
[TOC]
## 認識IOA數字孿生界面
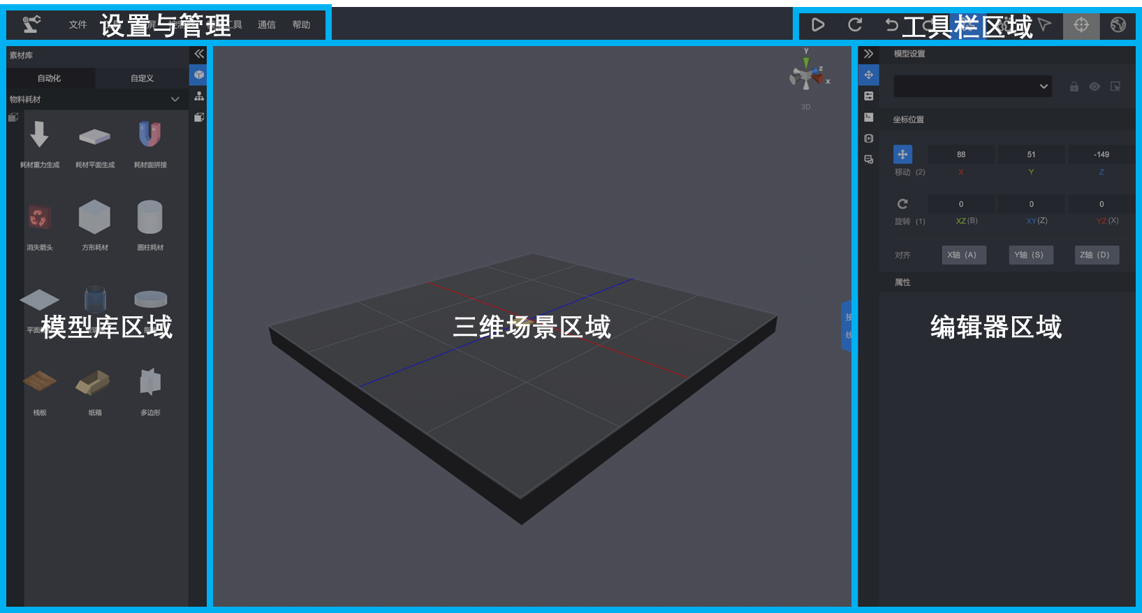
>IOA軟件具有3D編輯區、模型庫、工具欄、參數/控制設置以及系統欄,系統具有運行模式以及編輯模式兩種模式狀態,如上圖所示;
*****
## 認識IOA軟件工具圖標

>IOA軟件的工具欄具有運行停止、視角操作、3D模型操作、以及擴展面板操作,各個圖標功能如下;
| 圖標 | 名稱 | 操作 |
| --- | --- | --- |
|  | 運行/停止 | 開始或停止仿真 |
|  | 刷新 | 點擊后場景耗材消失 |
|  | 撤銷 | 撤銷上一個移動位置操作(不撤銷返回) |
|  | 重做 | 將最后一次撤銷恢復到上一個移動位置(不撤銷返回) |
|  | 飛機視角 | 在飛機視角操作,即上帝視角 |
|  | 第一人稱 | 在第一人稱操作(在運行模式下常用) |
|  | 選擇激活 | 激活后可選擇設備 |
## 認識IOA編輯器區域
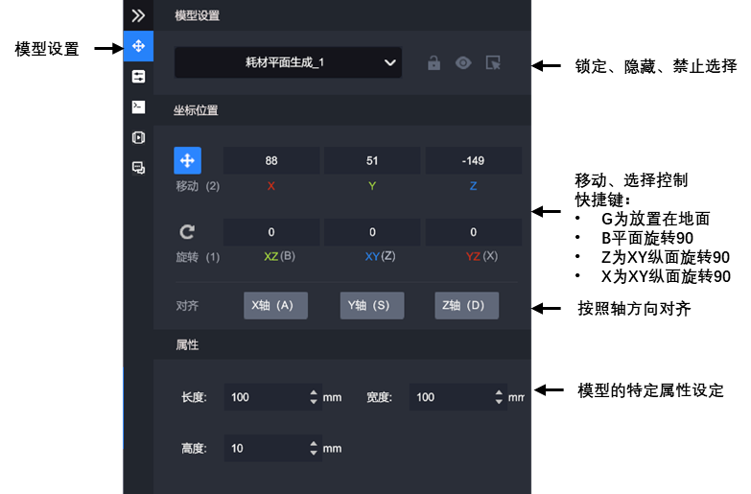
IOA的模型編輯器,在右側欄,通過箭頭可以展開關閉,其功能面板如下所述:
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- IOA開發工具下載匯總
- (二)、三維場景搭建
- 坐標及旋轉
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 實體S7-1200控制器的添加
- 虛擬S7-1200控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- 開塔機器人使用教程
- IOA與開塔機器人仿真
- 工業機器人(ABB)仿真
- Py-teach快速編程仿真
- Py-teach與IOA仿真
- Py-teach語法與編程
- Python編程與仿真
- Python與IOA仿真方法
- Python編程API說明
- 樹莓派與IOA仿真
- EAIDK610與IOA仿真
- 單片機接入與仿真控制
- Mixly與IOA
- ArduinoIDE
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-UNO_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- (四)、自定義控制器添加
- modbus-tcp自定義控制器