
# 說明
本節課主要講述如何使如何通過IOA連接KEBA虛擬和實體控制器;
# **IOA連接虛擬控制器**
>使用的控制器為納博特虛擬控制器;
>虛擬工廠軟件為IOA,版本為V5.0以上;
## **1、軟件及工程下載**
>KEBA軟件下載地址[(KEBA下載)](https://pan.baidu.com/s/1yAynkV5BVaXAkDXszN1fLA)提取碼:1234
> IOA連接KEBA虛擬控制器[(工程包)](//down.ioaol.cn/004C4645FEBD000C)
>
KEBA軟件安裝教程[鏈接](//down.ioaol.cn/004C46C880D80026)
KEBA機器人使用手冊[鏈接](//down.ioaol.cn/004C46CC542E0027)
******
## 2、**軟件模擬仿真**
>IOA虛擬工廠與虛擬KEBA機器人連接步驟說明[(點擊跳轉播放)](https://www.bilibili.com/video/BV1Dp4y1W7MK/)
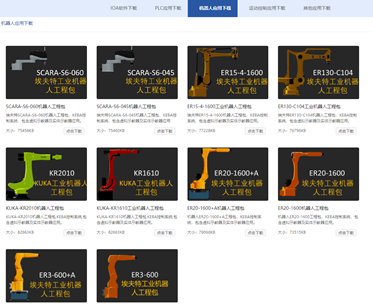
### (1)拖拽使用的機器人型號至仿真環境
在右側素材庫機器人分欄里選擇要使用的機器人型號,將其拖拽至仿真環境中,適當進行位置校準(以添加一個六軸機器人ER20-1600+A為例)。

### (2)選擇適的機器人控制器型號
在上部菜單欄選擇控制器一欄,點擊添加,依次進行選擇:控制器類別為工業機器人,控制器型號為KEBA_R6_V1,控制器ID為1。

### (3)機器人配線
點擊上部菜單欄右側的箭頭,點擊進行接線,拖拽R6信號至模擬控制的R6伺服接口,完成機器人的配線操作。


### (4)KEBA機器人D-H工程包
1、ER3-600機器人工程包[鏈接](//down.ioaol.cn/004C46BBB9F9001D)
2、ER10-1600機器人工程包[鏈接](//down.ioaol.cn/004C46BC4A21001F)
3、ER20-1700機器人工程包[鏈接]()
4、ER3-600+A機器人工程包[鏈接](//down.ioaol.cn/004C46BB55E2001C)
5、ER10-1600+A機器人工程包[鏈接](//down.ioaol.cn/004C46BBF21D001E)
6、KUKA-KR1610機器人工程包[鏈接](//down.ioaol.cn/004C46BCB74F0021)
7、KUKA-KR210機器人工程包[鏈接](//down.ioaol.cn/004C46BD09AF0022)
8、SCARA-S6-045機器人工程包[鏈接](//down.ioaol.cn/004C46BD09AF0022)
9、SCARA-S6-060機器人工程包[鏈接](//down.ioaol.cn/004C46BD09AF0022)
### (5)打開KEBA虛擬示教器平臺
1)在工程包中,具有多種類型和型號機器人工程,需要選擇固定的機器人工程并進行編譯和仿真。在此例中我們采用[ER20-1600的機械臂控制器]();
在文件夾里,依次打開虛擬機系統固件 ER20-1600_v20201002s文件夾,雙擊打開Axis6_demo.project工程。

2)編譯,打開工程,點擊編譯圖標,編譯工程(也可以點擊“Build”菜單下的“Rebuild”選項),確保工程沒有錯誤。
選擇虛擬仿真,創建六軸虛擬仿真工程。
3)啟動六軸虛擬仿真。
4)激活虛擬機,在“Communication settings”窗口中,先點擊圖中激活框,取消激活,再點擊一次重新激活。
確保Axis6為 RUN 狀態。
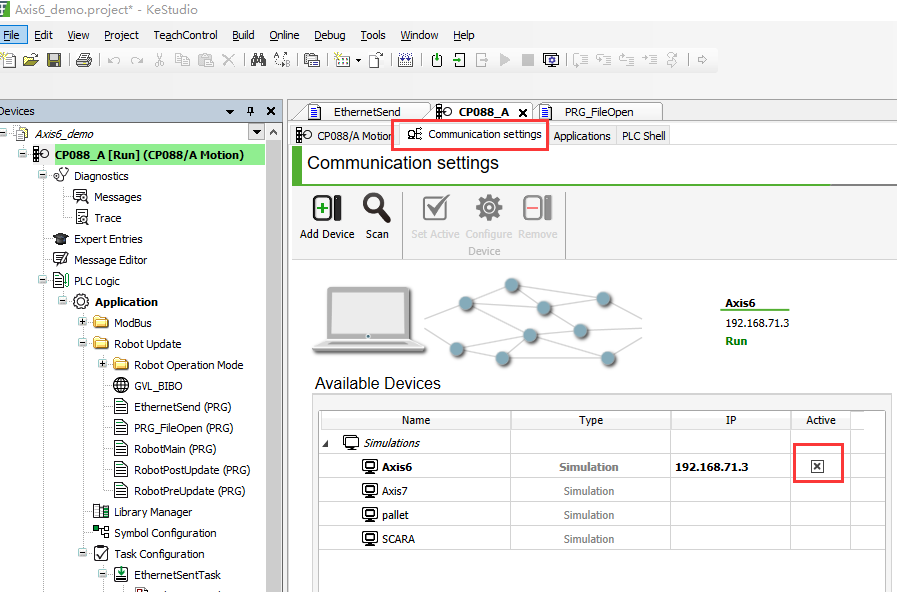
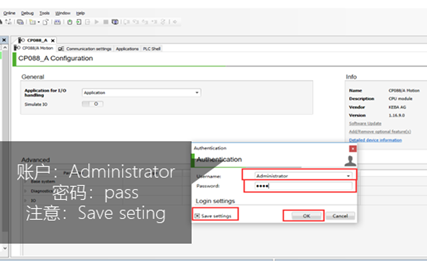
5)下載,點擊菜單欄的下載按鈕,輸入Administrator賬戶以及pass密碼,保存輸入,點擊OK,并依次點擊OK進行下載,下載時間大約2~5分鐘;
注意:(首次運行或更換機械臂種類才需要下載,已經使用過該機器人則不需要重復下載)
6)開啟虛擬示教器,雙擊桌面上已經安裝完成的KeMotion3 03.12a圖標選擇“KeMotion TeachView T70Q TeachView_3.14a”圖標,運行虛擬示教器。

7)運行虛擬示教器,運行之后會彈出一個命令行窗口,等待一段時間會運行虛擬示教器界面,在界面中選擇Axis6設備,點擊右側的對號即可。
進入后,選擇用戶為Administrator,密碼為pass。

8)在IOA軟件中連接虛擬控制器,控制器ID、IP地址、端口號與虛擬示教器保持一致,完成虛擬工廠到虛擬控制器的配置映射。


********
# **IOA連接實體控制器**
## 1、硬件仿真
>IOA虛擬工廠與真實KEBA機器人連接步驟說明[(點擊播放)](https://www.bilibili.com/video/BV1GY4y1q7dE?share_source=copy_web)
IOA虛擬工廠與真實KEBA機器人連接工程案例[(案例下載)]()
### (1)接入方法講解
IOA軟件與真實KEBA示教器連接仿真步驟具體如下(以六軸機器人為例):
1)用網線將電腦和機器人控制器進行連接。并將電腦網卡設置為1網段。

2)打開IOA虛擬工廠仿真軟件,選擇ER20-1600型號六軸工業機器人拖拽至仿真頁面。

3)打開控制箱電源,將KEBA-R6-V1 控制箱電源接口使用品字型插頭連接到220V電源上,并按下船型開關接通電氣柜的電源;
使用RJ45水晶頭通訊電纜將控制柜與PC端網口進行連接(確定電腦的默認IP地址為靜態IP,如192.168.1.15);
將KEBA示教器電纜上的航插連接到KEBA-R6-V1 控制箱的示教器接口上。

4)登錄示教器Administrator,在示教器中選擇登錄Administrator,密碼pass;
設備信息獲取:按下示教器左上角的菜單按鈕,進入獲取設備信息界面,讀取控制器的IP地址,端口號及設備ID。

5)添加控制器,點擊控制器圖標,打開添加控制器畫面,添加KEBA-R6-V1控制器;
填寫ID以及IP地址,點擊連接按鈕(ID與IP地址在示教器的設備信息畫面有顯示)。

6)配置接線,通過虛擬工廠虛擬接線,配置相應的六軸機器人進行虛實控制示教編程;
選中機器人→點擊配置接線→將機器人拖入模擬控制→點擊運行。

### (2)如何更新KEBA控制器固件
登錄IOA官網下載最新版KEBA控制器系統固件。[點擊下載](http://www.ioaol.com/down#There)
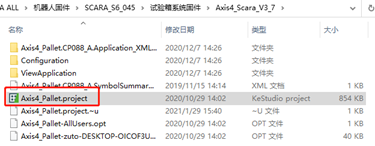
選擇相應的機器人控制器工程包固件下載,將試驗箱固件中Axis4_Pallet.project打開(以SCARA_S6_045為例)。
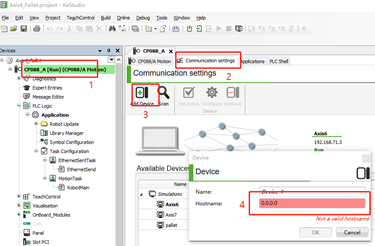
選擇CP088_A打開,選擇Communication settings里的Add Device,輸入真實KEBA示教器的IP地址。
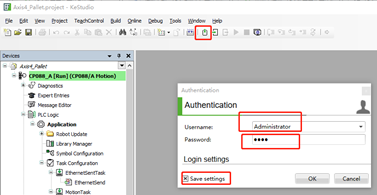
點擊下載按鈕,填寫Username為Administrator,Password為pass,選擇Save settings。
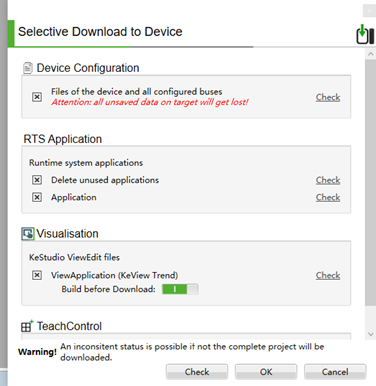
點擊OK即可將SCARA_S6_045型號控制器固件下載至KEBA示教器中。
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- IOA開發工具下載匯總
- (二)、三維場景搭建
- 坐標及旋轉
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 實體S7-1200控制器的添加
- 虛擬S7-1200控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- 開塔機器人使用教程
- IOA與開塔機器人仿真
- 工業機器人(ABB)仿真
- Py-teach快速編程仿真
- Py-teach與IOA仿真
- Py-teach語法與編程
- Python編程與仿真
- Python與IOA仿真方法
- Python編程API說明
- 樹莓派與IOA仿真
- EAIDK610與IOA仿真
- 單片機接入與仿真控制
- Mixly與IOA
- ArduinoIDE
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-UNO_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- (四)、自定義控制器添加
- modbus-tcp自定義控制器