
## 說明
本節課講述如何通過IOA連接至**虛擬**的西門子S7-1200系列控制器;
>使用的PLC編程軟件為西門子博圖軟件,版本為TIA Portal V15;
>虛擬工廠軟件為IOA,版本為V5.0以上;
>虛擬S7-1200與實體控制器的仿真區別如下表所述:
| 控制模塊 | 實體S7-1200 | 虛擬S7-1200 |
| --- | --- |--- |
| 方式 | 實體接入 | PLCSIM接入 |
| 編程 | 博圖V15 | 博圖V15 |
| IO | 32個IO | 32個IO |
| 步進/伺服 |有 | 無|
除以上表格所述,實體S7-1200與虛擬仿真與控制方法完全一致;
>IOA與虛擬S7-1214仿真教程視頻[(點擊跳轉播放)](https://www.bilibili.com/video/BV1zZ4y1B7Ys/)
*******************
## IOA與虛擬S7-1200系列控制使用步驟:
### 第一步:安裝和下載對應軟件包

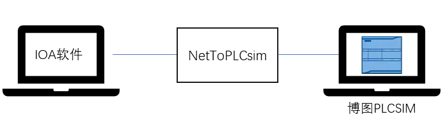
IOA通過PLCSIM及NeToPLC進行仿真PLC的鏈接,所以首先確定電腦安裝以上軟件;
> [博圖V15軟件下載安裝;](https://pan.baidu.com/s/1SliuSbTn93IjtnJg2s-tIg)提取碼:1234
> [博圖V16軟件下載安裝;](https://pan.baidu.com/s/1o7YlEaLpENAremxhs0pUuA?pwd=1234)提取碼:1234
> 備注:包含NetToPLCsim 軟件已在博圖安裝包;
| 控制器型號 | 工程下載 |
| --- | --- |--- |
| S7-1212C | [博圖V15工程](//down.ioaol.cn/004C463D1B91000A) |
| S7-1212C | [博圖V16工程](//down.ioaol.cn/004C463D1B91000A) |
### 第二步:啟動虛擬S7-1200
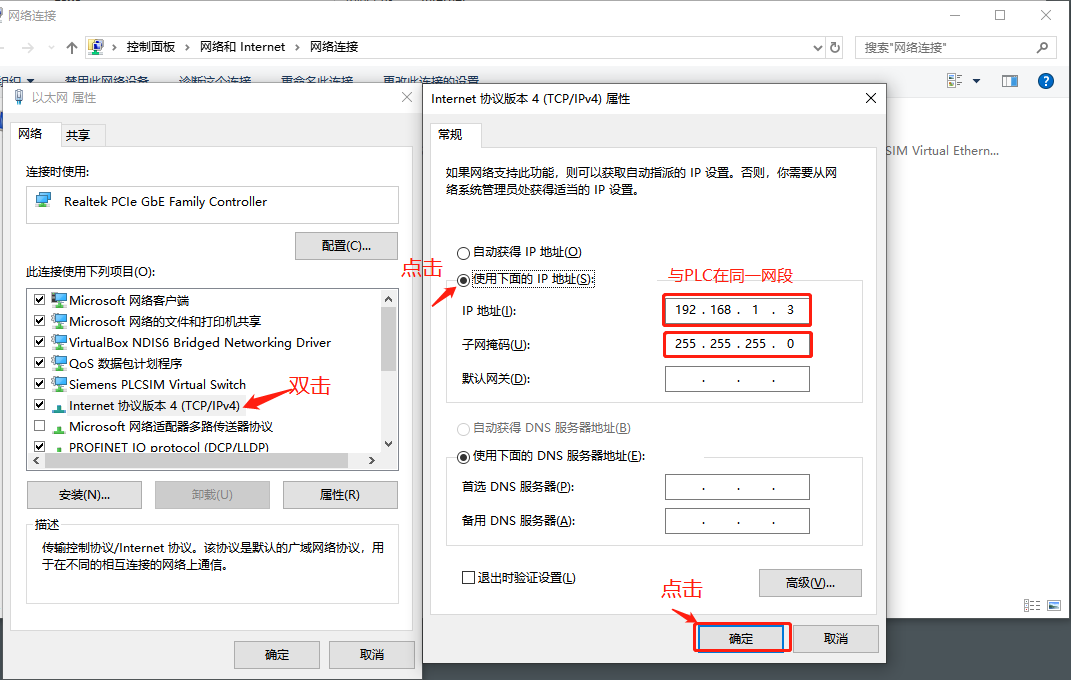
1、首先從電腦控制面板中進入到網絡和Internet,并進入到網絡和共享中心,選擇左側的更改適配器,找到以太網并右擊進入屬性設置,然后先啟動Nettoplcsim軟件。
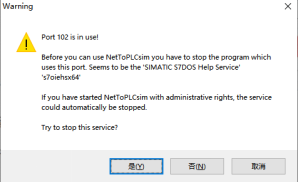
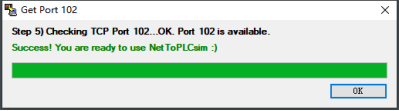
2、開啟“NetToPLCsim.exe ”:依次打開S7-1200控制工程文件夾->S7-1200仿真PLC程序文件夾- >Nettoplcsim 文件夾。以管理員身份運行“NetToPLCsim.exe"。在彈出的窗口中依次點擊“是”、“OK”按鈕。
**注:一定要在啟動 PLCSIM 軟件之前啟動 Nettoplcsim 軟件!!!**
再啟動 PLC SIM,下載程序
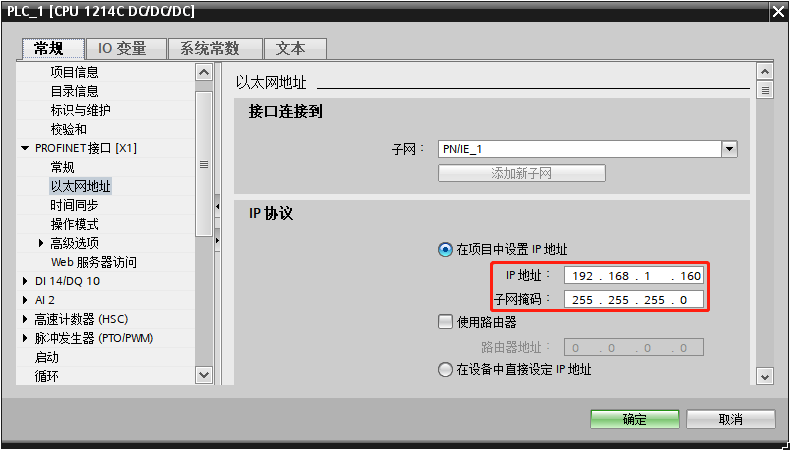
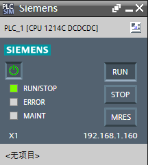
3、在博途中打開S7-1200 PLC模板程序,在PLC屬性設置中設置PLC 的IP地址為192.168.1.160
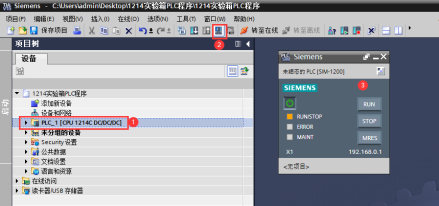
下載“S7-1200 仿真 PLC 程序”,在設備列表中選擇“PLC_1”,并點擊“開始”仿 真按鈕,啟動仿真 PLC。
將編寫好的 PLC 程序控制工程下載到仿真 PLC 中,操作步驟與實體 PLC 一致。在彈出的“擴展的下載到設備”對話框中,“PG/PC接口的類型”選擇“PNIE”、“PG/PC接口”選擇“PLC SIM ”、“接口/子網的連接”選擇PLC實際的接口,單擊“開始搜索”按鈕。
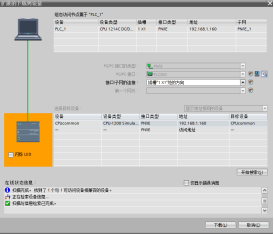
工程下載完成后需點擊“啟動 PLC”按鈕
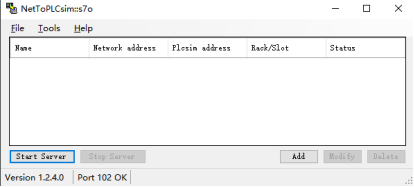
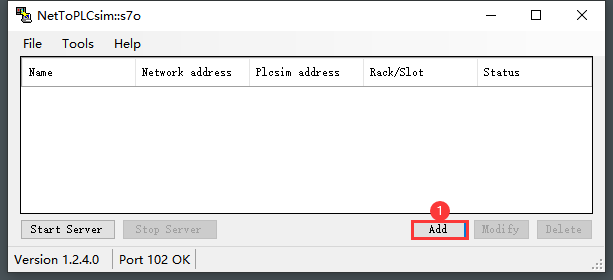
4、設置 NetToPLCsim 軟件參數
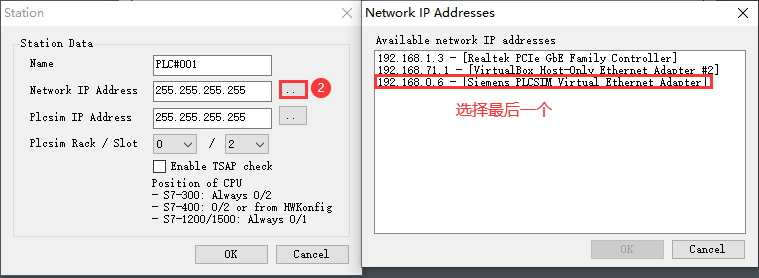
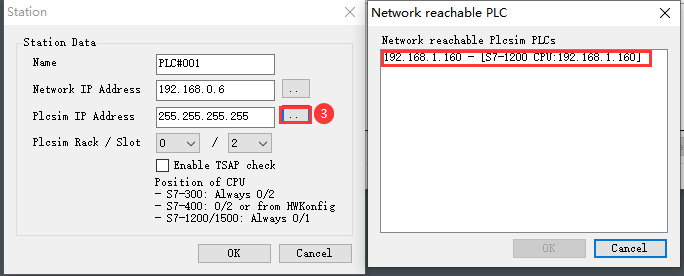
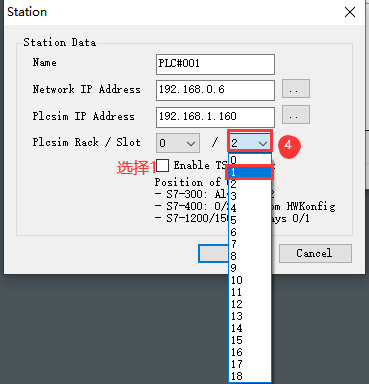
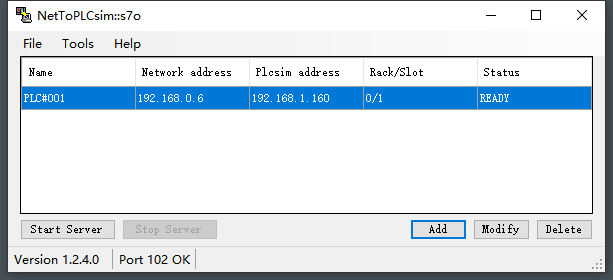
* 打開 NetToPLCsim 軟件窗口,點擊”Add”按鈕,在彈出的“Station”窗口中,分別點擊兩個 IP 地址輸入框后的選擇按鈕,在彈出窗口中選擇 IP,并點擊“OK”按鈕。
* 在 Plcsim Rack/Slot 中按圖選擇 1 號插槽。
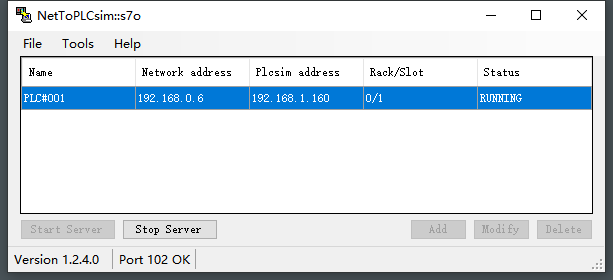
* 點擊“Start Server”按鈕,當 Status 顯示“”RUNNING”,表示 NetToPLCsim 設置成功。
*****
### 第二步,通過IOA鏈接NetToPLCsim
打開IOA軟件,點擊左上角系統欄里的控制器選項;

從面板中選擇添加控制器,添加控制器為S7-1214-S1
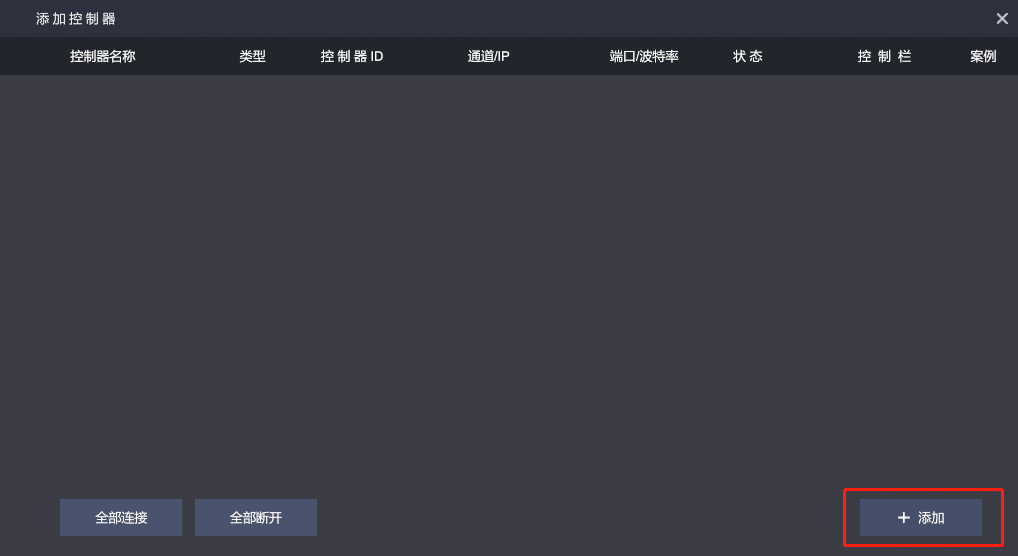
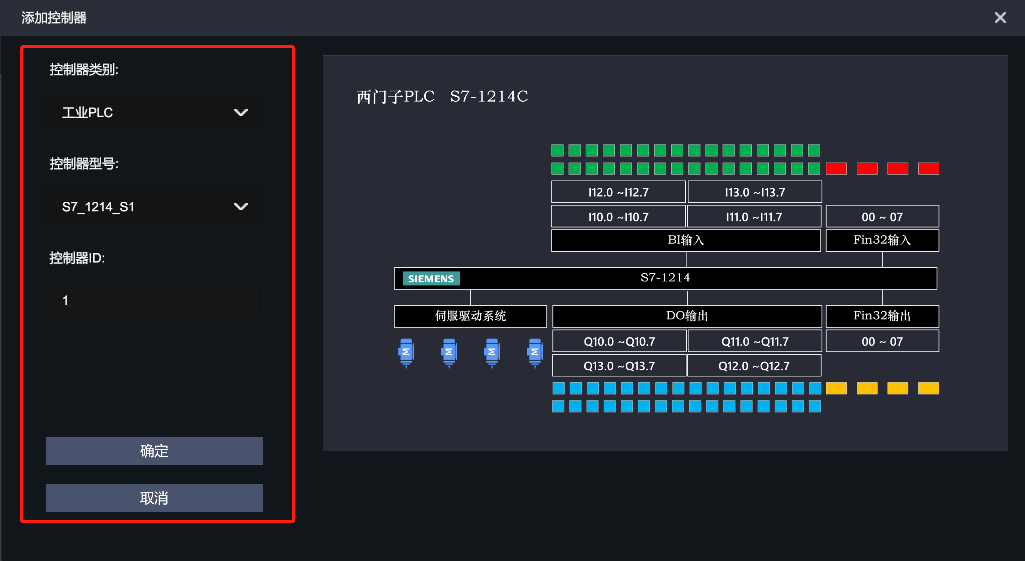
最后點擊確定按鈕,完成控制器添加。
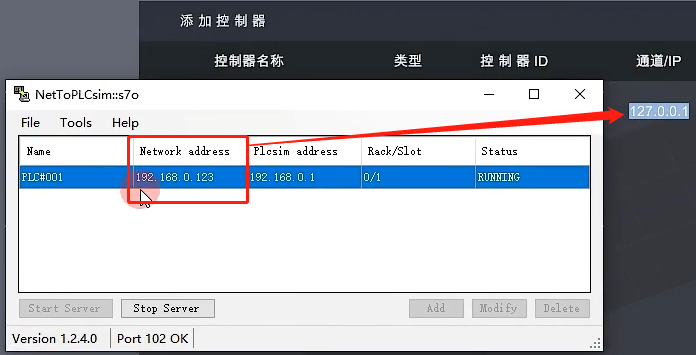
從添加的控制器中,輸入通道/IP,**輸入NetToPLCsim的192.168.0.123**,端口/波特率,點擊連接
輸入后,點擊鏈接,連接成功。
*****
*****
- IOA-更新與安裝
- 軟件注冊與安裝
- 軟件使用協議
- 注冊與使用
- (一)、認識IOA基礎界面功能
- UI界面與設置
- 軟件環境設置
- 三維導航操作
- 3D導航球使用
- 快捷鍵與仿真
- IOA開發工具下載匯總
- (二)、三維場景搭建
- 坐標及旋轉
- 模型樹與拼接
- 從SolidWorks到IOA放置的模型自制
- IOA輔助工具
- (三)、虛擬電氣與調試
- (三)、虛實控制與編程
- 西門子PLC的仿真與控制
- 實體S7-1200控制器的添加
- 虛擬S7-1200控制器的添加
- 西門子PLCS7-1512控制器的添加
- 三菱PLC的仿真與控制
- 三菱PLC仿真器的使用說明
- 三菱PLC的添加與說明
- 工業機器人(納博特)仿真
- 工業機器人(KEBA)仿真
- 工業機器人(埃夫特)仿真
- 協作機器人(遨博)仿真
- 運動控制(ZMC308)正運動仿真
- 機器視覺(VPLC516)正運動仿真
- 微型機器人(開塔)仿真
- 開塔機器人使用教程
- IOA與開塔機器人仿真
- 工業機器人(ABB)仿真
- Py-teach快速編程仿真
- Py-teach與IOA仿真
- Py-teach語法與編程
- Python編程與仿真
- Python與IOA仿真方法
- Python編程API說明
- 樹莓派與IOA仿真
- EAIDK610與IOA仿真
- 單片機接入與仿真控制
- Mixly與IOA
- ArduinoIDE
- Mixly-MEGA_S虛擬工廠SDK
- Mixly-UNO_S虛擬工廠SDK
- Mixly-ESP32虛擬工廠SDK
- (四)、自定義控制器添加
- modbus-tcp自定義控制器