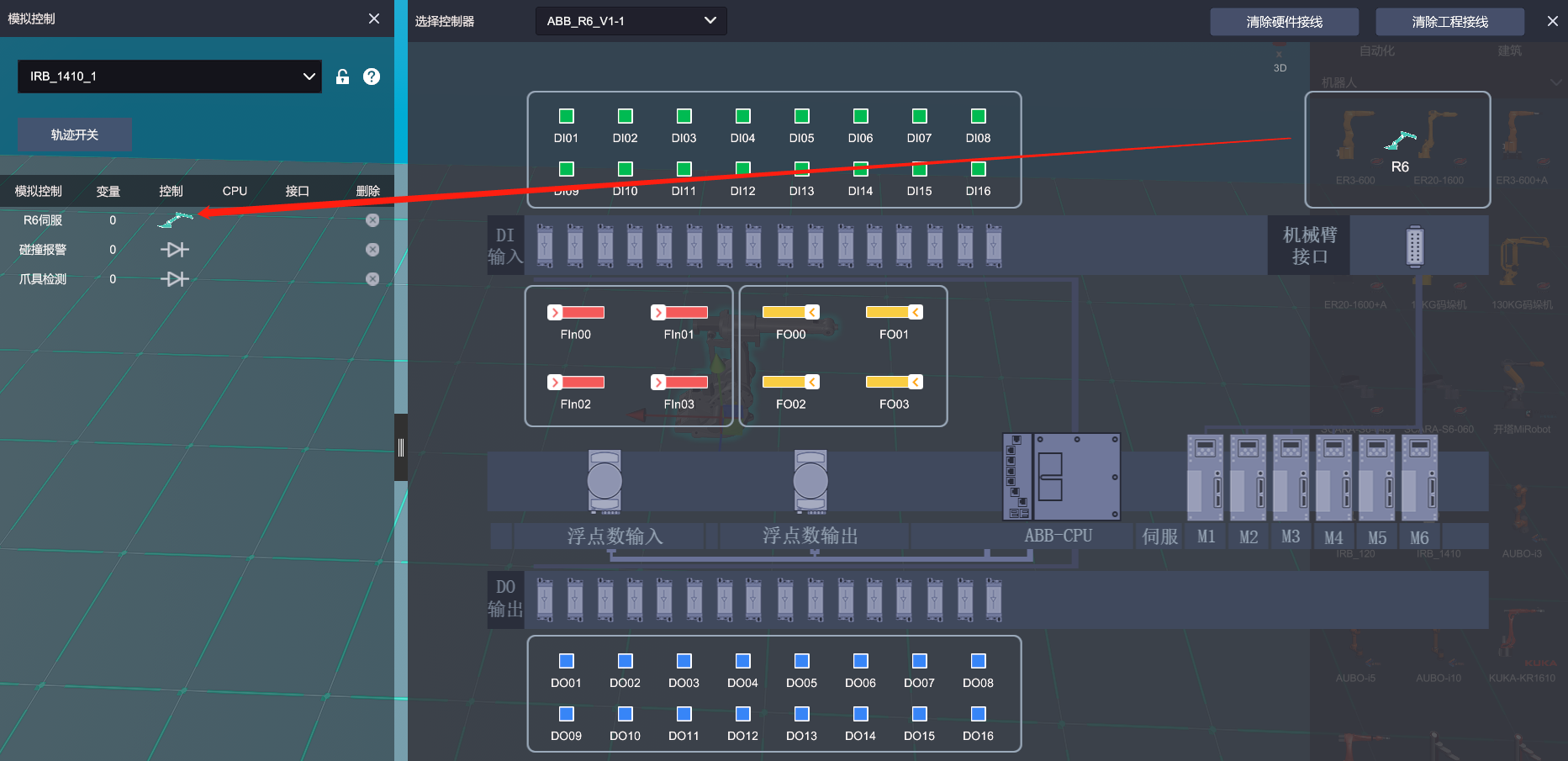
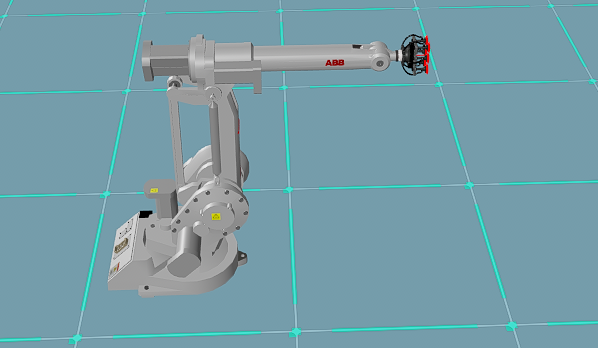
### (2)添加六軸機器人模型,并給機器人伺服配線
在IOA虛擬工廠里添加一臺IRB_1410_1的六軸機器人模型,并且將ABB_R6_V1的R6伺服配置給機器人的R6。
### (3)打開ABB機器人控制器軟件,并與IOA進行連接
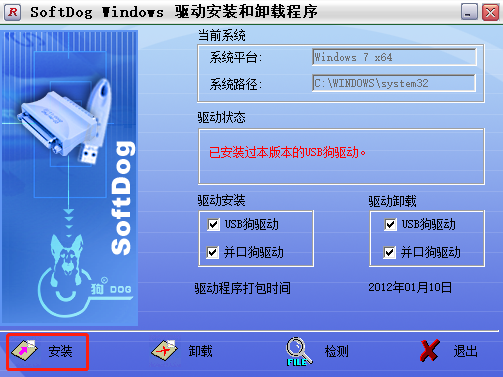
需要先安裝加密狗軟件并插入加密狗

然后打開ABB機器人控制器軟件,并選擇對應使用的機器人型號
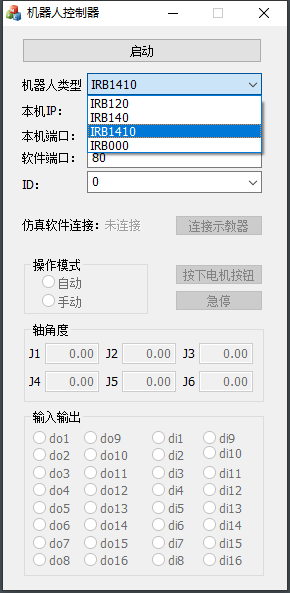
點擊啟動
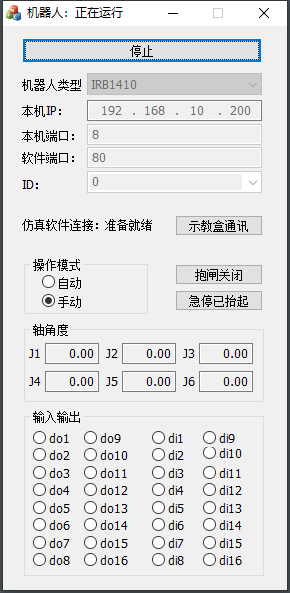
在IOA控制器里進行連接,IP地址為127.0.0.1,端口80。

### (4)打開ABB示教器
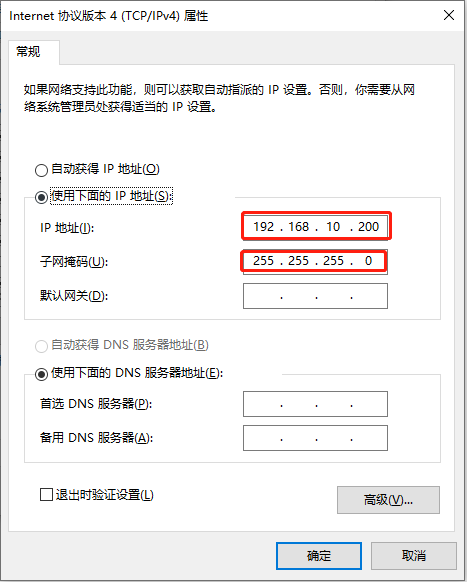
1)設置IP地址
將示教器通電,并將網口插入到電腦
打開網絡和共享中心,因ABB網口的接入,會增加一個新的以太網,然后對其屬性進行修改
2)ABB示教器的使用
**手動控制**
(1)點擊視角左上角菜單欄
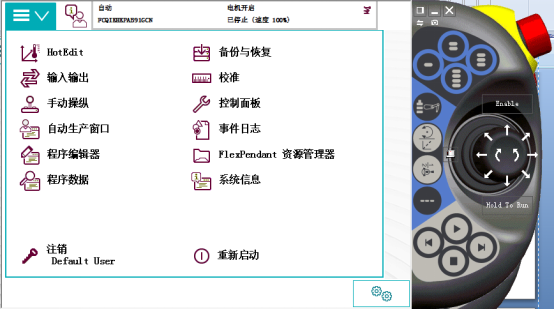
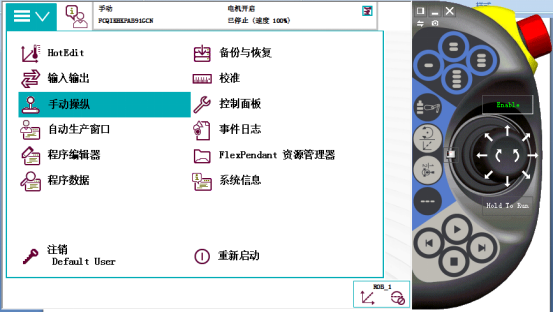
(2)主菜單欄手動操縱
(3)手動操縱內選擇動作模式
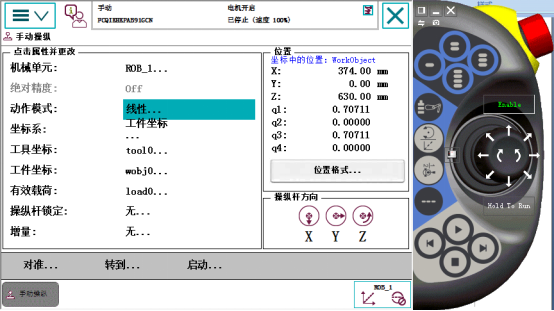
(4)動作模式內選擇軸,點擊確定。
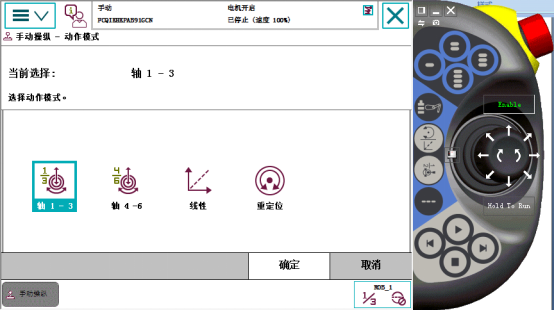
(5)示教盒按下使能按鈕,按正方向操作搖桿,可以查看IOA軟件中機器人模型各軸運動。
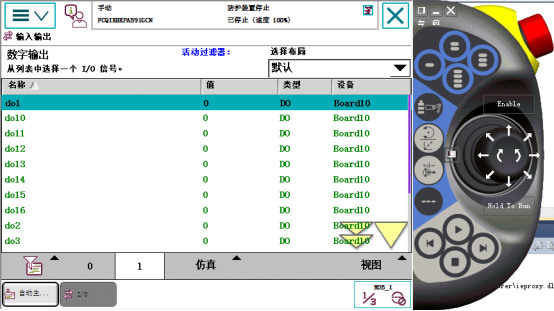
**IO控制**
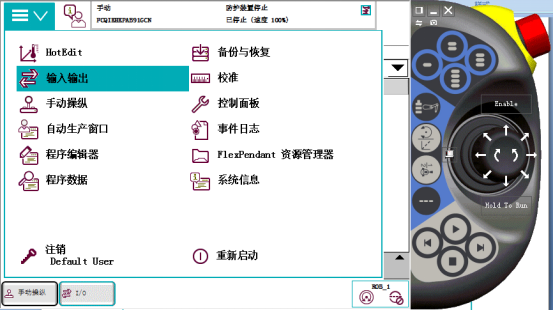
(1)在主菜單界面選擇輸入輸出
(2)輸入輸出界面點擊視圖,選擇數字輸出
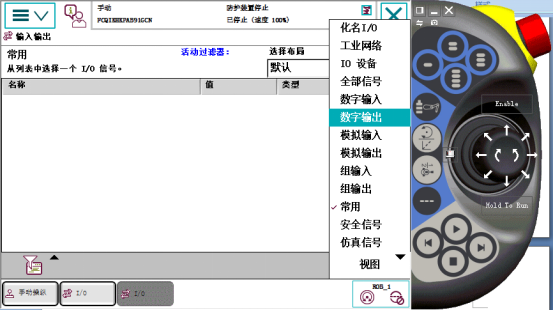
(3)選擇do1,點擊
**新建程序**
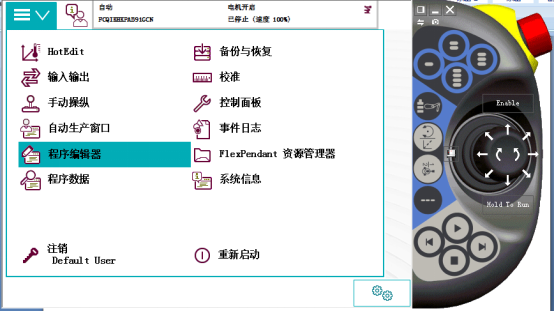
(1)點擊視角左上角菜單欄

(2)點擊菜單欄—程序編輯器
(3)程序編輯器內點擊任務與程序
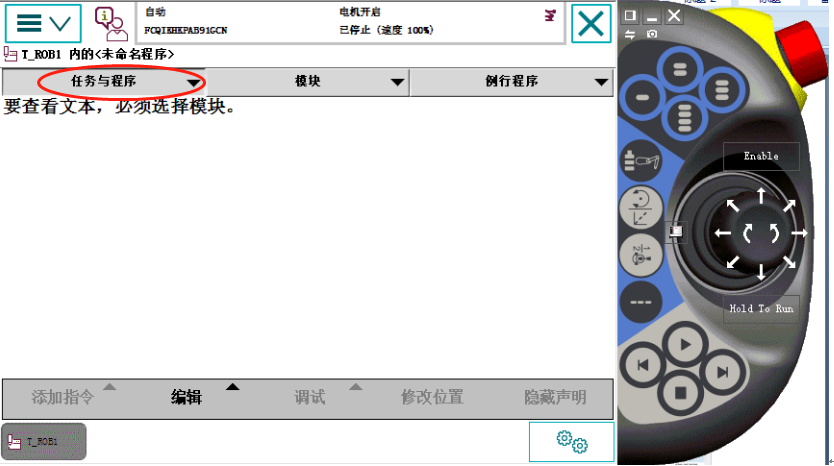
(4)任務與程序內點擊文件
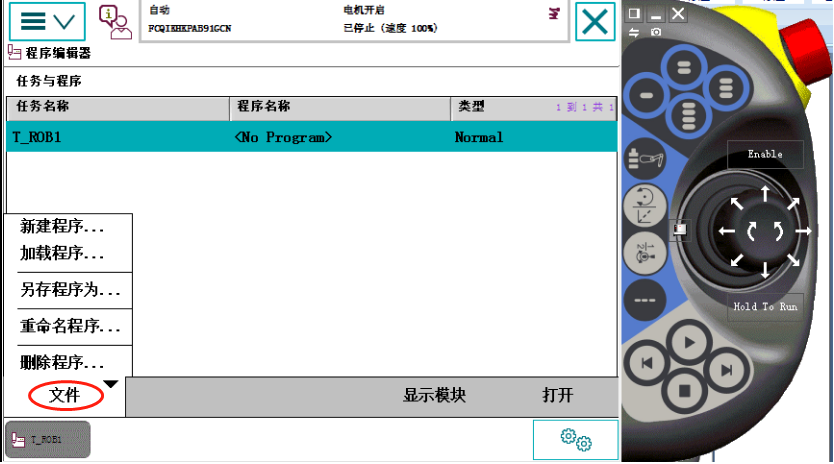
(5)在文件菜單內點擊新建程序,系統自動生成帶有主例行程序的模塊。
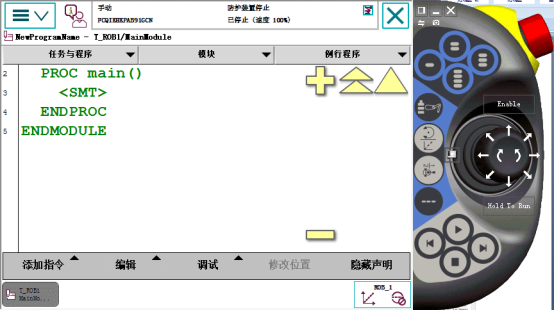
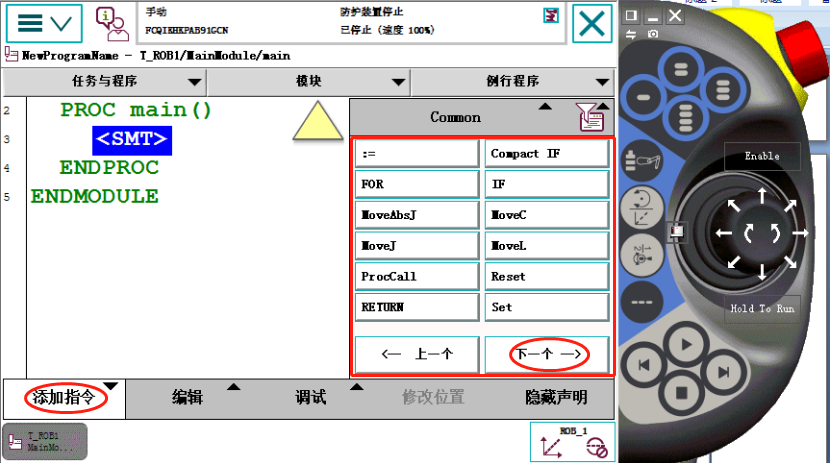
(6)根據搭建場景及控制要求,進行合理編程
- 目錄
- IOA互動仿真
- 認識IOA虛擬仿真
- IOA功能與導航
- 數字孿生資源
- 軟件使用協議
- 注冊與安裝
- 注冊與使用
- IOA安裝及激活
- IOA操作及入門
- 概述
- 用戶界面操作
- 基礎操作
- 界面設置
- 屏幕錄制
- 導航方式
- 快捷鍵與仿真
- 3D場景搭建
- 一般模型搭建
- 自定義模組拼接
- 電氣控制箱拼接
- XYZ多軸機械手拼接
- 機器人吸盤、夾具拼接
- 自定義模型導入與使用
- 移動機器人場景搭建
- 建筑模型庫
- 手動調試
- 模擬控制與調試
- 一般信號調試
- 工業機器人調試
- 自定義添加控制器
- 圖形化Py-Teach控制器
- Py-R4控制器添加與控制
- Py-S4控制器添加與控制
- Py-R6控制器添加與控制
- 西門子PLC添加與控制
- 西門子實體PLC1214添加與控制
- 西門子虛擬PLC1214添加與控制
- 西門子虛擬PLC1512添加與控制
- 三菱PLC虛擬仿真
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與控制
- ZMC運動控制器
- VPLC運動視覺控制器
- KEBA工業機器人示教編程
- 納博特機器人示教編程
- ABB機器人示教編程
- 遨博機器人示教編程
- 機器視覺與API
- Arduino-UNO單片機
- Arduino-MEGA單片機
- ESP32物聯網單片機
- 虛擬電氣接線
- 輸入輸出接口認識
- 控制器之間通訊
- 導出接線表
- VR仿真與多人互動
- PC多人互動
- VR多人互動
- APP多人互動
- IOA模型庫概覽
- 物流傳輸模型庫說明
- 機械零件模型說明
- 機電單元模型說明
- 傳感交互模型說明
- 人機交互模型
- 傳感器模型
- 虛擬繼電模型
- 機器人模型
- 物料模型庫
- 移動機器人
- 建筑模型
- 虛實仿真教程
- 西門子S7-1200編程仿真
- 西門子S7-1500編程仿真
- 三菱虛擬PLC編程仿真
- KEBA工業機器人編程仿真
- 納博特機器人編程仿真
- ABB機器人編程仿真
- Py-Teach通用示教器仿真教程
- Arduino-uno編程仿真
- Arduino-mega編程仿真
- ESP32物聯網單片機編程仿真
- 機器視覺API及編程
- 正運動ZMC308編程仿真
- IOA硬件商城
- IOA產品概述
- 西門子PLC
- 運動控制系統
- KEBA機器人
- IOA孿生六軸機器人套裝